 MOSFET,让机器人关节“活”起来的隐形冠军
MOSFET,让机器人关节“活”起来的隐形冠军

每一次机器人手臂的精准抓取,每一处灵巧关节的流畅转动,背后都有一群“隐形冠军”在高效协同。在关节驱动板微小的空间内,MOSFET正以每秒数万次的高速开关,将控制指令转化为精确的扭矩与速度。
作为三相逆变电路中的核心功率开关器件,MOSFET不仅是能量转换的“咽喉”,更是决定机器人关节效率、响应速度与长期可靠性的关键元件。它的选型,是一场融合电气性能、热力学、电磁兼容性(EMC)与机械布局的系统工程。
一.关节驱动的核心挑战:为何MOSFET是关键?
现代机器人关节普遍采用无刷直流电机(BLDC)或磁场定向控制(FOC)电机,其驱动架构为三相全桥逆变电路,由六个MOSFET组成上下桥臂,将直流母线电压转化为三相交流电驱动电机旋转。
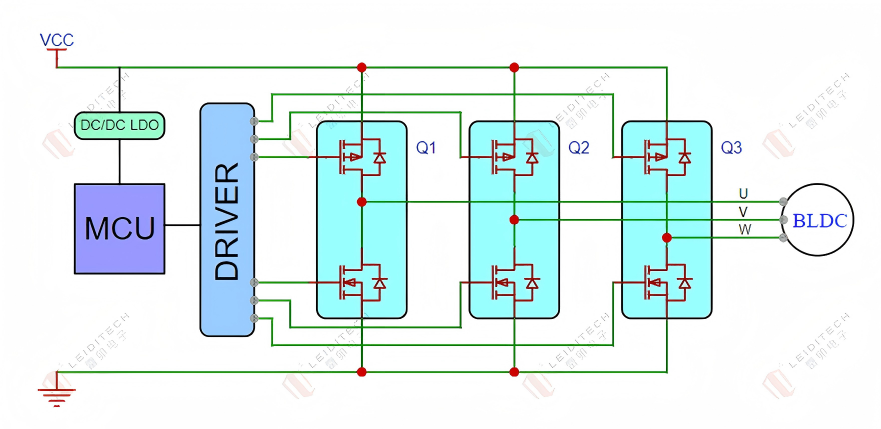
在此拓扑中,MOSFET承担着高频功率开关的角色,直接影响三大核心指标:
指标 | 影响机制 |
系统效率 | 导通电阻Rds(on)决定导通损耗;开关速度影响开关损耗。在高负载下,MOSFET损耗可占总功耗60%以上 |
动态响应 | 更快的开关速度→更高PWM频率→提升电流环带宽→实现更迅捷、精准的动作响应 |
可靠性与温升 | 关节空间狭小,散热困难。MOSFET的导通与开关损耗直接转化为热量,若热管理不当,易引发热失控或寿命衰减 |
MOSFET不仅是“开关”,更是系统性能的瓶颈所在。
二.选型实战:科学决策,避免
“纸上达标”
1.选型四步法
上海雷卯EMC小哥总结MOSFET选型应遵循以下步骤:
步骤 | 关键考量 | 推荐做法 |
①沟道选择 | N沟道 vs P沟道 | -低压侧开关:优先选用N-MOS(驱动简单、型号丰富) -高压侧开关:使用P-MOS或N-MOS+自举电路 |
②电压与电流 | Vds /Id设计余量 | -Vds应高于母线电压50%~100%(如24V系统选40V以上) -考虑急停反冲、母线波动、电容放电等瞬态尖峰 |
③导通损耗优化 | Rds(on)与温升平衡 | -使用公式P=I²×Rds(on)估算导通功耗 -优先选择低温升设计,尤其在密闭关节腔体内 |
④开关性能权衡 | 栅极电荷Qg vs | -Qg越小,开关损耗越低,支持更高频率。 -存在“Rds与Qg权衡”的问题:低Rds往往伴随高Qg,需根据频率需求取舍 |
特别提醒:数据手册首页参数不足以判断实际表现,务必查阅特性曲线图如Vds(on)@IdVds(on),Rds(on)(T)进行综合评估。
2.雷卯电子 N+P 合封 MOSFET 解决方案
雷卯电子推出N+P合封MOSFET,专为机器人关节驱动优化,在集成度、一致性与可靠性方面具备显著优势,列出部分型号。
型号 | NMOS参数 | PMOS参数 | 综合评价 | 推荐应用 |
LM3D40NP02 | 20V,40A, Rds(on)=5.3 mΩ | -20V,30A, Rds(on)=10.5 mΩ | 高性价比全能选手 -低导通损耗(尤其NMOS) -支持中高电流输出 -封装紧凑,PDFN3x3 | 中等功率关节(如前臂、手腕) |
| LM4606 | 20V, 7A, Rds(on)=13 mΩ | -20V, -6A, Rds(on)=30mΩ | 小型化低功耗代表作 -小电流下保持良好导通特性 - 封装SOP-8 | 微型伺服、传感关节、消费级机器人部件 |
| LMAK68NP04 | 40V, 68A, Rds(on)=4.5mΩ | -40V, -47A, Rds(on)=12mΩ | 高压大电流主力型: -功率密度高,适合大扭矩关节 - 封装TO-252-4 | 大功率关节(如腰部、大腿、髋部) 需承受冲击负载或再生制动场景 |
LM3D40NP02,LM4606,LMAK68NP04等等。
另也可用单颗NMOS +单颗PMOS组成上下桥臂。
三.超越数据手册:系统级设计才是
决胜关键
优秀的器件只是起点,真正的性能来自系统级工程实践。雷卯EMC小哥整理如下:
1.热管理:生命线级别的设计
利用PCB铜层、导热过孔(via)、导热界面材料(TIM)将热量传导至外壳。
必须进行热仿真,基于RθJC
(结到壳热阻)和实际散热条件计算结温。
关键部位建议集成温度传感器,实现过温降额保护。
2.驱动与布局优化
要素 | 最佳实践 |
驱动回路 | 驱动IC紧靠MOSFET栅极,缩短走线,降低寄生电感 |
去耦网络 | 在母线与VDD引脚旁配置分层电容:100μF+100nF+10nF,抑制高频噪声 |
对称布线 | 三相桥臂保持电气与热对称,避免局部热点 |
栅极电阻 | 适当串联10-22Ω电阻抑制振铃,兼顾开关速度与EMI |
3.保护电路不可或缺
过流保护(OCP):硬件比较器实现微秒级关断
欠压锁定(UVLO):防止低电压异常启动
温度监控(TMP):实时监测结温,预防热击穿
“没有保护的MOSFET就像没有保险的安全带。”——堵转、急停等极端工况必须被充分考虑。
四.未来展望:向更高密度、更智能迈进
随着仿生人形机器人迈向31自由度以上 的复杂结构 ,对MOSFET提出更高要求:
1、更高功率密度→需采用DFN、PowerFLAT等先进封装。
2、更高开关频率(>100kHz)→推动低Qg低Crss器件应用。
3、更强智能化→集成驱动+保护功能的 智能半桥模块 成趋势。
宽禁带半导体(SiC/GaN)已在高端场景试点,未来有望打破硅基极限。
雷卯电子将持续深耕功率半导体领域,从硅基优化走向新材料探索,助力机器人实现“更强、更灵、更稳”的运动生命力。
五.总结:专业选型建议清单
(工程师版)
设计维度 | 推荐策略 |
电压选型 | 24V系统选40V耐压,预留≥50%裕量 |
电流选型 | 连续工作电流≤标称值60%,留足瞬态余量 |
Rds(on) | 越低越好,重点关注高温下的表现 |
封装选择 | 优先DFN等微型高散热封装 |
驱动方式 | 高速应用必用专用驱动IC(>2A peak drive) |
系统防护 | TVS+过流比较器+温度监控三位一体 |
布局原则 | 对称、紧凑、低感、强散热 |
MOSFET虽小,却是机器人运动之魂。一次成功的选型,不只是参数的堆砌,而是对系统边界、工况演化与可靠性极限的深刻理解。
雷卯电子愿以高性能器件与深度技术支持,成为每一位机器人工程师背后的坚实伙伴,共同赋予机械以生命的律动。
-
MOSFET
+关注
关注
151文章
10808浏览量
234960 -
开关器件
+关注
关注
1文章
216浏览量
17760 -
机器人关节
+关注
关注
0文章
30浏览量
367
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人关节的 “隐形功臣”:这颗P沟道MOS管有点意思!

春晚机器人跳舞背后:精密关节连接器的“丝滑”秘密

SiLM2026EN-DG DFN3×3封装如何实现200V半桥驱动,为机器人关节电机注入高效动力?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起

半桥驱动SiLM2026EN-DG DFN3x3小封装,轻松搞定200V机器人关节电机
驱动机器人革命的"关节引擎",让未来触手可及!

采用DFN3×3封装SiLM2026EN-DG 200V半桥驱动器,如何实现机器人关节的高效紧凑驱动?
为机器人关节驱动头疼?SiLM2026EN-DG让200V高压与DFN3x3小封装兼得!

集成多摩川磁性编码器的伺服电机与机器人关节设计创新
集成MT6701磁编芯片的机器人关节模块化设计与驱动优化




评论