 研发人员利用液晶弹性体设计了一种自动折叠机器人
研发人员利用液晶弹性体设计了一种自动折叠机器人

近日,加州大学圣地亚哥分校研发人员利用液晶弹性体设计了一种自动折叠机器人。
据悉,它能抬起比自身重38倍的物体,研究人员叫它起重机,加热时会像人造肌肉一样收缩,可以叠成了不同的形状。若将三个起重机逐一收缩,连起来就变成了一款爬行机器人。
液晶弹性体是一种轻微交联的液晶聚合物网络。在磁场、电场、温度或预拉伸的影响下能够进行可逆的变形。由于它们的致动特性,液晶弹性体常常被用来制作软机器人或人造肌肉,研究人员选择用加热的方式驱动液晶弹性体,利用光刻技术将加热层嵌入了液晶弹性体中。“起重机”的折叠结构是一种称为Sarrus联动的机制,可以使单个驱动肌肉可以在两个方向上折叠。图中红色和蓝色的箭头分别表示致动器的加热和冷却状态。当液晶弹性体被加热时,致动器处于弹出状态;材料被冷却后,致动器自动缩回扁平状。起重机的收缩与液晶弹性体的加热时间有关,研究人员发现,当加热到30s左右,材料的应变能力达到峰值,‘起重机’完全展开,折叠角最大为64°;当加热停止时,液晶弹性体开始立刻松弛,但要达到完全松弛状态需要2分钟。
起重机的负重能力随温度的增加而增加。在启动状态,眨眼间便可抬起20g的负载。研究人员预测它的最大负载能力可达到700g,未来可应用于搜救,航空航天系统和医疗设备中。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31444浏览量
223669 -
液晶
+关注
关注
6文章
627浏览量
71383 -
软机器人
+关注
关注
0文章
26浏览量
7251
原文标题:加州大学研发自动折叠机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人在每毫秒都能“感知”到自己被推、拉或碰到东西。
正是这种连续、精准的力觉反馈,让机器人实现了三大关键能力:
1. 柔顺控制:像人手一样“顺着来”
传统
发表于 04-17 17:27
高压放大器如何成为介电弹性体驱动的能量心脏
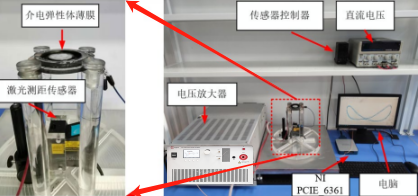
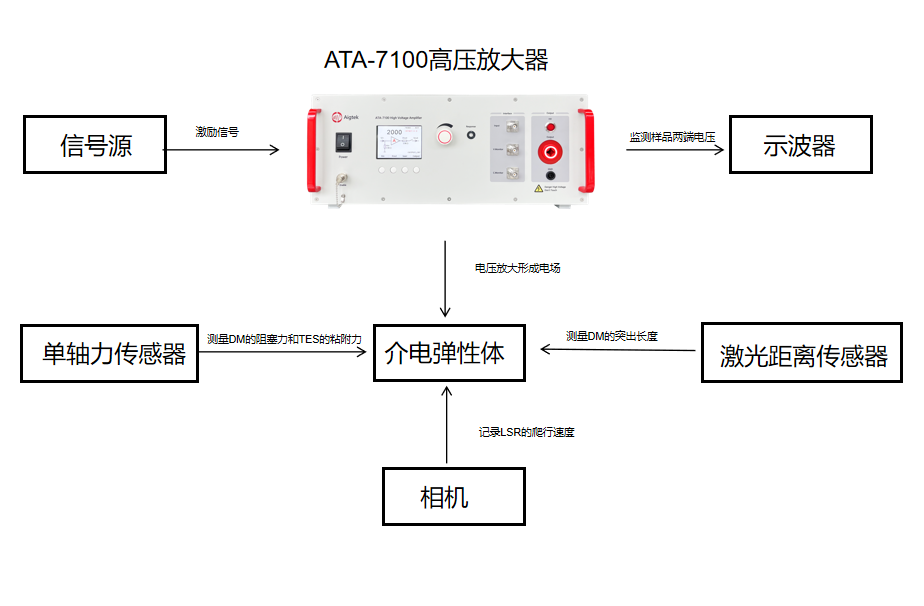
介电弹性体被誉为有前途的“人工肌肉”材料,其工作原理类似于三明治结构:上下两层柔性电极,中间夹着一层高分子弹性体薄膜。当通过高压放大器对电极施加电压时,正负电荷在上下表面积累,产生的静电力挤压弹性体薄膜,使其在厚度方向压缩、平面

高压放大器在介电弹性体驱动器性能测试中的应用
实验名称: 介电弹性体驱动器性能测试 研究方向: 为了减轻介电弹性体驱动器中的蝶形迟滞特性与蠕变特性,本文提出了一个新型针对带有蠕变特性的蝶形迟滞隐逆补偿输出反馈控制算法。隐逆补偿算法是一种
高压放大器在介电弹性体软体机器人中的应用
赋予了更多使命,但刚性机器人的高度发展无法满足所有应用需求,脆弱的结构与笨重的体型使得它们的应用受到环境的限制。近年来软体机器人的不断发展使得这一劣势足以弥补,为了满足刚性

高压放大器在介电弹性体制成的软机器人研究中的应用
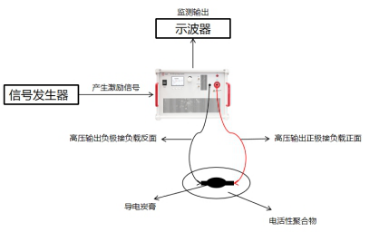
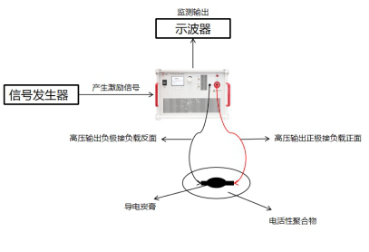
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了一种受水蛭启发的摩擦电
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
高压放大器如何赋能下一代介电弹性体应用
高压放大器在介电弹性体研究中扮演着非常重要的角色,它如同整个实验系统的“能量引擎”,负责将微弱的控制信号精确放大至驱动介电弹性体形变所需的高压电场,是连接控制指令与物理形变的关键桥梁。 图:机器人

小萝卜机器人的故事
屏代替,
LED,
有大佬感兴趣,
一起关注和讨论代码,
这个机器人知名度不高,
可是是机器人的原型,
如果开放接口,
定位和无线充电,
也不失为未来的礼物。
让我们为小萝卜工程师的,
自掏腰包救萝卜
发表于 10-23 05:24
ATA-7000系列高压放大器,赋能介电弹性体研究实验新突破!
介电弹性体被认为是最有前途的“人工肌肉”材料,广泛应用于软体机器人、智能假肢、触觉传感器、盲文显示、光学器件、航空航天以及能量收集等领域。介电弹性体的工作原理主要基于其压电效应和介电特性,将输入信号
安泰电子40kV高压放大器助力介电弹性体实验实现新突破
介电弹性体被认为是最有前途的“人工肌肉”材料,广泛应用于软体机器人、智能假肢、触觉传感器、盲文显示、光学器件、航空航天以及能量收集等领域。介电弹性体的工作原理主要基于其压电效应和介电特性,将输入信号
基于MT6816单芯片磁编码的机器人关节模组一体化设计
随着机器人技术的快速发展,关节模组的性能直接决定了机器人的运动精度和响应速度。传统的光电编码器虽然精度较高,但在抗污染、抗振动等方面存在明显短板。本文将详细介绍一种基于MT6816单芯
键盘薄膜高弹UV胶则是一种特殊改性的UV固化胶,用于薄膜键盘按键弹性体的部分或高弹性密封
薄膜键盘是一种常见的键盘类型,它使用薄膜作为按键的触发器。而键盘薄膜高弹UV胶则是一种特殊改性的UV固化胶,用于薄膜键盘按键弹性体的部分或高弹性密封。薄膜键盘的优点如下:1.薄膜键盘相

介电弹性体软机器人研究:高压放大器的应用实践
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了一种受水蛭启发的摩擦电

高压放大器驱动介电弹性体可以做哪些实验
介电弹性体被认为是最有前途的“人工肌肉”材料,广泛应用于软体机器人、智能假肢、触觉传感器、盲文显示、光学器件、航空航天以及能量收集等领域。介电弹性体的工作原理主要基于其压电效应和介电特性,将输入信号



评论