 一种通过使用集成非线性光子电路来实现并行FMCW激光雷达引擎的新方法
一种通过使用集成非线性光子电路来实现并行FMCW激光雷达引擎的新方法

激光雷达(LiDAR)是通过发射激光,计算发射和接收光信号之间的时间延迟乘以光速来实现距离测量。现代3D激光雷达(LiDAR)传感器拥有较高的水平分辨率、垂直分辨率和径向分辨率,是4级(level 4)和5级(level 5)自动驾驶汽车持续发展的关键组件。
据麦姆斯咨询报道,3D激光雷达传感技术在自动驾驶领域的应用起源于2007年美国国防部高级研究项目署(DARPA)自动驾驶挑战赛,当时首次采用Velodyne的128线机械旋转式激光雷达。大多数现代激光雷达传感器都采用脉冲式飞行时间法(ToF)的原理。脉冲式ToF激光雷达的原理是通过传感器孔径发射出短脉冲或脉冲模式的激光,并使用平方律光电探测器探测返回的光功率,从而计算出距离。
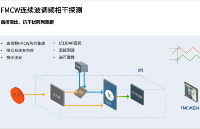
相干激光测距的原理则与脉冲式激光测距不同,最典型的是调频连续波(FMCW)激光雷达。FMCW激光雷达对发射激光进行线性光学频率啁啾调制,并与发射激光的“复制品”混合形成外差,从而将目标距离转换为无线射频。
相干探测具有许多固有的优势,例如增强的距离分辨率,利用多普勒效应直接进行速度检测,避免了太阳光眩光和干扰。但是,迄今为止,精确控制线性调频窄线宽激光的技术非常复杂,这成为FMCW激光雷达实现并行测量的主要障碍。
如今,洛桑联邦理工学院(EPFL)的Tobias Kippenberg实验室的研究人员找到了一种通过使用集成非线性光子电路来实现并行FMCW激光雷达引擎的新方法。他们将单个FMCW激光器耦合到氮化硅平面微型谐振器中,由于色散、非线性、腔体泵浦和损耗的双重平衡,连续波激光被转换为稳定的光脉冲序列。
该研究已发表在《自然》(Nature)杂志上。
“令人惊讶的是,形成的耗散克尔光孤子不仅在泵浦激光被啁啾调制时持续存在,而且还将啁啾激光不失真地传递给所有产生的梳齿,”Kippenberg实验室的博士后、该研究的第一作者Johann Riemensberger说。
该款微谐振器的小尺寸意味着其梳齿间距为100 GHz,这足以用标准的衍射光学元件分离它们。由于每个梳齿都获得了泵浦激光的线性啁啾,因此可以在微谐振腔中创建多达30个独立的FMCW激光雷达通道。
每个通道可同时测量目标的距离和速度,而不同通道的光谱分离使器件不受通道串扰,并可与最新基于光子集成光栅发射器的光学相控阵完美集成。
该器件的发射光束可以进行空间分离,且工作波段为1550 nm,能满足人眼安全要求,并不受摄像头的安全性限制。Kippenberg实验室的博士生Anton Lukashchuk说:“在不久的将来,EPFL开发的技术可将FMCW激光雷达的采样率提高10倍。”
这一概念依赖于平面非线性波导平台中历史最低损耗的高质量氮化硅微谐振器,由EPFL的微纳米技术中心(CMi)生产。这种氮化硅微谐振器已经由EPFL拆分出来的LiGENTEC SA公司投入市场,该公司专注于基于氮化硅的光子集成电路(PIC)制造。
该研究为相干激光雷达在未来自动驾驶车辆中的广泛应用铺平了道路。目前,研究人员正致力于将异构集成激光器、低损耗非线性微谐振器和光电探测器集成到单个紧凑的光学封装体中。
-
传感器
+关注
关注
2578文章
55875浏览量
795700 -
激光雷达
+关注
关注
983文章
4609浏览量
197447 -
自动驾驶
+关注
关注
795文章
15065浏览量
182045
原文标题:瑞士科学家开发出FMCW激光雷达并行测量新技术
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【科研动态】60万器件实现单片集成,激光雷达迎来FMCW方案的“硅光时刻”

固态激光雷达参数以及避障视频
4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

频率可调谐光子集成外腔激光器
调频连续波(FMCW)为什么是自动驾驶激光雷达的未来?

FMCW和ToF激光雷达,哪种更适合自动驾驶?
【科研动态】新一代集成光子FMCW激光雷达光源的设计框架与性能权衡

从原理到量产:FMCW激光雷达的核心技术体系与突破方向

硅光加持下的感知革命:FMCW 激光雷达技术全景解读
全球体积最小4D FMCW激光雷达亮相!

激光雷达为什么会出现串扰的问题?

洛微科技携4D FMCW激光雷达与3D感知方案闪耀光博会,引领行业新趋势




评论