 Domino建筑机器的分步制作
Domino建筑机器的分步制作

步骤1:机箱,支撑构件和导向方式
计算所需零件的所有尺寸,并如图所示绘制在日光板上。
第1部分:A长底盘的设计可支持所有其他零件,电机和机械装置。
第2部分:是机械的顶部支撑,最终粘在背面支撑上。
第3部分:背面支撑在单一方向上引导机械。
第4部分:第2部分是机械杆的导轨,因为该机械由两个组成,并且在给定的路径中往复运动。
第5部分:此支撑构件的一端连接到第2部分,另一端连接到第6部分。提示:安装第5部分时,请注意多米诺骨牌向外移动的距离。
第6部分:
步骤2:带电动机的主推动机构。
主要机构由适当尺寸的太阳板和一个槽组成,通过槽将电动机的旋转运动转换为平移运动。
A红色轴是3D打印的,并附有电动机轴。一根吸管的一端固定在红色轴上,另一端固定在机构的插槽中,如图所示。
步骤3:降低机器人速度
为了平稳地应用将多米诺骨牌从机器人中推出的主要机构,主要现象是通过增加电机轴的负载来降低机器人速度。橡皮筋附着在电机轴上,这最终会增加电机轴上的负载并降低速度。附件如上图所示。
步骤4:WITBLOX套件
WITBLOX套件包括电机每个电机的驱动器和一个电源驱动器和电池。每个组件的连接非常简单。电池连接到电源块,电源块连接到电机驱动器。每个电机驱动器均连接到相应的电机。您可以在WITBLOX或WITBLOX应用程序上购买这些东西。两个电机,一端带轮,另一侧带脚轮。从视频到视频,从第1部分到第6部分的所有其他部分均已安装机械装置,并对机器人进行了出色的测试。
责任编辑:wv
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动器
+关注
关注
54文章
9132浏览量
157011 -
电动机
+关注
关注
75文章
4213浏览量
101954
发布评论请先 登录
相关推荐
热点推荐
邀请函 | CET中电技术邀您参加中国建筑学会建筑电气分会2026年学术年会
5月19-20日,中国建筑学会建筑电气分会2026年学术年会将在江苏徐州召开,会议将邀请业内权威专家,针对建筑电气领域的最新研究成果、热点前沿技术进展、行业动态、产业升级等各个方面进行深入探讨和交流

建筑节能测试:用数据衡量“绿色建筑”的真实效能
建筑节能测试是通过科学的检测手段,评估建筑物在实际运行或设计状态下能源消耗水平、热工性能、设备效率及可再生能源利用能力的综合性技术活动。其核心目标是验证建筑是否达到节能设计标准,识别能耗漏洞,优化

预端接光缆:推动智能建筑光纤通信发展
在智能建筑时代,建筑物不再仅仅是提供居住和办公空间的场所,而是集成了多种智能化系统,如通信网络系统、建筑设备监控系统、安全防范系统等,实现建筑物的高效管理和智能化控制。光纤通信作为智能
搭载RK3588处理器,IM1-707核心板撑起建筑机器人“精准+高效”
随着国家政策的支持和市场需求的增长,以及建筑工人老龄化严重,智能建筑机器人因其高效性和实用性得以快速应用、为行业带来全新的生产力变革。在这一进程中,稳定、强大且灵活的核心硬件至关重要。杰

超低能耗智能建筑漏水检测方案
随着智能建筑运维市场持续扩容,漏水监测需求日益凸显。城市化加速与存量建筑老化叠加,使得“早发现、早预警”成为物业管理的刚性需求。
感算商/城联合知名方/案公司推出了一款基于 4G/LoRa
发表于 10-28 09:10
建筑能耗监测:助力绿色发展的智能解决方案
在现代社会,建筑能耗问题日益凸显。据统计,国家机关办公建筑和大型公共建筑的年耗电量约占全国城镇总耗电量的22%,每平方米能耗是普通居民住宅的10至20倍,甚至高于欧洲、日本等发达国家同类建筑
Simcenter FLOEFD HVAC模块:促进对建筑环境和居住舒适度的仿真
优势评估热舒适度HVAC系统的测试效率设计符合严苛环境法规SiemensDigitalIndustriesSoftware是建筑环境气流和温度仿真领域的领先企业。它打造

格物优信手持红外热像仪在建筑领域的应用
在建筑领域,红外热像仪堪称一款不可或缺的无损检测利器。它能将建筑物内部诸多隐匿于肉眼视线之外的问题,经由温度分布图像的呈现方式清晰地展现出来。其应用范围广泛,涵盖建筑节能、设备维护以及环境检测等多个
丰坦机器人亮相首届粤港澳建筑机器人大赛,摘得「效能之星」奖
7月31日,由广东省住房和城乡建设厅、香港特别行政区政府发展局联合指导,粤港澳智能建造产业发展联盟和香港建造业议会共同主办的第一届粤港澳建筑机器人大赛颁奖仪式在香港举行,凭借高效的作业能力和优异

耐达讯RS232转Ethercat网关:建筑驱动连接的“秘密武器”
在建筑行业中,工程师们常常会面临各种设备连接的挑战。特别是驱动器的连接,其稳定性和高效性直接影响着建筑设备的运行。而耐达讯通信技术Rs232转Ethercat网关,就是解决这些问题的“秘密武器
发表于 07-21 15:29
LoRaWAN协议,叩响现代建筑的“生命之门”
万物互联时代,物联网技术正赋予建筑"智能生命"。LoRaWAN技术凭借低功耗、远距离传输等优势,成为智能建筑的首选通信方案。

【新闻中心】智唤建筑 电联未来|2025年江苏省建筑电气学术年会
2025年6月20日至21日,2025年江苏省建筑电气学术交流年会如期在南通中心诺富特酒店举行,吸引了众多行业精英齐聚一堂,共同探讨建筑电气领域的发展趋势和关键技术。此次年会以“智唤建筑电联未来

动态调适时代!既有建筑如何实现“监测-预警-优化”闭环?
摘 要: 在建筑能耗监测技术的基础上,融合建筑能源审计技术性和工程建筑能耗等级评价技术,研究现有建筑的能耗,明确提出节能改造计划方案。在未来,该研究思路还可以运用于我国既有

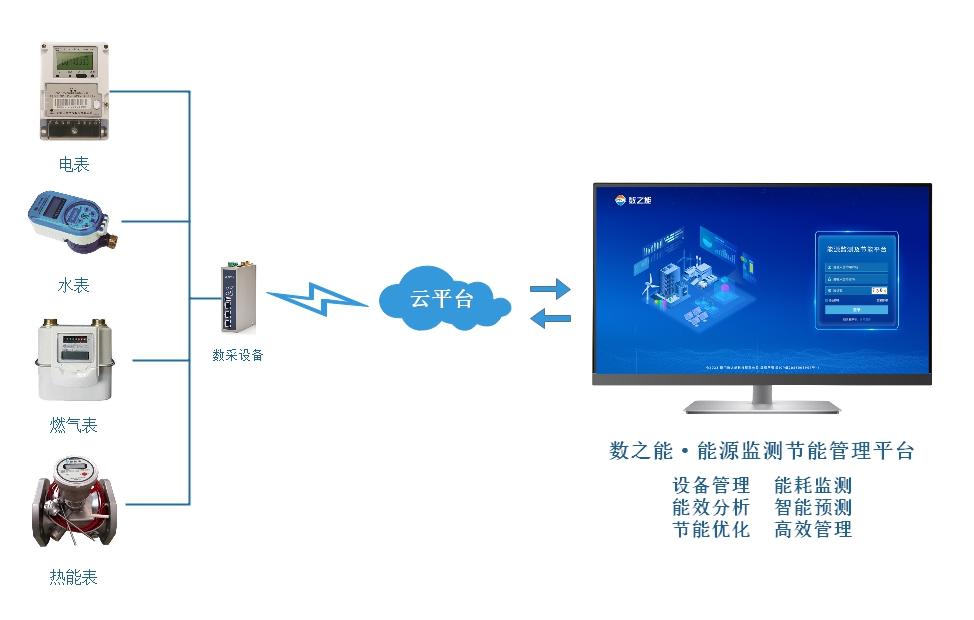
建筑能耗监测系统的组成与实现功能
在全球倡导节能减排与可持续发展的大背景下,建筑行业的能耗问题愈发受到关注。建筑能耗监测系统作为实现建筑节能的关键手段,能够实时掌握建筑内各类能源的消耗情况,为能源管理与优化提供数据支撑



评论