 机器人原始程序布局状态与改进后的布局状态
机器人原始程序布局状态与改进后的布局状态

原始程序布局状态
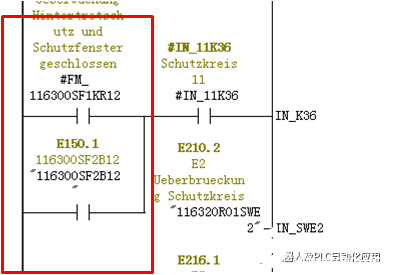
改进后的布局状态:
1.将机器人E14机器人安全加入光电及升降门信号。
2.机器人安全门回路加入光电和升降门信号。
3.误闯光电会引起工作组1报安全门故障。
1.将机器人E14机器人安全加入光电及升降门信号。
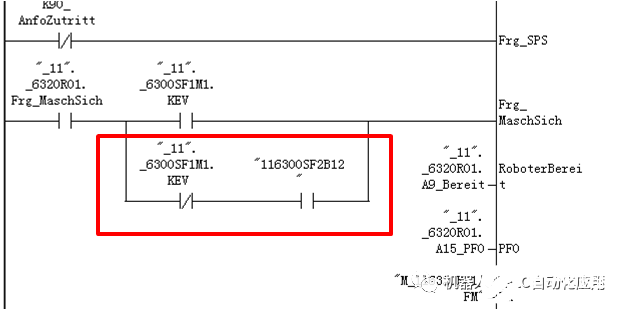
编程速度快,改动最小,影响范围小,安全系数低。
2.机器人安全门回路加入光电和升降门信号。
打开升降门后,如果挡光电会引起机器人2号的安全门回路断开,使机器人以安全停止1的方式停止。
相对1的解决方案,这个方案的安全系数更高,完全控制了2 号机器人,但当人员跨过新加光栅后,3号/4号机器人仍然在运动,还是有一定的安全风险。
3.误闯光电会引起工作组1报安全门故障。
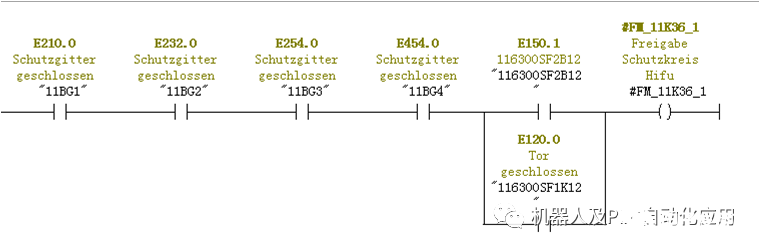
并入安全门控制回路,如果开着升降门直接闯过光栅,将使整个工作组1停止产生安全门开故障。
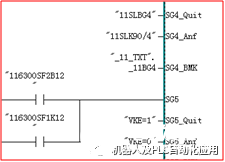
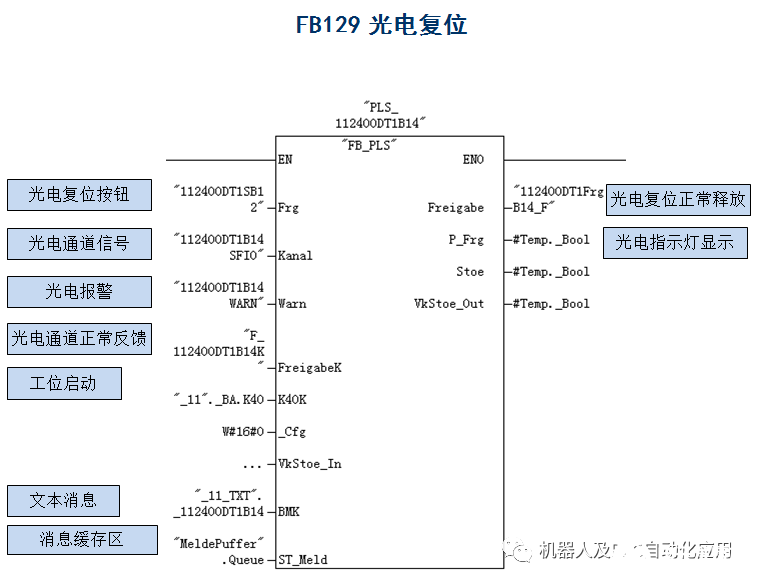
光电复位示意图:
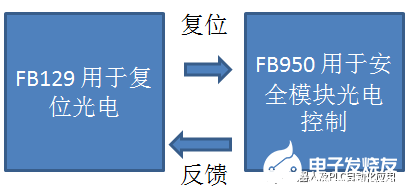
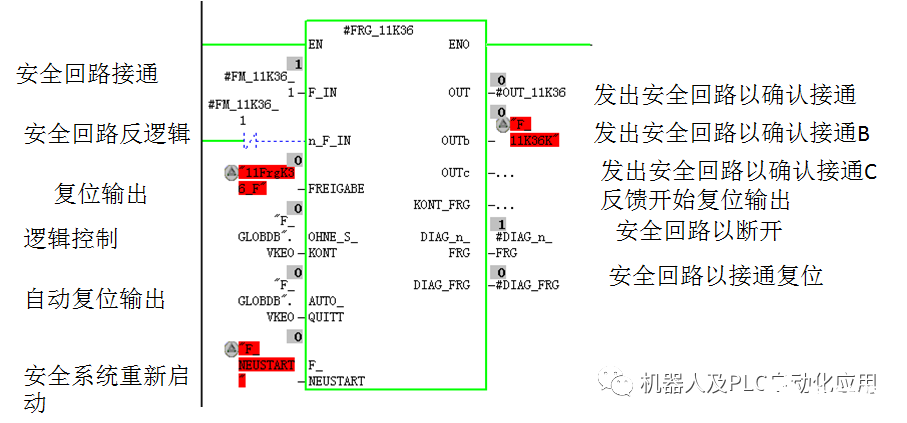
FB950接口设置
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31494浏览量
223795 -
光电
+关注
关注
8文章
861浏览量
83232 -
回路
+关注
关注
0文章
73浏览量
12651
发布评论请先 登录
相关推荐
热点推荐
荣耀机器人散热系统介绍
机器人生死的核心系统。一、散热系统在机器人中的核心定位在机器人的物理结构中,散热系统并非独立部件,而是一个集成式的热管理网络,它与动力层、能源层深度绑定:位置布局:

为什么机器人连接器成为新风口?步步精科技的战略布局解析
在人工智能与具身智能快速发展的背景下,机器人产业正迎来前所未有的增长机遇。从工业机器人到人形机器人,再到服务机器人与智能终端,行业正加速迈向规模化应用阶段。在这一趋势下,作为核心基础部

翼菲科技斩获2026机器人产业领军企业
4月11日,投资家网第三届机器人产业大会暨具身智能50人论坛在深圳隆重举办。凭借在工业机器人领域的技术创新、产品实力、全球化布局,以及人形机器人
Neway电机方案在机器人技术方面的优势
采购率超85%,交货周期缩短至2周,紧急订单可72小时交付,确保工业机器人厂商的生产连续性。二、高功率密度与小型化设计,节省布局空间背景:工业机器人关节驱动器、六轴机器人等场景对电源模
发表于 03-30 09:39
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 多屏显示:显示配送状态、路径信息及简单的触摸操作界面,方便工作人员监控与交互。
开启您的下一代机器人项目综上所述,瑞芯微RK3576凭借其卓越的多屏支持、强大的多摄像头接入能力和高效的低功耗表现
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
简单点的项目来练练手,想来想去觉得自己下半年计划要做的巡线解迷宫机器人最为合适,不过由于时间有限的缘故,我决定先把这个机器人的原理验证机先搭建出来(标题中上篇的由来),等硬件和软件都经过验证没有问题后
发表于 10-20 10:39
先楫半导体获浦东产业基金战略投资,深入布局机器人赛道创“芯”领域
集团旗下张江科投和张科垚坤基金联合领投。先楫半导体预计将本轮融资资金积极投入机器人产业链布局,通过研发适配机器人应用的专用芯片及解决方案,深度融入这一蓬勃发展的产业

智能制造工业机器人技术发展趋势
(一)大范围动态场景理解 工业机器人在自主制造场景中,对环境和运行状态感知要求高,作业环境多变、状态难测。需构建动态语义地图,解决机器人精细化路径规划、协同作业控制难题,实时感知
工业机器人的特点
生产可以提高产品品质。通过设定相同的程序,机器人可实现重复操作,保证了产品的标准化;在精细化生产方面,工业机器人可实现低于0.1毫米的运动精度,可以完成精细的雕刻工作。提高产出
由于机器人
发表于 07-26 11:22

Robotous加速人形机器人研发与全球合作布局
6月19日,力矩传感器(Force Torque Sensor)专业研发企业ROBOTOUS发布:公司正加快推进尖端技术研发与全球合作,力图抢占人形机器人市场先机。
明远智睿SSD2351开发板:语音机器人领域的变革力量
,提高语音识别的准确率;同时也可连接高质量的扬声器,确保语音合成后的声音清晰、自然。TF卡接口能够存储大量的语音数据、对话模型以及语音机器人的知识库,使其具备更丰富的语言表达和知识储备。以太网和WIFI
发表于 05-28 11:36
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
校正,消除定位误差的积累,确保机器人始终能够准确知道自己在机场中的位置。
导航系统
路径规划 :当旅客向机器人提出目的地请求后,导航系统会根据机器人当前的位置和目标地点,在机场地图上
发表于 05-10 18:26



评论