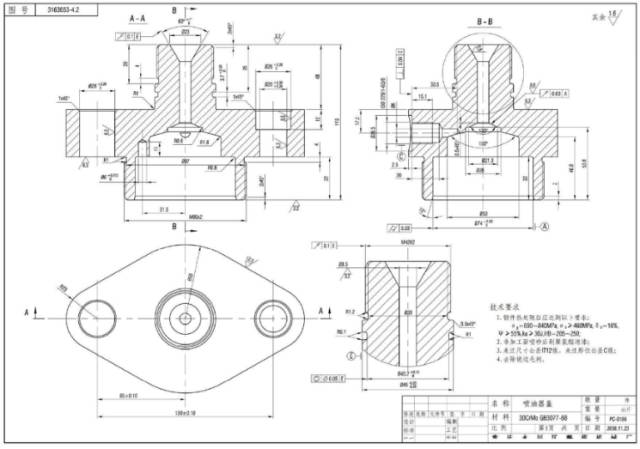
 机械图纸技术要求汇总,机械人必备资料
机械图纸技术要求汇总,机械人必备资料

机械图纸技术要求汇总,机械人必备资料,记得收藏!
▌一般技术要求
1. 零件去除氧化皮。
2. 零件加工表面上,不应有划痕、擦伤等损伤零件表面的缺陷。
3. 去除毛刺飞边。
▌热处理要求
1. 经调质处理,HRC50~55。
2. 零件进行高频淬火,350~370℃回火,HRC40~45。
3. 渗碳深度0.3mm。
4. 进行高温时效处理。
▌公差要求
1. 未注形状公差应符合GB1184-80的要求。
2. 未注长度尺寸允许偏差±0.5mm。
3. 铸件公差带对称于毛坯铸件基本尺寸配置。
▌零件棱角
1. 未注圆角半径R5。
2. 未注倒角均为2×45°。
3. 锐角/尖角/锐边倒钝。
▌装配要求
1. 各密封件装配前必须浸透油。
2. 装配滚动轴承允许采用机油加热进行热装,油的温度不得超过100℃。
3. 齿轮装配后,齿面的接触斑点和侧隙应符合GB10095和GB11365的规定。
4. 装配液压系统时允许使用密封填料或密封胶,但应防止进入系统中。
5. 进入装配的零件及部件(包括外购件、外协件),均必须具有检验部门的合格证方能进行装配。
6. 零件在装配前必须清理和清洗干净,不得有毛刺、飞边、氧化皮、锈蚀、切屑、油污、着色剂和灰尘等。
7. 装配前应对零、部件的主要配合尺寸,特别是过盈配合尺寸及相关精度进行复查。
8. 装配过程中零件不允许磕、碰、划伤和锈蚀。
9. 螺钉、螺栓和螺母紧固时,严禁打击或使用不合适的旋具和扳手。紧固后螺钉槽、螺母和螺钉、螺栓头部不得损坏。
10. 规定拧紧力矩要求的紧固件,必须采用力矩扳手,并按规定的拧紧力矩紧固。
11. 同一零件用多件螺钉(螺栓)紧固时,各螺钉(螺栓)需交叉、对称、逐步、均匀拧紧。
12. 圆锥销装配时应与孔应进行涂色检查,其接触率不应小于配合长度的60%,并应均匀分布。
13. 平键与轴上键槽两侧面应均匀接触,其配合面不得有间隙。
14. 花键装配同时接触的齿面数不少于2/3,接触率在键齿的长度和高度方向不得低于50%。
15. 滑动配合的平键(或花键)装配后,相配件移动自如,不得有松紧不均现象。
16. 粘接后应清除流出的多余粘接剂。
17. 轴承外圈与开式轴承座及轴承盖的半圆孔不准有卡住现象。
18. 轴承外圈与开式轴承座及轴承盖的半圆孔应接触良好,用涂色检查时,与轴承座在对称于中心线120°、与轴承盖在对称于中心线90°的范围内应均匀接触。在上述范围内用塞尺 检查时,0.03mm的塞尺不得塞入外圈宽度的1/3。
19. 轴承外圈装配后与定位端轴承盖端面应接触均匀。
20. 滚动轴承装好后用手转动应灵活、平稳。
21. 上下轴瓦的结合面要紧密贴和,用0.05mm塞尺检查不入。
22. 用定位销固定轴瓦时,应在保证瓦口面和端面与相关轴承孔的开合面和端面包持平齐状态下钻铰、配销。销打入后不得松动。
23. 球面轴承的轴承体与轴承座应均匀接触,用涂色法检查,其接触不应小于70%。
24. 合金轴承衬表面成黄色时不准使用,在规定的接触角内不准有离核现象,在接触角外的离核面积不得大于非接触区总面积的10%。
25. 齿轮(蜗轮)基准端面与轴肩(或定位套端面)应贴合,用0.05mm塞尺检查不入。并应保证齿轮基准端面与轴线的垂直度要求。
26. 齿轮箱与盖的结合面应接触良好。
27. 组装前严格检查并清除零件加工时残留的锐角、毛刺和异物。保证密封件装入时不被擦伤。
▌铸件要求
1. 铸件表面上不允许有冷隔、裂纹、缩孔和穿透性缺陷及严重的残缺类缺陷(如欠铸、机械损伤等)。
2. 铸件应清理干净,不得有毛刺、飞边,非加工表明上的浇冒口应清理与铸件表面齐平。
3. 铸件非加工表面上的铸字和标志应清晰可辨,位置和字体应符合图样要求。
4. 铸件非加工表面的粗糙度,砂型铸造R,不大于50μm。
5. 铸件应清除浇冒口、飞刺等。非加工表面上的浇冒口残留量要铲平、磨光,达到表面质量要求。
6. 铸件上的型砂、芯砂和芯骨应清除干净。
7. 铸件有倾斜的部位、其尺寸公差带应沿倾斜面对称配置。
8. 铸件上的型砂、芯砂、芯骨、多肉、粘沙等应铲磨平整,清理干净。
9. 对错型、凸台铸偏等应予以修正,达到圆滑过渡,一保证外观质量。
10. 铸件非加工表面的皱褶,深度小于2mm,间距应大于100mm。
11. 机器产品铸件的非加工表面均需喷丸处理或滚筒处理,达到清洁度Sa2 1/2级的要求。
12. 铸件必须进行水韧处理。
13. 铸件表面应平整,浇口、毛刺、粘砂等应清除干净。
14. 铸件不允许存在有损于使用的冷隔、裂纹、孔洞等铸造缺陷。
▌涂装要求
1. 所有需要进行涂装的钢铁制件表面在涂漆前,必须将铁锈、氧化皮、油脂、灰尘、泥土、盐和污物等除去。
2. 除锈前,先用有机溶剂、碱液、乳化剂、蒸汽等除去钢铁制件表面的油脂、污垢。
3. 经喷丸或手工除锈的待涂表面与涂底漆的时间间隔不得多于6h。
4. 铆接件相互接触的表面,在连接前必须涂厚度为30~40μm防锈漆。搭接边缘应用油漆、腻子或粘接剂封闭。由于加工或焊接损坏的底漆,要重新涂装。
▌配管要求
1. 装配前所有的管子应去除管端飞边、毛刺并倒角。用压缩空气或其他方法清楚管子内壁附着的杂物和浮锈。
2. 装配前,所有钢管(包括预制成型管路)都要进行脱脂、酸洗、中和、水洗及防锈处理。
3. 装配时,对管夹、支座、法兰及接头等用螺纹连接固定的部位要拧紧,防止松动。
4. 预制完成的管子焊接部位都要进行耐压试验。
5. 配管接替或转运时,必须将管路分离口用胶布或塑料管堵封口,防止任何杂物进入,并拴标签。
▌补焊件要求
1. 焊接前必须将缺陷彻底清除,坡口面应修的平整圆滑,不得有尖角存在。
2. 根据铸钢件缺陷情况,对焊接区缺陷可采用铲挖、磨削,炭弧气刨、气割或机械加工等方法清除。
3. 焊接区及坡口周围20mm以内的粘砂、油、水、锈等脏物必须彻底清理。
4. 在焊接的全过程中,铸钢件预热区的温度不得低于350°C。
5. 在条件允许的情况下,尽可能在水平位置施焊。
6. 补焊时,焊条不应做过大的横向摆动。
7. 铸钢件表面堆焊接时,焊道间的重叠量不得小于焊道宽度的1/3。焊肉饱满,焊接面无烧伤,裂纹和明显的结瘤。焊缝外观美观,无咬肉、加渣、气孔、裂纹、飞溅等缺陷;焊波均匀。
▌锻件要求
1. 锭的水口、冒口应有足够的切除量,一以保证锻件无缩孔和严重的偏折。
2. 锻件应在有足够能力的锻压机上锻造成形,以保证锻件内部充分锻透。
3. 锻件不允许有肉眼可见的裂纹、折叠和其他影响使用的外观缺陷。局部缺陷可以清除,但清理深度不得超过加工余量的75%,锻件非加工表面上的缺陷应清理干净并圆滑过渡。
4. 锻件不允许存在白点、内部裂纹和残余缩孔。
▌切削加工件要求
1. 零件应按工序检查、验收,在前道工序检查合格后,方可转入下道工序。
2. 加工后的零件不允许有毛刺。
3. 精加工后的零件摆放时不得直接放在地面上,应采取必要的支撑、保护措施。加工面不允许有锈蛀和影响性能、寿命或外观的磕碰、划伤等缺陷。
4. 滚压精加工的表面,滚压后不得有脱皮现象。
5. 最终工序热处理后的零件,表面不应有氧化皮。经过精加工的配合面、齿面不应有退火。
6. 加工的螺纹表面不允许有黑皮、磕碰、乱扣和毛刺等缺陷。
-
零件
+关注
关注
1文章
123浏览量
15427 -
液压系统
+关注
关注
12文章
175浏览量
16773 -
机械图
+关注
关注
0文章
6浏览量
7145
原文标题:机械人必备的图纸技术要求大全,建议收藏
文章出处:【微信号:AMTBBS,微信公众号:世界先进制造技术论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
复合机器人机械结构设计与创新:智能制造的前沿技术与发展趋势

变频器1拖2对电机和机械的要求

快讯 | 东舟技术喜获2025年度机械工业科学技术奖
湃睿科技荣获2025年度机械工业科学技术奖

复合机器人对比传统AGV和机械臂的优势何在?

创想智控焊缝跟踪+发那科机器人实现工程机械臂架焊接智能化升级
英创汇智推出符合新国标要求的EMB电子机械制动系统

倍加福IMU F99在工程机械和农用机械中的应用案例
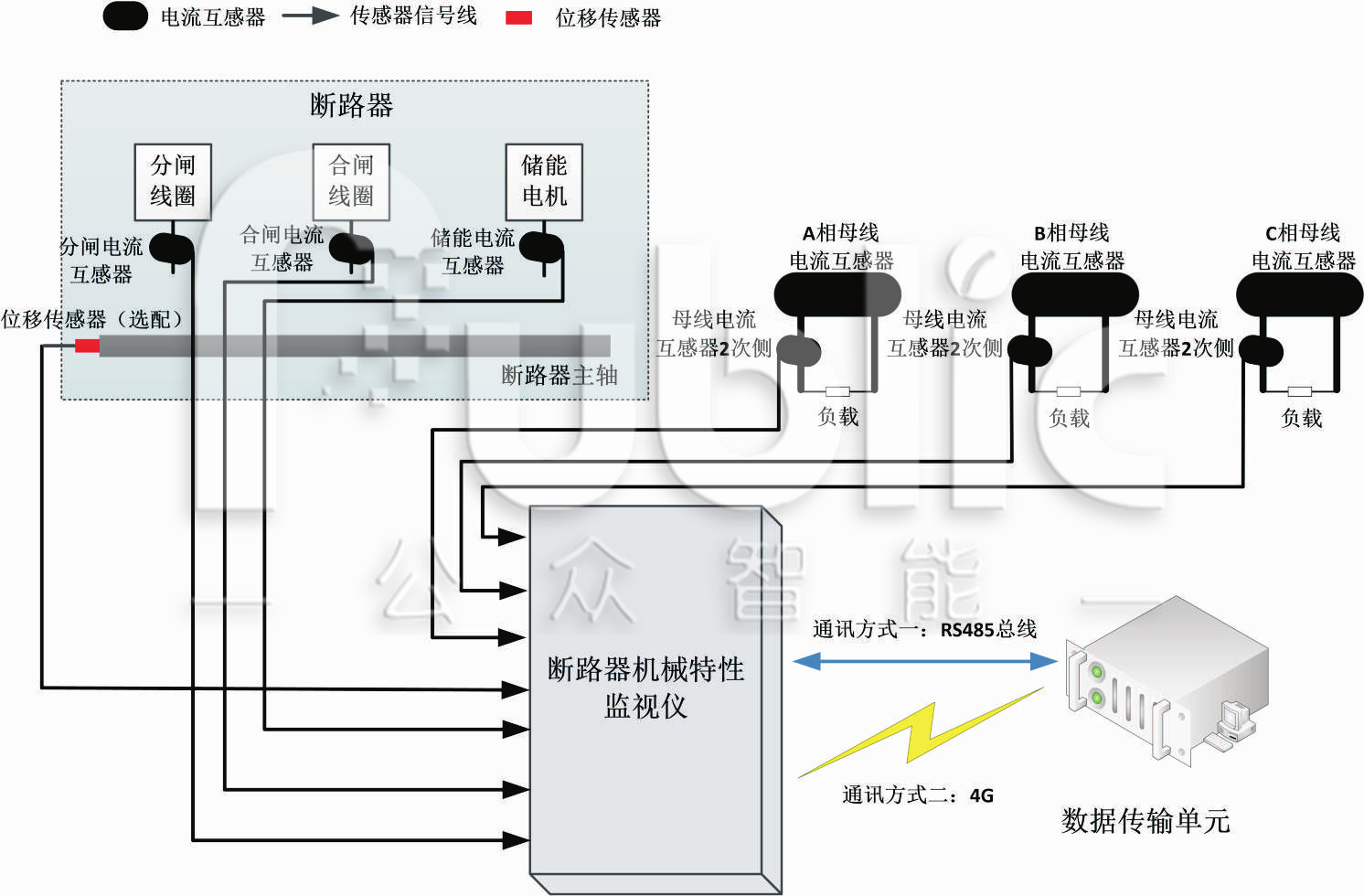
断路器机械特性监测技术
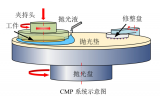
深度解析芯片化学机械抛光技术




评论