 如何用手臂控制一个DOF机器人手臂
如何用手臂控制一个DOF机器人手臂

步骤1:方框图/Scematic
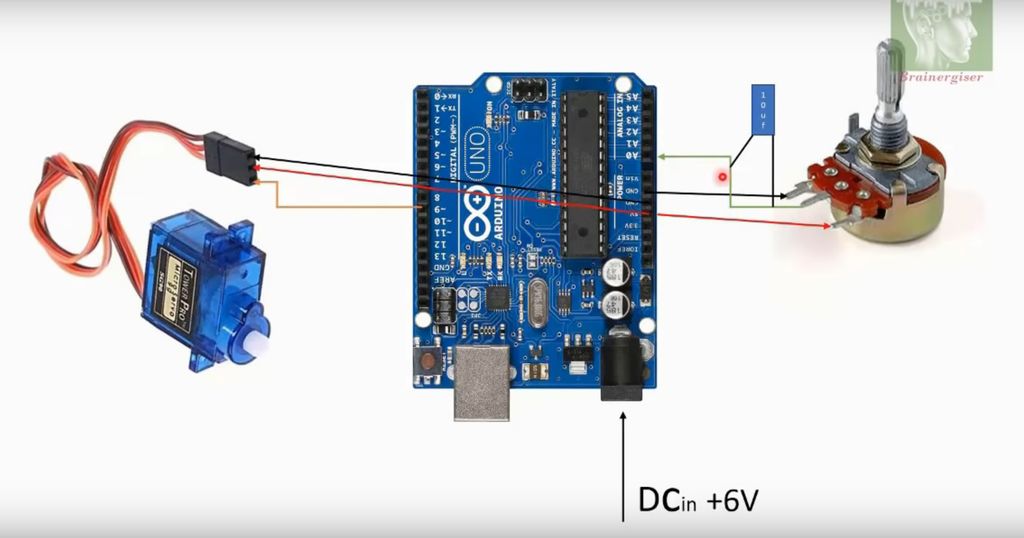
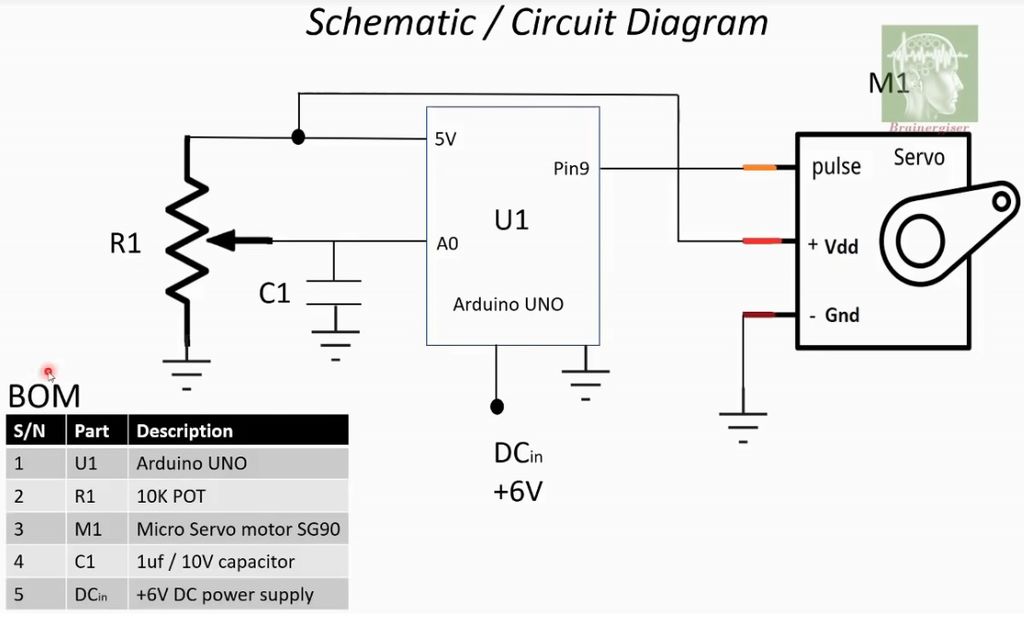
制作所需的电子元件:
1》 Arduino UNO板
2》 Micro SErvo电机
3》 10 K POT
4》 1uf,16V电容。
连接到端口-9和POT的伺服引脚连接到Arduino板的端口-A0。
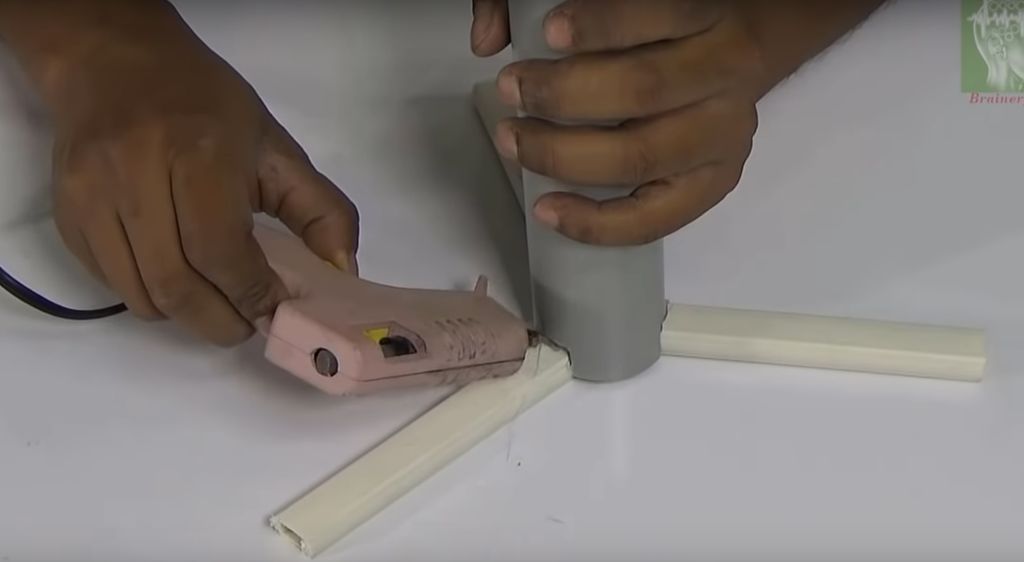
第2步:构建传感器
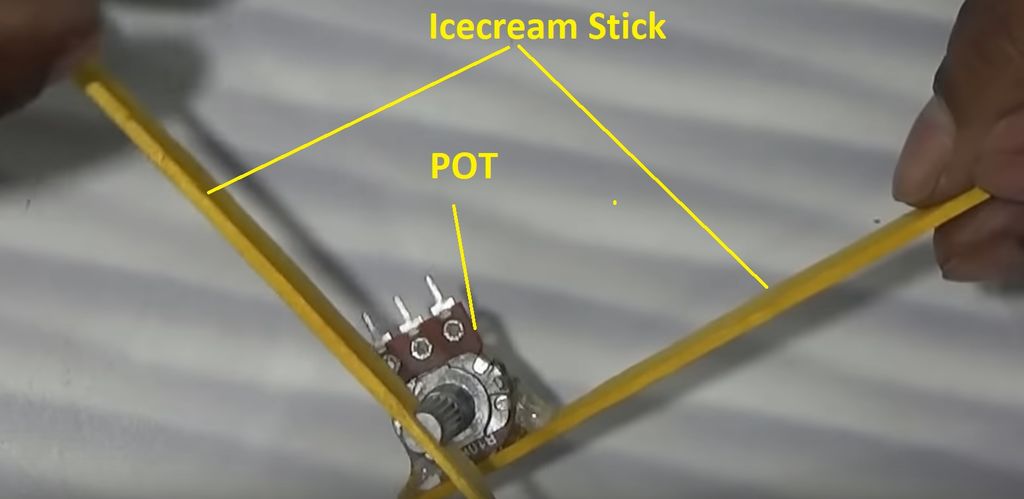
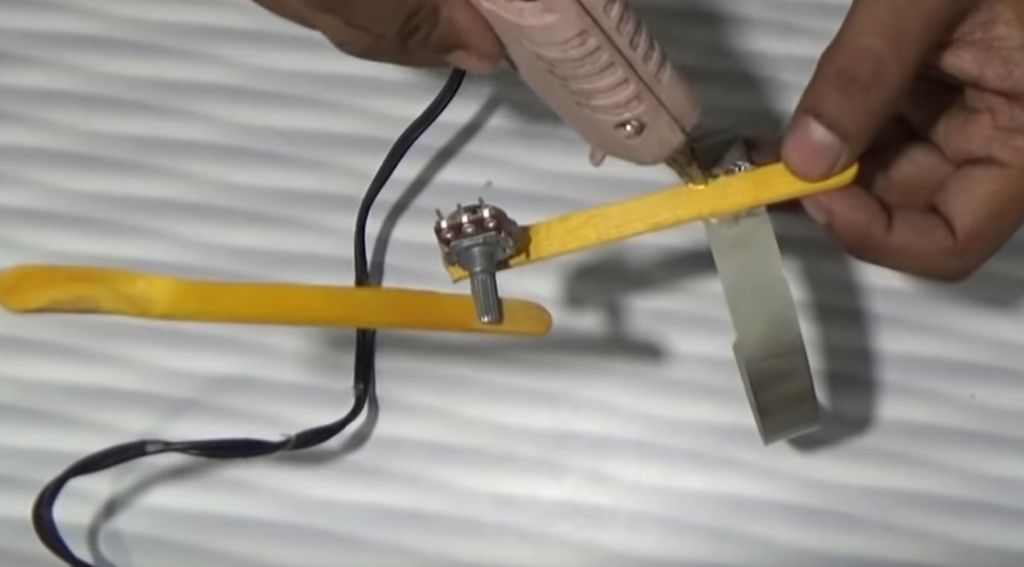

我们使用过两个冰淇淋棒和一个半PVC管,使传感器成为我们手臂的一部分。使用热胶将一根棒连接在罐和PVC管之间。其他棒只附有POT。
将半PVC管与夹子一样连在一起。 POT位于肘部,传感器杆的另一侧需要自由运动,因此使用橡皮筋与前臂连接。
第3步:构建手臂

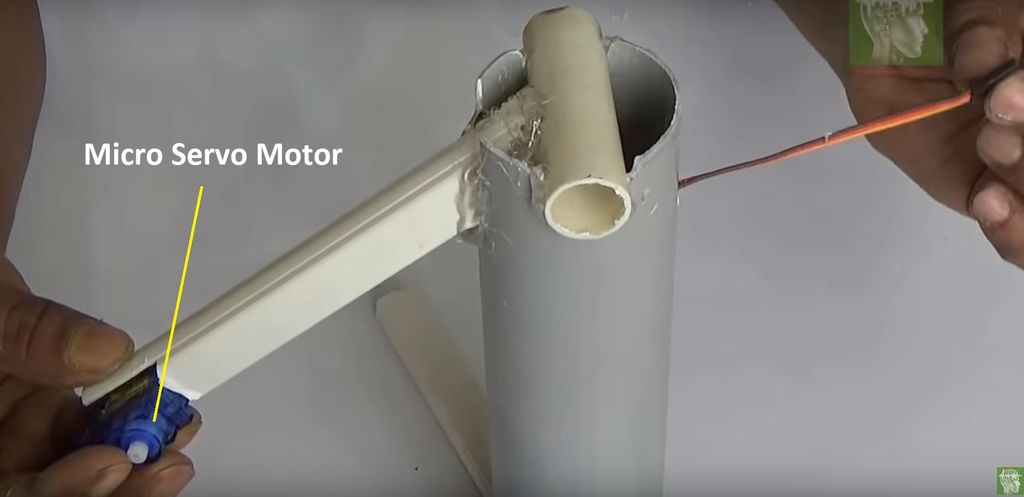

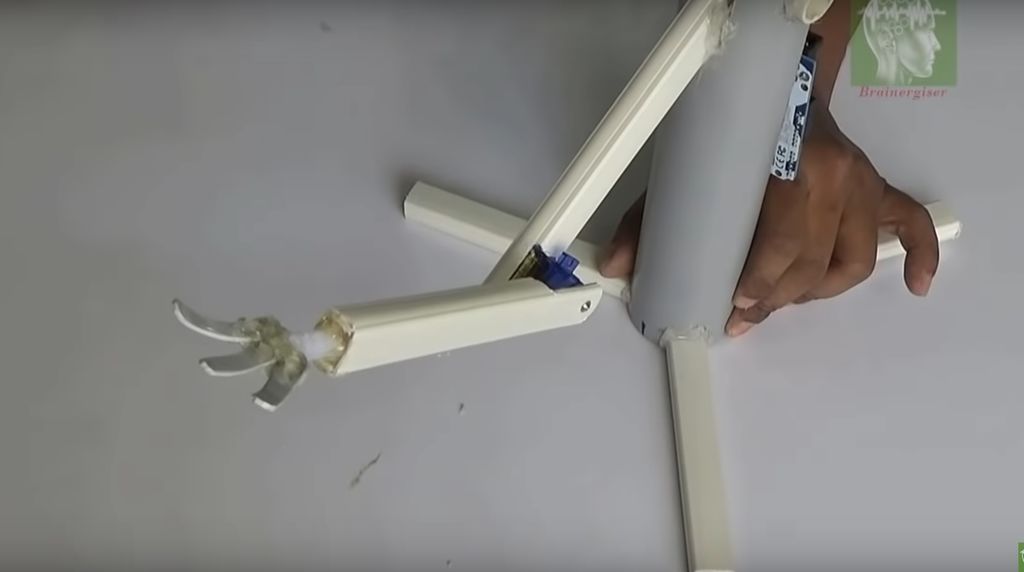

我们使用PVC管和电线套管制作一个自由度(DOF)机器人手臂。用于弯头联合我们使用一个伺服电机。伺服连接到Pin-9的Arduino板。
第4步:Arduino代码
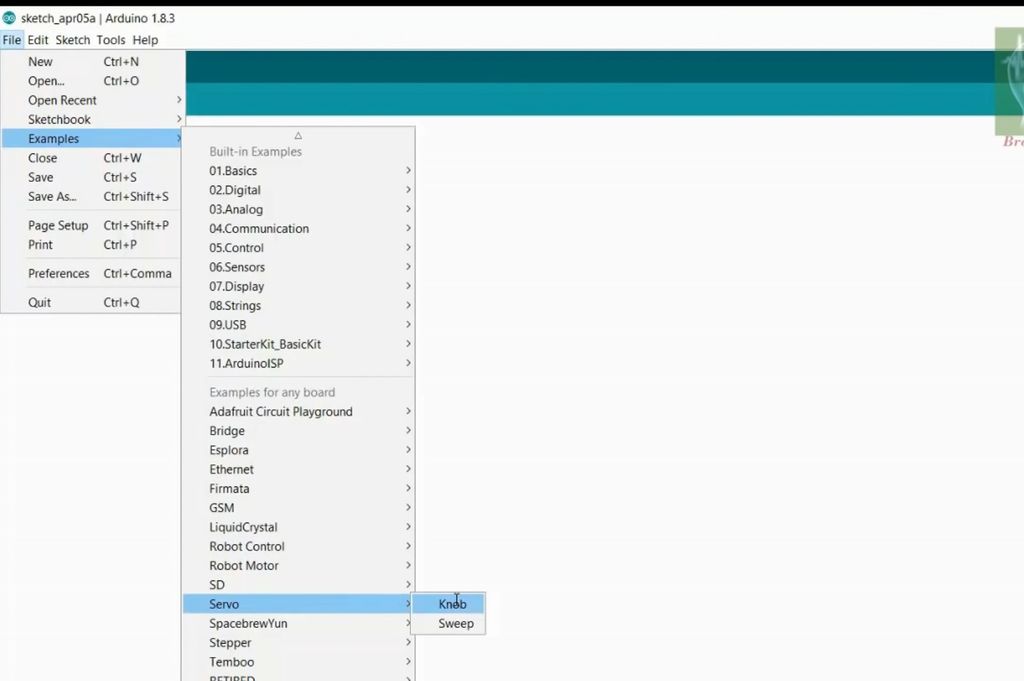
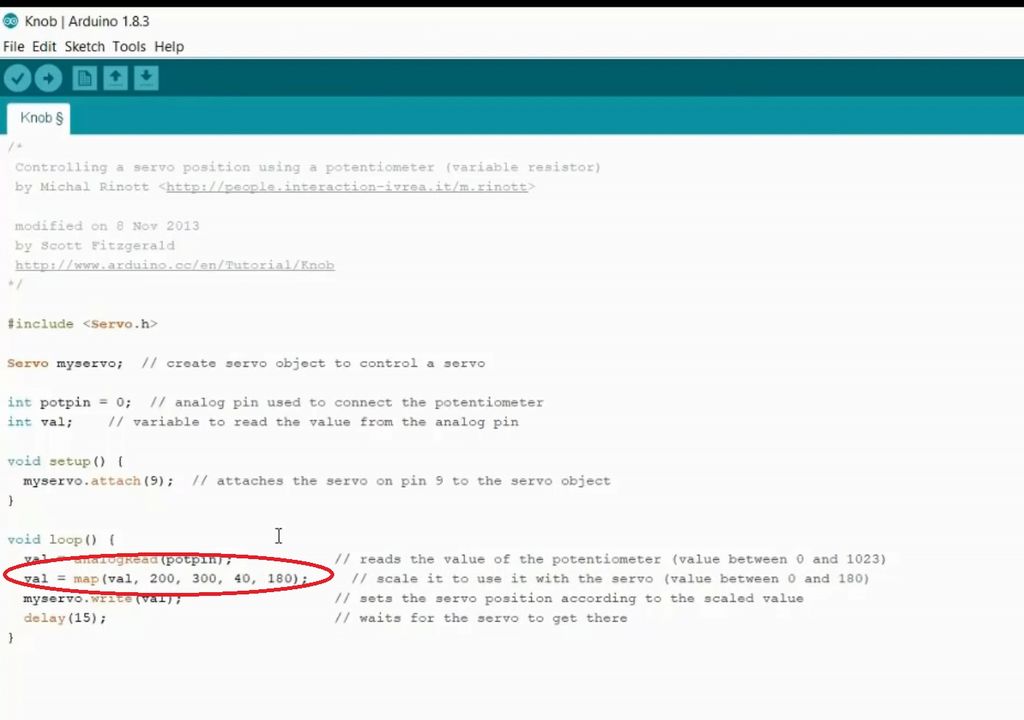
这很容易。它读取连接POT的Port-A0的模拟值,并根据该值从地图数组中生成一个值。它发送到pwm端口-9。基本上它是Arduino IDE中的示例文件。转到file-》 example- Servo-》 knob.You只调整map()函数的值。
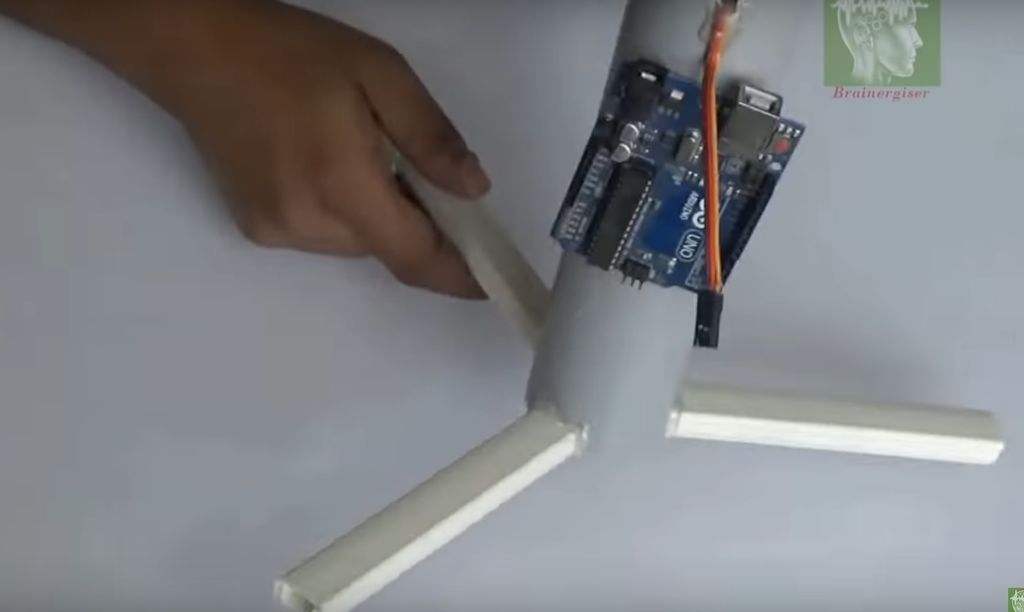
步骤5:最终装配和测试

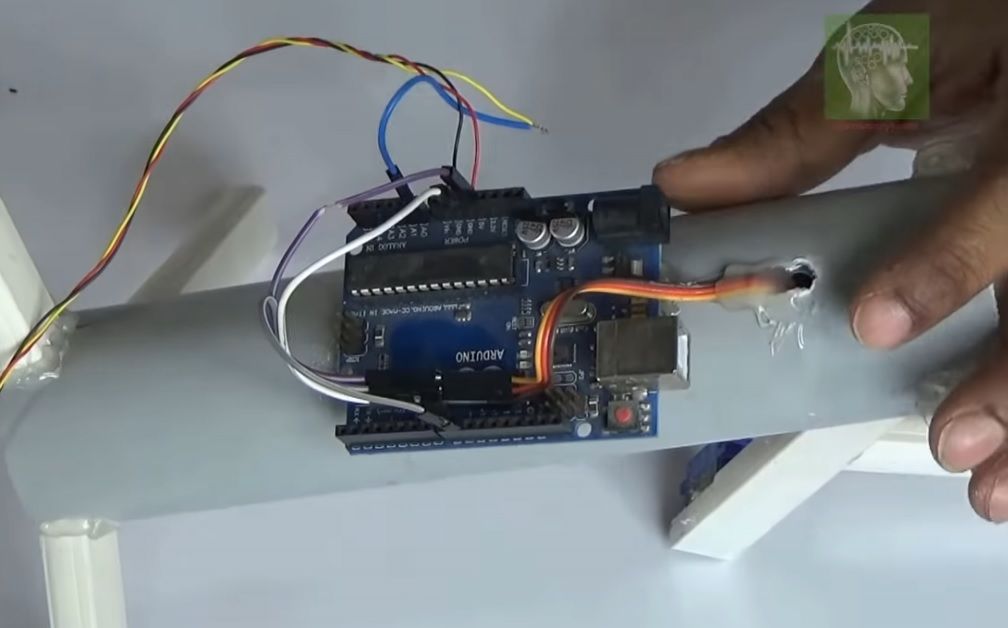
连接伺服和锅线Arduino按照原理图。加载草图。使用外部6V电源为Arduino UNO供电。精细调整地图功能。现在喜欢玩这个机器人。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
Arduino
+关注
关注
190文章
6527浏览量
197469 -
机器人手臂
+关注
关注
1文章
8浏览量
2705
发布评论请先 登录
相关推荐
热点推荐
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
假如你操作过机械臂,或者在工厂里调试过用于精密装配、抛光的机器人,一定碰到过这种怪事:明明让机械臂空载停在空中,周围啥也没碰,可力传感器上的读数却显示有好几牛顿的力,甚至还带着不小的扭矩。这种感觉
发表于 04-13 15:25
达明机器人携最新成果亮相NVIDIA GTC 2026
致力于定义机器人下一个十年的 AI Robotics 领导者达明机器人,于 NVIDIA GTC 2026大会中展出与云达科技(QCT)及NVIDIA 的最新策略合作成果 。达明机器人同步宣告
注意!注意!Profinet转devicenet与Fanuc机器手臂连接易忽略的小细节
及常见问题排查。 (一)Profinet转devicenet网关与Fanuc机器手臂接线易忽视细节(重中之重) Fanuc机器手臂为精密设备

疆鸿智能EtherNet/IP转DeviceNet“桥”接发那科手臂,智控无缝握手
疆鸿智能EtherNet/IP转DeviceNet“桥”接发那科手臂,智控无缝握手 新能源电池盒搬运上下料自动化产线中,罗克韦尔PLC通过EtherNet/IP协议作为控制核心,而发那科机械手臂则需

MOSFET,让机器人关节“活”起来的隐形冠军
EMC保护方案大全国外品牌替代表EMC行业标准雷卯实验室免费测试雷卯产品规格书讲解请点击以上内容了解更多每一次机器人手臂的精准抓取,每一处灵巧关节的流畅转动,背后都有一群“隐形冠军”在

智能制造领域的创新性突破:Profinet转ModbusTCP网关推动机器手臂精准协同控制
机器手臂。 配置流程:首先开启西门子博图配置软件,添加可编程逻辑控制器(PLC)的具体型号,导入Profinet转ModbusTCP网关的通用站描述(GSD)文件。 安装GSD之后,选取与之对应的模块

【案例分享】电子谷定制通讯线束:人形机器人稳定律动连接方案
零失真。今天为大家拆解其核心创新与场景适配优势,为何电子谷线束能成为机器人手臂连接的优选方案。01三大技术突破破解机器人运动传输核心痛点人形机器人手臂存在高频摆动

告别硬碰硬!HPM 芯片支持力位混合控制,让机器人关节学会“顺势而为”
想象这样一个场景:你的人形机器人正在弯腰拾起一个玻璃杯。如果关节太“硬”,手一碰到杯子就急停,可

哇塞!耐达讯自动化RS485转Profibus让机械手臂通信像坐了火箭!
在制造、汽车和电子等行业的生产线上,机械手臂的高效运行至关重要。然而,如何实现机械手臂与控制系统之间稳定、高速的数据通信,一直是困扰工程师们的难题。传统的RS485通信方式虽然应用广泛

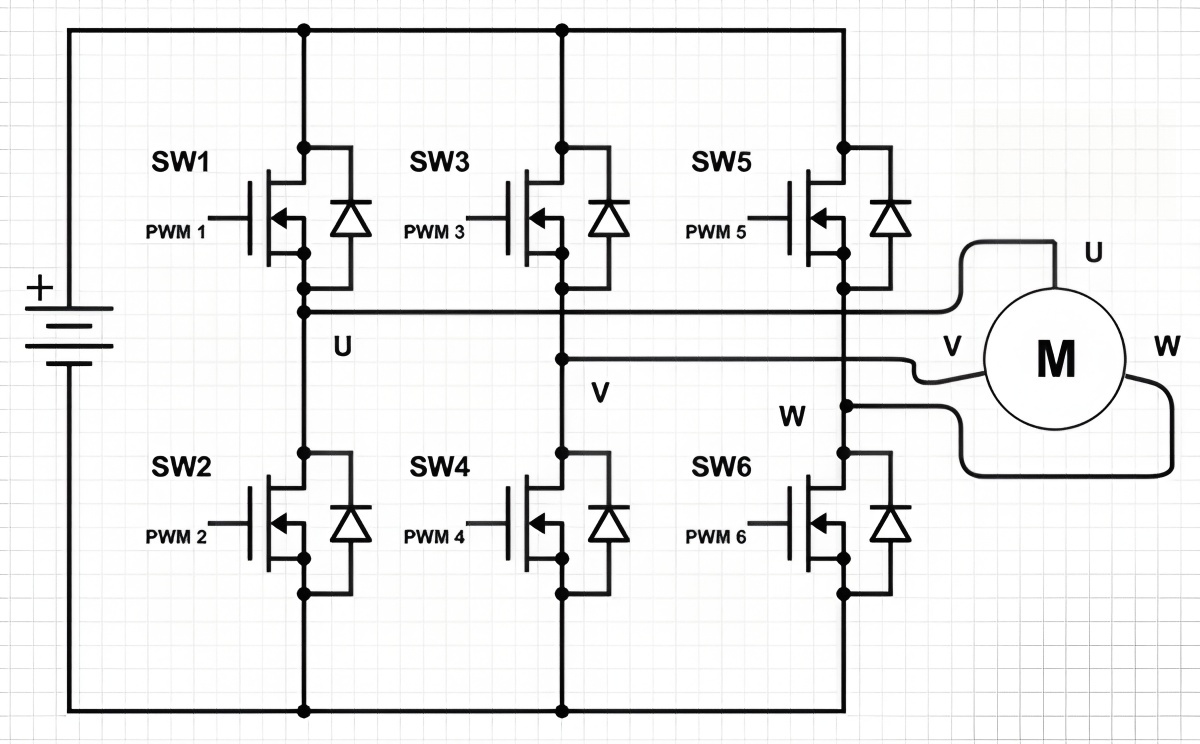
用于机器人手臂的基于B3M010C075Z和BTD5452R的三相全桥电机驱动器设计报告
倾佳电子用于机器人手臂的基于SiC碳化硅MOSFET器件B3M010C075Z和带有DESAT短路保护和米勒钳位的隔离驱动BTD5452R的三相全桥电机驱动器设计报告 摘要 倾佳电子(Changer
生产线不停摆的“隐形卫士”:优比施UPS电源,精准守护机器人手臂零停机
自动化生产线的“命门”——机器人手臂的“停机焦虑”在汽车制造车间的焊接工位,在电子装配厂的精密贴片环节,在物流分拣中心的高速分拨线上,机器人手臂的突然停机如同多米诺骨牌的第一张牌——轻则导致机械臂卡

汽车智造“破界”!PROFIBUS DP转ETHERNET/IP激活机器人手臂超能力
的智能化转型注入强劲动力。 西门子PLC以其稳定可靠的控制性能,长期作为汽车制造车间的核心控制中枢。通过PROFIBUS DP协议,PLC作为主站可精准调度从站设备,确保生产流程的有序执行。而机器人手臂作为汽车焊接、装配等关键工
速看!发那科机器人做为profinet转ethernetip主站参数设置,每步都关键
界面上进行调整。比如,调整主、从站,以及字节数和IP地址的对应。下面一起看一下机器手臂的参数如何调整。 发那科机器手臂作为主站时,不同的通信

机器人手臂"听不懂"指令?EtherCAT转PROFINET网关妙解产线通信僵局
协作机器人(如KUKA iiWA)使用EtherCAT控制,与Profinet主站(如西门子840D CNC)同步动作。
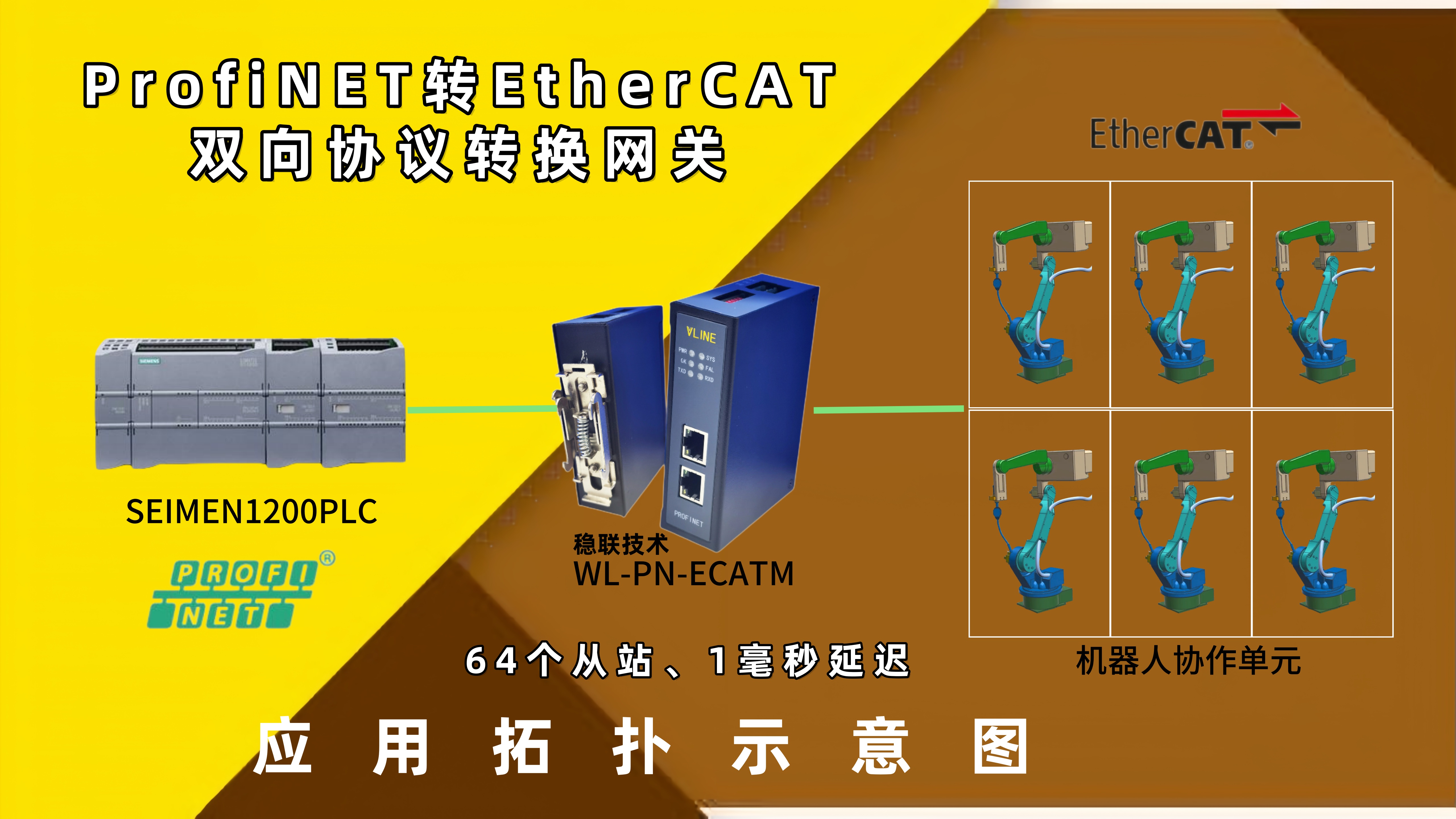
基于Profinet-EtherCAT网关-稳联技术WL-PN-ECATM



评论