 电动汽车的智能化和自动驾驶系统方面的比较
电动汽车的智能化和自动驾驶系统方面的比较

引言
近期有关电动汽车的智能化和自动驾驶系统方面的比较,成了一个热点的话题。目前传统车企推出的电动汽车,典型的以iX3和EQC为例,在定价方面还是遵循传统的逻辑,在智能化和自动驾驶方面是沿用传统车的系统架构来支撑的。我们以目前iX3的BMW的叫法,自动驾驶辅助系统Pro来说明。
备注:这个名字也是比较别扭的,跟上形势要叫自动驾驶,不让客户误导要加入辅助两个词
01
系统的架构
在之前的介绍中,我们可以看到这套ADAS的系统基础版本是基于Euro NCAP(欧洲新车安全评鉴协会)驾驶辅助测评,不同部署的车型按照评分来设计,也就是满分四星“VERY GOOD”评级为标杆。由于系统本身是模块化的,所以从单个车型到中国可搭载在十余个车型系列,包含轿车,轿跑车以及运动多功能车,适用于内燃机,混合动力以及纯电动车型(BMW X7、X6、X5、X3、8系、7系、6系、5系、4系、3系,纯电动BMW iX3)。
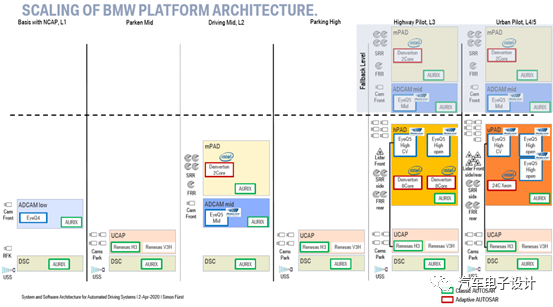
图1 BMW从L1~L2架构是标配化设置
这套自动驾驶辅助系统Pro是包含不同的辅助功能,主动式巡航定速,城市拥堵,高速巡航,变道辅助、前向碰撞预警及紧急制动辅助、车道纠偏辅助,其中L2的定义是交通拥堵辅助功能(这套系统的延展,就是在城市,高速,环路等各种道路,L2级别自动驾驶技术在拥堵路况,低速行驶以及畅通高速行驶过程的实际特性)。在这里比较有意思的是,BMW针对未来延展L3开发了一套紧急停车辅助的机制,按照这个辅助的设计,基于L3的可以用这套Fall Back的机制来实现在L3模式检测到问题之后的紧急辅助停车。
图2 这套Fall Back的机制将会让L3能够部署到高速公路上
目前这套系统是基于分布式环境感知(超声传感器,摄像头和雷达)并协调各个传感器生成的数据,融合的感知数据,如下所示:
12个超声波传感器,主要用于泊车辅助系统。
8个摄像头,主要用于捕捉影像进行图像识别。
4个短距离毫米波雷达,主要用于相邻车道的探测。
1个全距离毫米波雷达,主要用于车辆前方区域行驶车辆以及障碍物的探测。
图3 传感器配置
图4 整车传感器的配置
在原有的配置上,加入一个mPAD来统筹前向的行驶功能,这个一定程度上起到了衔接之前的配置的作用。
图5 整车系统里面的组件
在这套L2级别的自动驾驶辅助系统Pro,驾驶员的监控是核心,一方面使用了驾驶员注意力监控系统,红外线摄像头安装于方向盘后方仪表盘位置,当交通拥堵辅助功能启动的情况下,摄像头将监控驾驶员双眼,当监控系统发现驾驶员视线离开前方交通道路时,交通拥堵辅助功能会退出,同时系统会给予驾驶员视觉和听觉提醒,这时驾驶员需及时接管车辆。车辆装配电容感应式方向盘,领先的电容传感技术替代传统的物理扭矩感知方向盘,可精准探测驾驶员对于方向盘的控制状态。目前大家的做法,都是在L2上面逐步配置多一点的检测,和驾驶员当时的状态进行博弈。
图6 其实手有没有在方向盘这个事费了很大的功夫
小结:我个人觉得,目前电动汽车的销售还是要定位突出,在续航、加速和其他特性趋同下,智能化的座舱系统是大家比拼的第一步,第二步就是目前大家都在做的自动驾驶方面,这块L2+过渡到L3是逐步的方向。责任编辑:haq
-
电动汽车
+关注
关注
156文章
12718浏览量
237482 -
自动驾驶
+关注
关注
795文章
15073浏览量
182075 -
辅助驾驶系统
+关注
关注
5文章
95浏览量
17512
发布评论请先 登录
麦格纳张超出席2026智能电动汽车发展高层论坛
自动驾驶汽车如何探测路面的积水深度?

自动驾驶汽车如何实现自动驾驶



汽车自动驾驶的太阳光模拟应用研究

“汽车智能化” 和 “家电高端化”
如何确保自动驾驶汽车感知的准确性?

塑造自动驾驶汽车格局的核心技术
电动汽车用异步电动机混合控制系统的研究
太阳光模拟器 | 在汽车自动驾驶开发中的应用
数据驱动自动驾驶:核心要素与发展全景解析

低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?

自动驾驶汽车是如何准确定位的?

英飞凌BMS解决方案推动电动汽车创新




评论