 基于MPU6050传感器的手势控制机械臂
基于MPU6050传感器的手势控制机械臂

机械臂是引人入胜的工程创作之一,看着这些东西倾斜和摇动像人类的手臂一样完成复杂的事情总是令人着迷。这些机械臂可以在装配线中进行焊接、钻孔、喷漆等剧烈机械工作的行业中找到,最近还开发了高精度的先进机械臂来执行复杂的外科手术。在之前的文章中,我们3D打印了机械臂,并使用MG995伺服电机制作了机械臂。我们将再次使用相同的3D打印机器人手臂,通过Arduino Nano、MPU6050陀螺仪和弯曲(Flex)传感器制作手势控制的机器人手臂。
通过3D打印的机械臂位置可以通过与MPU6050陀螺仪和弯曲传感器相连的手套来控制。 Flex传感器用于控制机械手的夹具伺服电机,MPU6050用于在X和Y轴上移动机器人。如果您没有打印机,那么您也可以像为Arduino机器人手臂项目建造的那样,用简单的纸板制作手臂。
首先,让我们先了解MPU6050传感器和弯曲传感器。
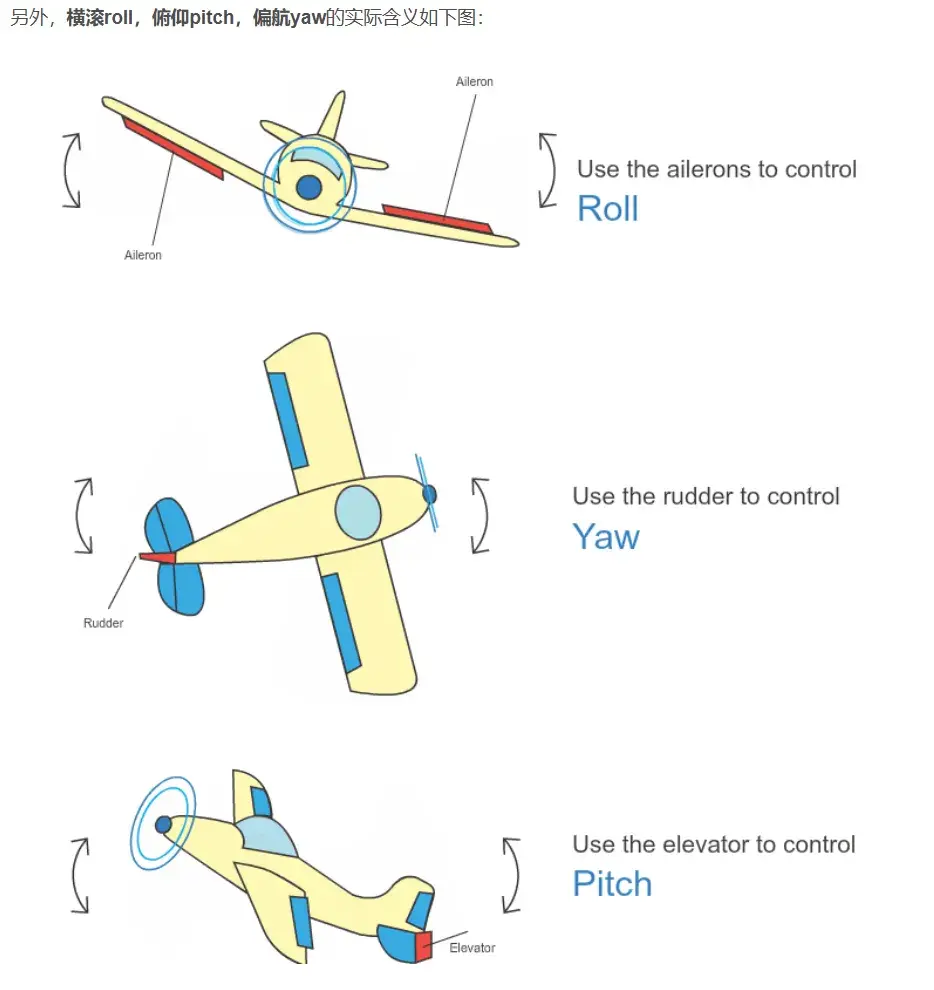
MPU6050陀螺仪和加速度计传感器
MPU6050基于微机械系统(MEMS)技术。该传感器具有一个3轴加速度计、一个3轴陀螺仪和内置温度传感器。它可以用来测量诸如加速度、速度、方向、位移等参数。我们之前已经将MPU6050与Arduino和Raspberry pi进行了连接,并且还使用它构建了一些项目,例如自平衡机器人、Arduino数字量角器和Arduino测斜仪。
MPU6050传感器的功能:
● 输入电源:3-5Vd
● 内置16位ADC提供高精度
● 内置DMP提供高计算能力
● 可用于与磁力计等其他I2C设备接口
● 内置温度传感器
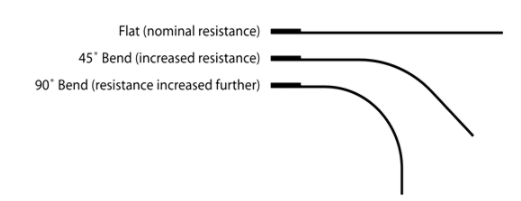
弯曲传感器
弯曲传感器实际上是一个可变电阻器。弯曲传感器时,它的电阻会发生变化。通常有2.2英寸和4.5英寸两种尺寸。
为什么我们在项目中使用柔性传感器?在此手势控制的机械臂中,使用弯曲传感器控制机械臂的抓取器。当手套上的弯曲传感器弯曲时,安装在夹具上的伺服电机旋转,夹具打开。
准备好3D打印的机械臂
本文中使用的3D打印机械手是根据ThinZverse中EEZYbotARM提供的设计制作的。 Thingiverse链接中提供了制作3D打印机械臂和带有视频的组装细节的完整过程,该链接在上方共享。
上图是组装4台伺服电机后3D打印的机械臂的图像。
所需的组件
● Arduino Nano开发板
● 弯曲传感器
● 10k电阻
● MPU6050
● 连接线
● 面包板
电路原理图
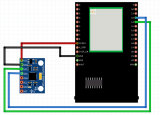
下图显示了基于Arduino的手势控制机械臂的电路连接。
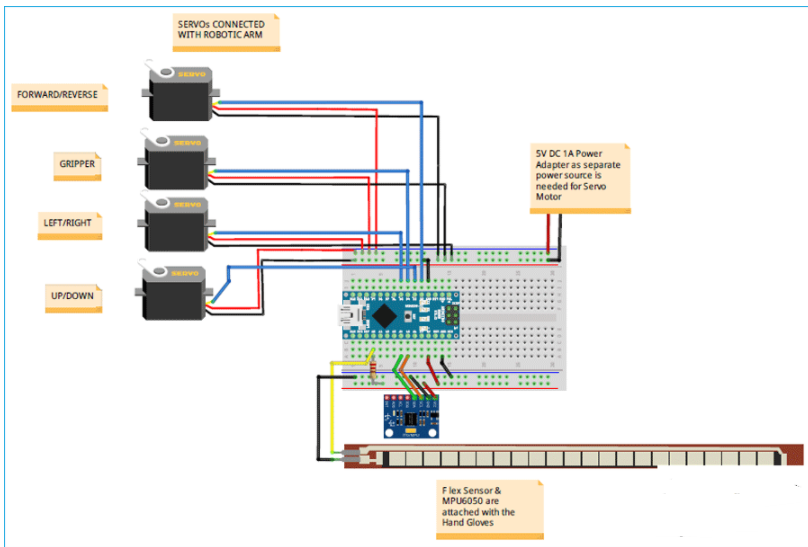
MPU6050和Arduino Nano之间的电路连接:
| MPU6050 | Arduino Nano |
| VCC | +5V |
| GND | GND |
| SDA | A4 |
| SCL | A5 |
弯曲传感器包含两个引脚。它不包含极性端子。因此,第一个引脚P1通过一个10k的上拉电阻连接到Arduino Nano的模拟引脚A0,第二个引脚P2接地到Arduino。
将MPU6050和Flex传感器安装到手套上
我们将MPU6050和Flex传感器安装在手套上。此处,通过线缆连接手套和机械臂,也可以通过使用RF连接或蓝牙连接将其无线连接。
连接完成后,手势控制机械臂的最终设置如下图所示:
为机械臂编程Arduino Nano
本文的末尾提供了完整的代码。这里解释了一些重要的代码。
首先,包括必要的库文件。 Wire.h库用于Arduino Nano和MPU6050与Servo.h之间的I2C通信,以控制伺服电机。
#include
#include
接下来,声明用于类伺服的对象。当我们使用四个伺服电动机时,将创建四个对象。
Servo servo_1;
Servo servo_2;
Servo servo_3;
Servo servo_4;
接下来,声明MPU6050的I2C地址和要使用的变量。
const int MPU_addr=0x68; //MPU6050 I2C Address
int16_t axis_X,axis_Y,axis_Z;
int minVal=265;
int maxVal=402;
double x;
double y;
double z;
在void setup()函数中,将串行通信的波特率设置为9600。
Serial.begin(9600);
并在Arduino Nano和MPU6050之间建立了I2C通信:
Wire.begin(); //Initilize I2C Communication
Wire.beginTransmission(MPU_addr);//Start communication with MPU6050
Wire.write(0x6B); //Writes to Register 6B
Wire.write(0); //Writes 0 into 6B Register to Reset
Wire.endTransmission(true); //Ends I2C transmission
另外,为伺服电机连接定义了四个PWM引脚。
servo_1.attach(2); // Forward/Reverse_Motor
servo_2.attach(3); // Up/Down_Motor
servo_3.attach(4); // Gripper_Motor
servo_4.attach(5); // Left/Right_Motor
接下来,在void loop函数中,再次在MPU6050和Arduino Nano之间建立I2C连接,然后开始从MPU6050的寄存器读取X、Y、Z轴数据并将它们存储在相应的变量中。
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); //Start with regsiter 0x3B
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true);//Read 14 Registers
axis_X=Wire.read()<<8|Wire.read();
axis_Y=Wire.read()<<8|Wire.read();
axis_Z=Wire.read()<<8|Wire.read();
然后,将MPU6050传感器的轴数据的最小值和最大值映射在-90到90的范围内。
int xAng = map(axis_X,minVal,maxVal,-90,90);
int yAng = map(axis_Y,minVal,maxVal,-90,90);
int zAng = map(axis_Z,minVal,maxVal,-90,90);
然后使用以下公式以0到360的形式计算x,y,z值。
x= RAD_TO_DEG * (atan2(-yAng, -zAng)+PI);
y= RAD_TO_DEG * (atan2(-xAng, -zAng)+PI);
z= RAD_TO_DEG * (atan2(-yAng, -xAng)+PI);
然后在Arduino Nano的A0引脚上读取挠曲传感器的模拟输出数据,并根据弯曲传感器的数字值设置夹具的伺服角度。因此,如果弯曲传感器数据大于750,则夹具的伺服电机角度为0度,如果小于750,则为180度。
int gripper;
int flex_sensorip = analogRead(A0);
if(flex_sensorip > 750)
{
gripper = 0;
}
else
{
gripper = 180;
}
servo_3.write(gripper);
然后,将MPU6050在X轴上从0到60的移动映射为0到90度,以实现伺服电机的机械臂正向/反向运动。
if(x >=0 && x <= 60)
{
int mov1 = map(x,0,60,0,90);
Serial.print("Movement in F/R = ");
Serial.print(mov1);
Serial.println((char)176);
servo_1.write(mov1);
}
MPU6050在X轴上从250到360的运动被映射为0到90度,用于伺服电机的上/下运动机械手。
使用Arduino进行手势控制的机械臂的工作
最后,将代码上传到Arduino Nano,并戴上MPU6050和弯曲传感器安装的手套。
现在,向下移动手以使机械臂向前移动,向上移动以使机械臂向上移动。然后向左或向右倾斜手,以向左或向右旋转机械手。弯曲手打开夹持器,然后松开以使其闭合。
编辑:hfy
-
传感器
+关注
关注
2578文章
55848浏览量
795557 -
加速度计
+关注
关注
6文章
827浏览量
48384 -
MPU6050
+关注
关注
39文章
313浏览量
77595
发布评论请先 登录
一文读懂手势识别传感器:原理、优势与应用场景

为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
STM32驱动PAJ7620手势识别传感器
CW32L012读取MPU6050姿态数据

用dma加iic读取mpu6050数据遇到的疑问求解
泰科电子商用车机械自动变速器传感器集群介绍
TT电机,Arduino Uno,L298N 5AD ,MPU6050最简自平衡机器人资料
选择合适的MEMS振动传感器?

【RA4M2-SENSOR】串口传输MPU6050陀螺仪数据测评
创想智控焊缝跟踪+发那科机器人实现工程机械臂架焊接智能化升级
协作机械臂产品介绍
无位置传感器控制的双电机驱动系统性能研究
小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据
触觉传感器已在亚马逊仓储机械臂率先商用 新增形式有望加速市场增长节奏




评论