 微雪电子ICM20948 10轴惯性导航模块(D)简介
微雪电子ICM20948 10轴惯性导航模块(D)简介

拥有更强的性能和更低的功耗 适合穿戴设备 内置温度传感器 可进行温度补偿
型号 10 DOF IMU Sensor (D)

10轴惯性导航模块
产品简介【一分钟自我介绍】
我是10轴传感器,监测运动姿态是我的强项,我也可以告诉你方位、高度和温度。
如果你希望拥有更高大上的人机互动,希望DIY飞行器或自平衡机器人,那就带上我吧。
【我的基本情况】
板载低功耗ICM20948(3轴加速度、3轴陀螺仪和3轴磁力计),内置数字运动处理引擎,可减少复杂的融合演算数据,减轻处理器的负荷
相比MPU9250,精度更高,拥有更低的功耗,更适用于可穿戴设备
板载BMP280(气压高度计),内置温度传感器,可进行温度补偿
相比BMP180,拥有更强的性能和更低的功耗
通过I2C通信就能获取10轴数据
【我的参数】
供电范围:3.3V~5V(内部低压差稳压)
加速度计特性:
分辨率:16位
量程(可选):±2、±4、±8、±16g
工作电流:68.9uA
陀螺仪特性:
分辨率:16位
量程(可选):±250、±500、 ±1000、±2000°/sec
工作电流:1.23mA
磁力计特性:
分辨率:16位
量程:±4900µT
工作电流:90uA
气压高度计特性:
气压分辨率:0.0016hPa
温度分辨率:0.01°C
量程:300~1100hPa(海拔高度:+9000m ~ -500m)
气压相对精度(700hPa~900hPa,25°C~40°C):±0.12hPa(±1m)
工作电流(1Hz更新速率,超低功耗模式):2.8uA
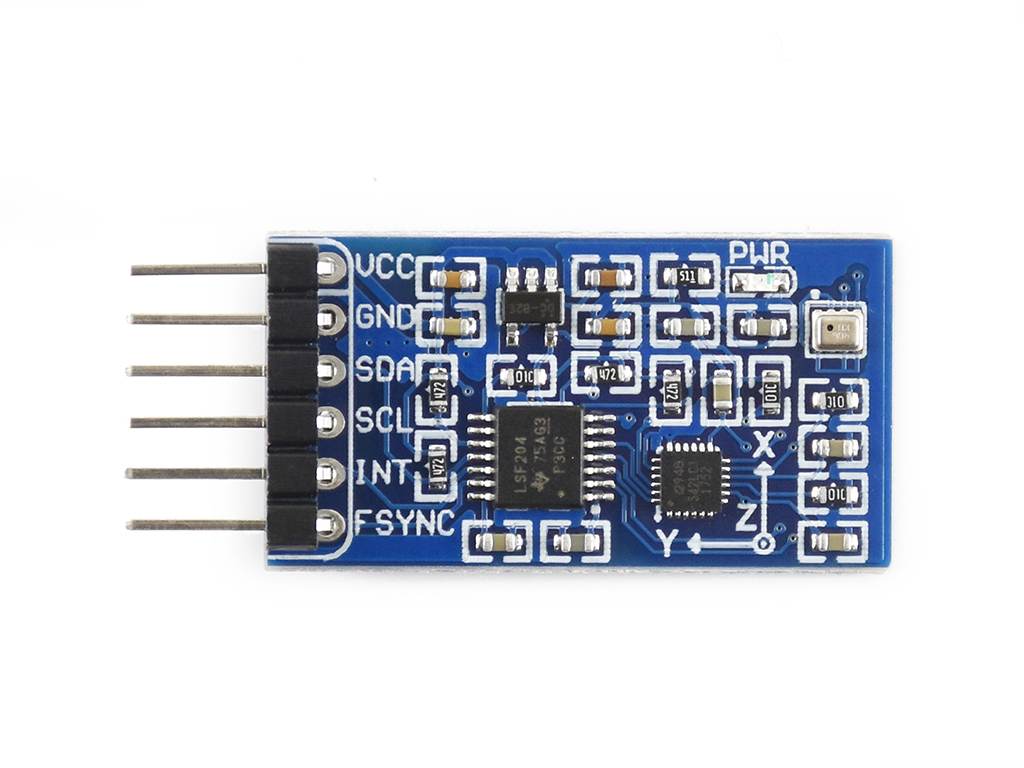
使用说明
| 引脚号 | 标识 | 描述 |
|---|---|---|
| 1 | VCC | 3.3V~5.5v电源 |
| 2 | GND | 电源地 |
| 3 | SDA | I2C数据线 |
| 4 | SCL | I2C时钟线 |
| 5 | INT | ICM20948数字中断输出 |
| 6 | FSYNC | ICM20948帧同步信号 |
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6107浏览量
37234 -
微雪电子
+关注
关注
9文章
873浏览量
8559
发布评论请先 登录
相关推荐
热点推荐
ADIS16448:紧凑精密10自由度惯性传感器的技术剖析与应用指南
ADIS16448:紧凑精密10自由度惯性传感器的技术剖析与应用指南 在电子工程领域,惯性传感器是众多应用中不可或缺的关键组件。今天我们要深入探讨的是一款紧凑且精密的
ICM-45686:高性能6轴MEMS运动跟踪设备的深度解析
ICM-45686:高性能6轴MEMS运动跟踪设备的深度解析 在当今科技飞速发展的时代,MEMS(微机电系统)传感器在众多领域发挥着至关重要的作用。ICM-45686作为一款高性能的6轴
TDK InvenSense ICM - 42370 - P:高性能三轴加速度计的深度剖析
TDK InvenSense ICM - 42370 - P:高性能三轴加速度计的深度剖析 在当今的电子设备设计领域,高性能、低功耗的传感器需求日益增长。TDK InvenSense的ICM
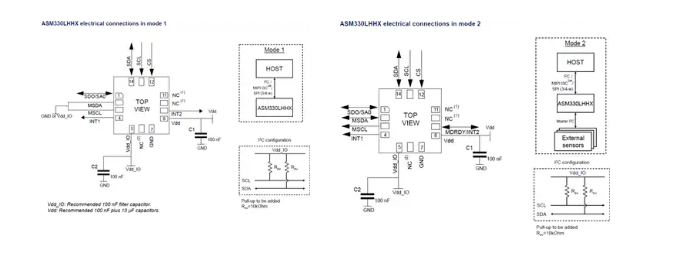
ASM330LHHX:汽车级六轴惯性模块与嵌入式机器学习核心的技术解析
STMicroelectronics ASM330LHHX汽车级6轴惯性模块是一款系统级封装 (SiP),具有一个3轴数字加速度计和一个3轴
光纤陀螺仪与惯性导航系统在无人车驾驶中的应用
一、光纤陀螺仪与惯性导航系统简介 光纤陀螺仪是一种基于光学传感技术的精密仪器,利用Sagnac效应来检测旋转角速度。与传统的机械陀螺仪相比,光纤陀螺仪具有全固态、无旋转部件和摩擦部件、寿命长、动态

TI德州仪器高可靠性DCDC护航导航模块
TI德州仪器LMR33630BDDA型3.8V-36V宽输入DCDC,效率逾90%,-40℃~125℃宽温,3A输出,1.4MHz高频小体积,为导航模块提供精准稳定供电,抑制波动,防定位漂移,延长续航,适配车载、无人机、工业等严苛场景。

中科亿海微三轴光纤陀螺板卡:国产FPGA助力IMU高精度三维姿态感知
系统、科研仪器等高精度姿态控制和导航领域广泛应用,成为未来惯性技术的发展趋势。中科亿海微电子科技(苏州)有限公司(以下简称“中科亿海微”)创新推出三

博世推出首款高性能六轴惯性传感器
博世即将推出全新一代MEMS惯性传感器——SMI980与SMU300,这是公司首次发布高性能六轴惯性传感器系列。该产品可广泛应用于辅助驾驶系统、高精定位、车载导航等场景,为车辆提供更加
组合导航系统中的惯性导航系统是什么?
在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。

组合导航系统中的惯性导航系统是什么?
在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。
零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程
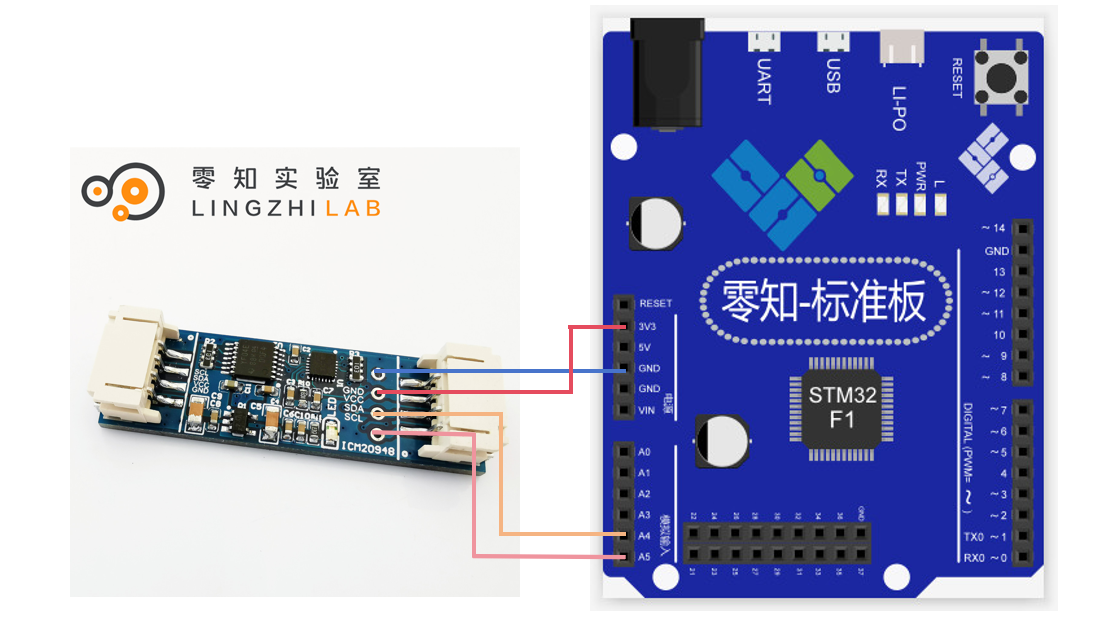
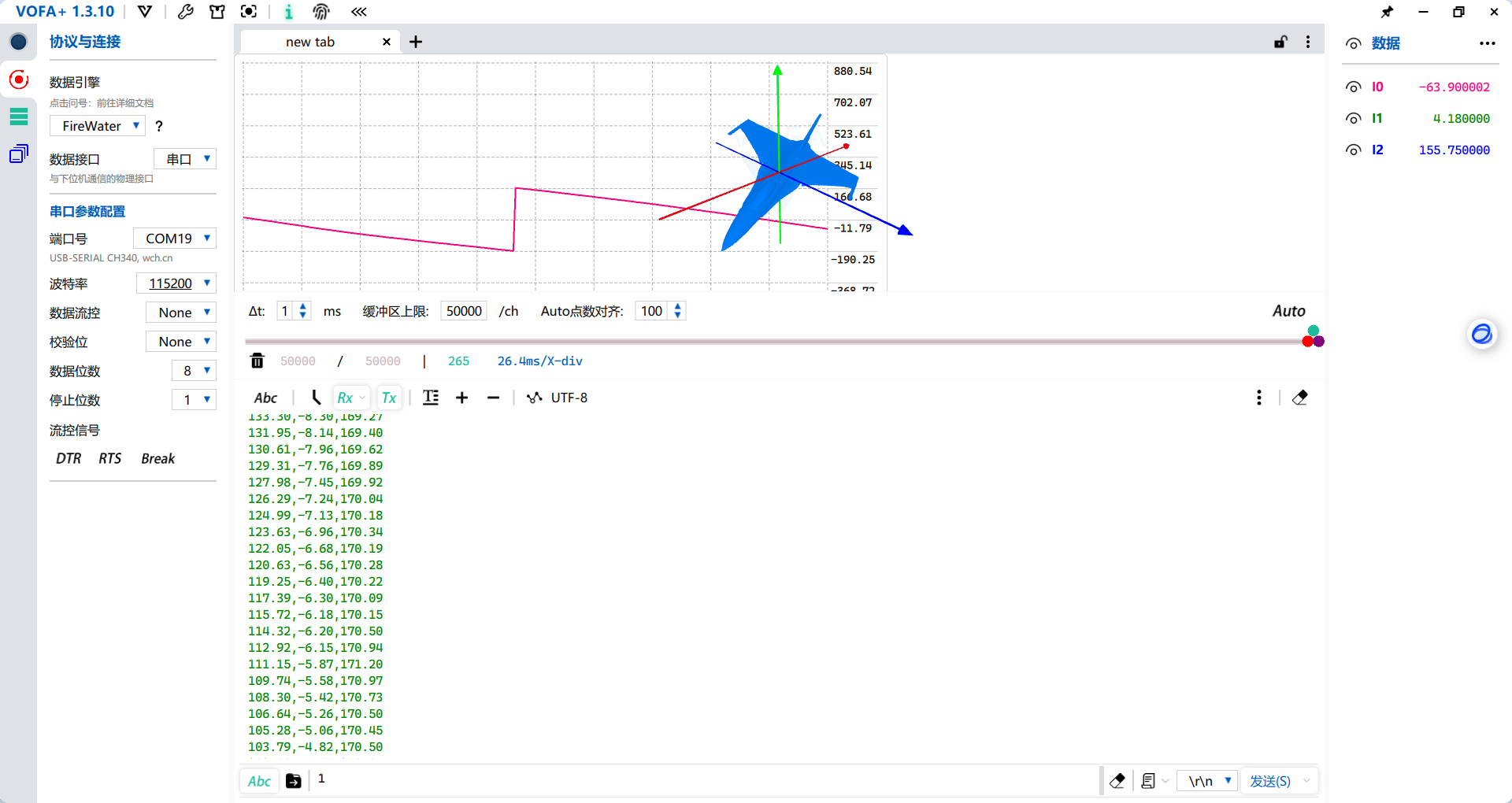
STM32F1本教程使用零知标准板(STM32F103RBT6)通过I2C驱动ICM20948九轴传感器,实现姿态解算,并通过串口将数据实时发送至VOFA+上位机进行3D可视化。代码基于开源库修改
发表于 06-09 14:53
零知开源——STM32F103RBT6驱动 ICM20948 九轴传感器及 vofa + 上位机可视化教程
本教程使用零知标准板(STM32F103RBT6)通过I2C驱动ICM20948九轴传感器,实现姿态解算,并通过串口将数据实时发送至VOFA+上位机进行3D可视化。零知开源在软件方面提供了完整的学习
零知经验——STM32F4驱动ICM20948 九轴运动传感器 + VOFA上位机可视化验证与抗漂移优化
核心优化成果:经过系统性调优,将ICM20948的yaw漂移从初始的15°/min降至0.8°/min,动态响应时间缩短40%,摇摆幅度减少75%
一、问题根源:九轴传感器漂移难题在嵌入式姿态感知
发表于 06-06 10:03
零知经验——STM32F4驱动ICM20948 九轴运动传感器 + VOFA上位机可视化验证与抗漂移优化
通过对ICM20948九轴传感器的系统性优化,成功将yaw轴漂移从15°/min降至0.8°/min,动态性能提升显著。硬件层面优化了I2C接线方案和电源去耦设计;软件方面实施了传感器配置优化、带
霍尼韦尔推出新一代惯性导航系统 HGuide-N380
在3D地图测量、测绘及其它主要应用领域,虽设备内部空间有限,但对性能的要求却不能有一丝一毫让步,因此需要一种小巧且高性能的惯性导航系统。为达到这种要求,霍尼韦尔开发设计了HGuiden380惯




评论