 基于MLX90316器件执行角位置提取的输出电平后端校准
基于MLX90316器件执行角位置提取的输出电平后端校准

本应用笔记描述了由MLX90316器件执行的角位置提取(弧形插值)之后的输出电平的后端校准。
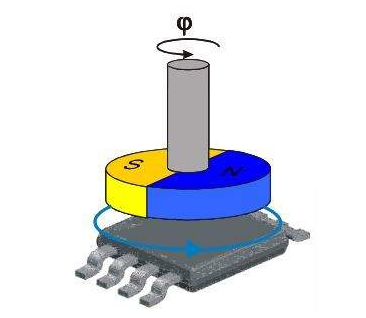
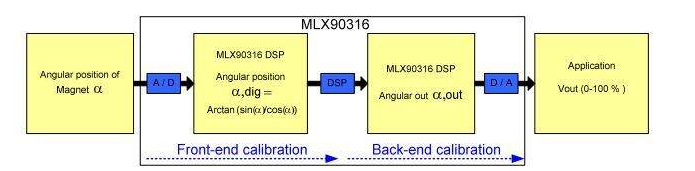
如图1和图2所示,如果磁体(径向磁化)在MLX90316上方旋转,则三轴霍尔板会提供两个正交信号余弦(α)和正弦(α)。参见MLX90316的前端校准应用笔记),将它们转换为角度αdig。=反正切(正弦/余弦)。
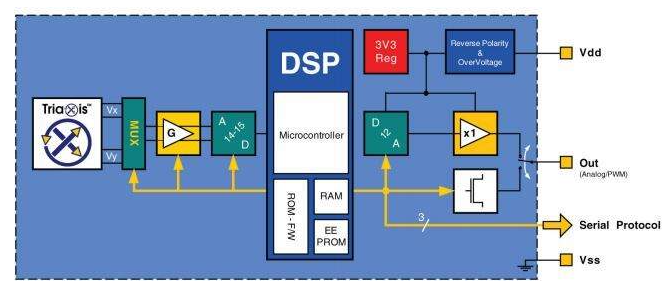
在DSP内进行进一步处理,以将计算出的α,dig转换为输出值α,out,包括对零位或不连续点,旋转方向和角度范围的补偿。
然后,将计算出的输出以数字形式作为PWM信号/与SPI兼容的串行接口给出,或者通过模拟输出信号进行模拟输出。
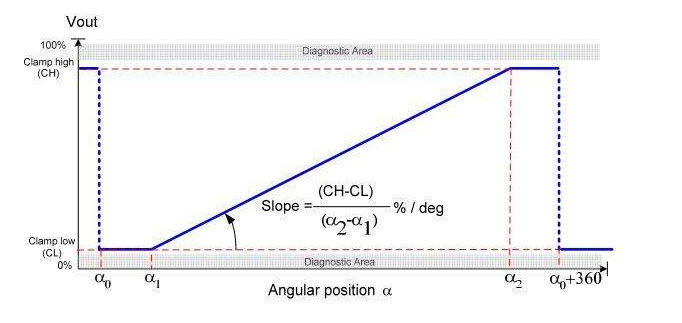
从图4可以看出,α1和α2之间的机械输入角度范围被线性转换为0-100%之间的输出水平。MLX90316具有一个EEPROM,用于存储与芯片功能和输出特性相关的所有必要参数(即α0,α1,α2,CH,CL,…),从而可以调整输出曲线特性。
后端校准:减少误差
失调,相位和幅度主要在IC级别上进行修整和补偿(请参见MLX90316前端校准的应用笔记),而理想情况下,可以通过补偿来补偿由于离轴,倾斜和磁误差引起的整体应用线性误差。输出传递特性的线性化。
结果
在补偿了点A,B的前端和后端误差之后,我们最终具有以下特征:选择DP点,以使夹紧下部区域和夹紧上部区域的大小相等(= 135度)注意:不包括噪声和热误差。
自动增益控制
为了获得最佳的信噪比,必须在磁体的磁通密度变化时调整增益。磁通密度的变化与气隙变化和温度变化有关。90316的微控制器将自动检查半径(= sqrt(sin ^ 2 + cos ^ 2)),如果半径不是ADC范围的90%,则更改增益。
放大器增益由两个增益级构成:粗增益和精增益。下图显示了16个粗增益x 64个细增益值和相应的可用磁场的所有可能组合。精细增益将主要补偿由温度变化引起的磁通密度的微小变化,而如果精细增益已达到极限,则粗增益以步长1增大或减小。
编辑:hfy
-
dsp
+关注
关注
561文章
8275浏览量
368265 -
放大器
+关注
关注
146文章
14362浏览量
222503 -
PWM
+关注
关注
116文章
5894浏览量
226589 -
SPI
+关注
关注
17文章
1900浏览量
102129
发布评论请先 登录
步进电机的位置控制与速度控制

如何校准可编程直流电源的精度

关于功率器件的热电偶测量位置指南
探索英飞凌TLE4802:汽车角位置感应的理想之选
Infineon TLE4801:汽车角位置感应的理想选择
深入解析TLE4803:汽车角位置感应的理想之选
PIHER PSRC - 2P非接触式角位置传感器:工业与车辆领域的理想之选
功率分析仪测量暂态过电压时的精度如何校准?
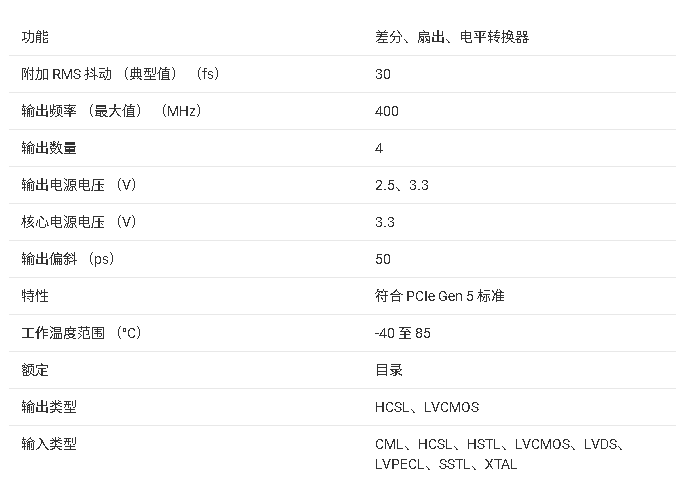
LMK00334四输出时钟缓冲器与电平转换器技术文档总结
如何理解芯片设计中的后端布局布线
求助,关于ST的IMU和地磁计用motionfx库融合后航向角异常的问题求解
【RA-Eco-RA4M2开发板评测】 基于MLX90614的红外测温(一)
Melexis的MLX90427更安全,更可靠,性能更高且成本更低




评论