 RT—thread线程启动详解
RT—thread线程启动详解

就序列表实现
就序列表实际上就是一个数组,用来存放优先级不同的线程,系统默认最大的线程数量为32个,用户可自行修改。
线程创建好之后,我们需要把线程添加到就绪列表里面,表示线程已经就绪,系统随时可以调度。 就绪列表在scheduler.c中定义(scheduler.c第一次使用需要在rtthread3.0.3src目录下新建, 然后添加到工程的rtt/source组中)
/* 线程就绪列表*/
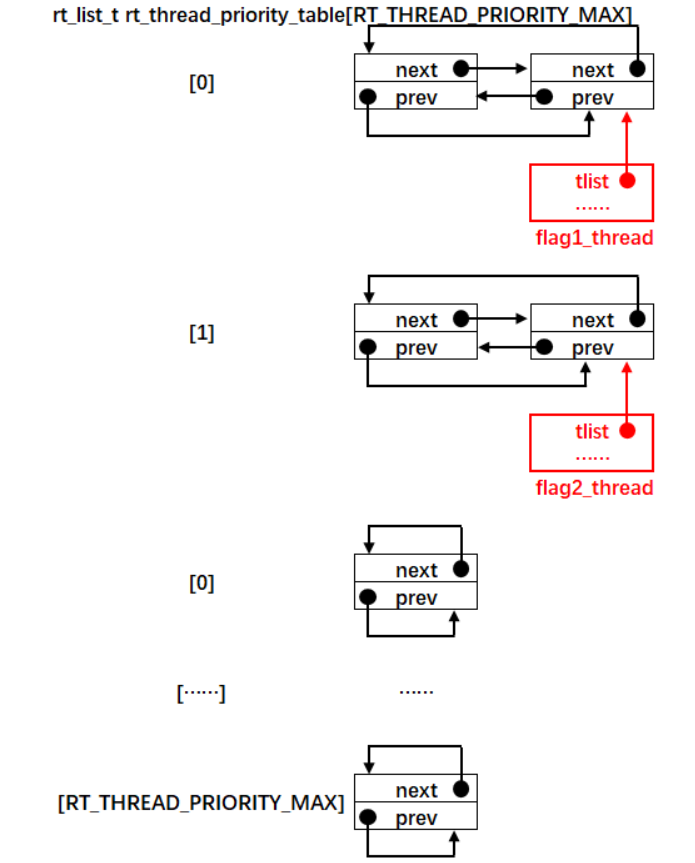
rt_list_t rt_thread_priority_table[RT_THREAD_PRIORITY_MAX]; // (1)
就绪列表实际上就是一个rt_list_t类型的数组,数组的大小由决定最大线程优 先级的宏RT_THREAD_PRIORITY_MAX决定,RT_THREAD_PRIORITY_MAX在rtconfig.h中默认定义为32。 数组的下标对应了线程的优先级,同一优先级的线程统一插入到就绪列表的同一条链表中。
线程控制块里面有一个tlist成员,数据类型为rt_list_t,我们将线程插入到就绪列表里面,就是通过将线程控制块的tlist这个节点插入到就绪列表中来实现的。如果把就绪列表比作是晾衣杆,线程是衣服,那tlist就是晾衣架,每个线程都自带晾衣架,就是为了把自己挂在各种不同的链表中。
下面在线程中加入就绪列表信息,如下;
/* 初始化线程 */
rt_thread_init( &rt_flag1_thread, /* 线程控制块 */
flag1_thread_entry, /* 线程入口地址 */
RT_NULL, /* 线程形参 */
&rt_flag1_thread_stack[0], /* 线程栈起始地址 */
sizeof(rt_flag1_thread_stack) ); /* 线程栈大小,单位为字节 */
/* 将线程插入到就绪列表 */
rt_list_insert_before( &(rt_thread_priority_table[0]),&(rt_flag1_thread.tlist) );
/* 初始化线程 */
rt_thread_init( &rt_flag2_thread, /* 线程控制块 */
flag2_thread_entry, /* 线程入口地址 */
RT_NULL, /* 线程形参 */
&rt_flag2_thread_stack[0], /* 线程栈起始地址 */
sizeof(rt_flag2_thread_stack) ); /* 线程栈大小,单位为字节 */
/* 将线程插入到就绪列表 */
rt_list_insert_before( &(rt_thread_priority_table[1]),&(rt_flag2_thread.tlist) );
就绪列表的下标对应的是线程的优先级,但是目前我们的线程还不支持优先级,有关支持多优先级的知识点我们 后面会讲到,所以flag1和flag2线程在插入到就绪列表的时候,可以随便选择插入的位置。在 代码清单:线程的定义-21 中,我们选择将flag1线程插入到就绪列表下标为0的链表中,flag2线程插入到就绪列表下标为1的链表中
下一步调度器初始化:
/* 初始化系统调度器 */
void rt_system_scheduler_init(void)
{
register rt_base_t offset;// (1)
/* 线程就绪列表初始化 */
for (offset ==== 0; offset < RT_THREAD_PRIORITY_MAX; offset ++)// (2)
{
rt_list_init(&rt_thread_priority_table[offset]);
}
/* 初始化当前线程控制块指针 */
rt_current_thread ==== RT_NULL;// (3)
}
线程调度要在硬件初始化之后
int main(void)
{
/* 硬件初始化 */
/* 将硬件相关的初始化放在这里,如果是软件仿真则没有相关初始化代码 */
/* 调度器初始化 */
rt_system_scheduler_init();
/* 初始化线程 */
rt_thread_init( &rt_flag1_thread, /* 线程控制块 */
flag1_thread_entry, /* 线程入口地址 */
RT_NULL, /* 线程形参 */
&rt_flag1_thread_stack[0], /* 线程栈起始地址 */
sizeof(rt_flag1_thread_stack) ); /* 线程栈大小,单位为字节 */
/* 将线程插入到就绪列表 */
rt_list_insert_before( &(rt_thread_priority_table[0]),&(rt_flag1_thread.tlist) );
/* 初始化线程 */
rt_thread_init( &rt_flag2_thread, /* 线程控制块 */
flag2_thread_entry, /* 线程入口地址 */
RT_NULL, /* 线程形参 */
&rt_flag2_thread_stack[0], /* 线程栈起始地址 */
sizeof(rt_flag2_thread_stack) ); /* 线程栈大小,单位为字节 */
/* 将线程插入到就绪列表 */
rt_list_insert_before( &(rt_thread_priority_table[1]),&(rt_flag2_thread.tlist) );
/* 启动系统调度器 */
rt_system_scheduler_start();
}
审核编辑:符乾江
-
嵌入式
+关注
关注
5209文章
20664浏览量
337123 -
RT
+关注
关注
0文章
74浏览量
40832 -
线程
+关注
关注
0文章
510浏览量
20872
发布评论请先 登录
基于RT-Thread的简单物联网温控箱 | 技术集结
代码里的青春——我与RT-Thread的故事
使用rt_thread无法输出PWM怎么解决?
rt-thread studio 如何进行多线程编译?
线程问题,线程已经创建成功了,为什么线程调用的函数不会运行呢?
切换线程后中断被屏蔽怎么解决?
2025年RT-Thread开发者巡回培训报名正式启动!

RT-Thread Nano移植后动态创建线程创建不了怎么解决?
rtthread一直卡在rt_thread_idle_entry()的原因?
在线程删除时遇到断言,是什么原因导致的?
线程中调用rt_thread_mdelay()函数卡死的原因?怎么解决?
rt-thread线程调用rt_thread_mdelay延时后再恢复运行时thread会变,导致mutex释放失败,怎么解决?
如何移植 RT-Thread Nano 并创建 2 个线程?
深度剖析 RT-Thread 线程调度流程




评论