 注意!注意!Profinet转devicenet与Fanuc机器手臂连接易忽略的小细节
注意!注意!Profinet转devicenet与Fanuc机器手臂连接易忽略的小细节

专项重点:Profinet转devicenet网关与Fanuc机器手臂连接常见问题及易忽视细节。

结合现场经验,该连接80%的通讯故障源于接线不规范、机器人设置遗漏,以下阐述接线细节、设置要点及常见问题排查。
(一)Profinet转devicenet网关与Fanuc机器手臂接线易忽视细节(重中之重)
Fanuc机器手臂为精密设备,接线规范影响通讯稳定性,有8个核心要点:
- 端子对应错误(最常见):通讯端子接线须严格对应,严禁交叉、接反,勿将机器人SH当GND接线。
- 屏蔽层接地规范(易忽视):DeviceNet总线电缆屏蔽层须“单端接地”,仅在网关端接入接地端子排,机器人端悬空绝缘,勿两端接地。
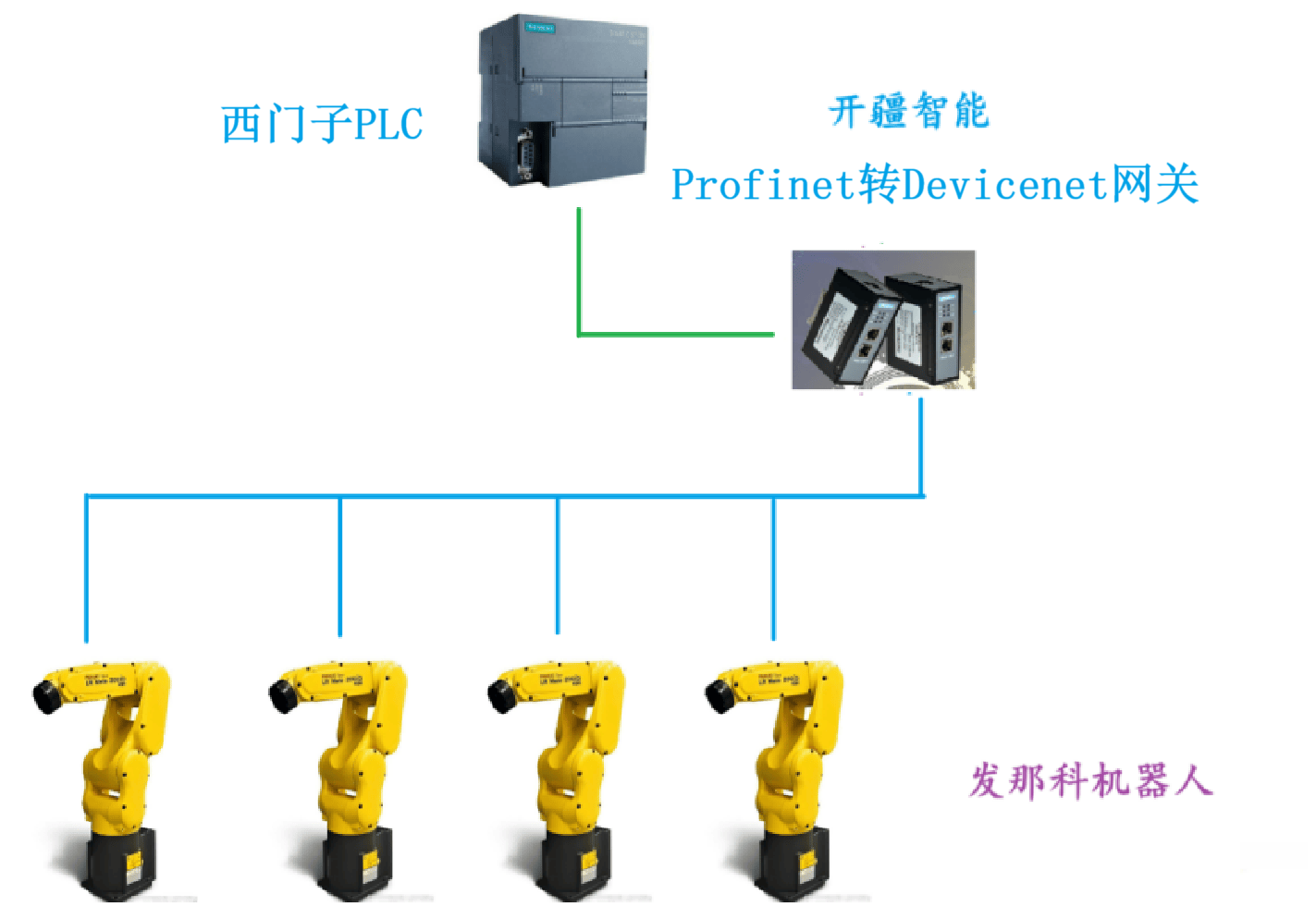
- 总线拓扑严格遵循线性(禁止分叉):DeviceNet总线为线性拓扑,网关为起点,Fanuc机器手臂接入中间或末端,勿用星形、树形接线及分线器、交换机连接。正确接法是网关OUT→变频器IN→传感器IN→机器人IN,机器人OUT接终端电阻。

- 终端电阻配置(致命细节):DeviceNet总线两端须接120Ω终端电阻,网关端口和机器人端都要配置。
- 电缆选型与长度控制:须选用DeviceNet专用屏蔽双绞电缆,控制总线长度,网关与机器人电缆不超50米,超50米需加中继器。
- 端子压接规范(易遗漏):接线选匹配端子,压接确保线芯插入无松动、虚接,勿多根线芯插同一端子。
- 电源共地处理:Profinet转devicenet网关、Fanuc机器手臂、PLC需共用24V电源地,确保无电位差。
(必须交叉则垂直交叉)。
(二)Fanuc机器手臂设置易忽视细节(直接影响通讯成败)
除接线外,机器人自身设置遗漏或错误也会致通讯失败,关注6个易忽视细节:
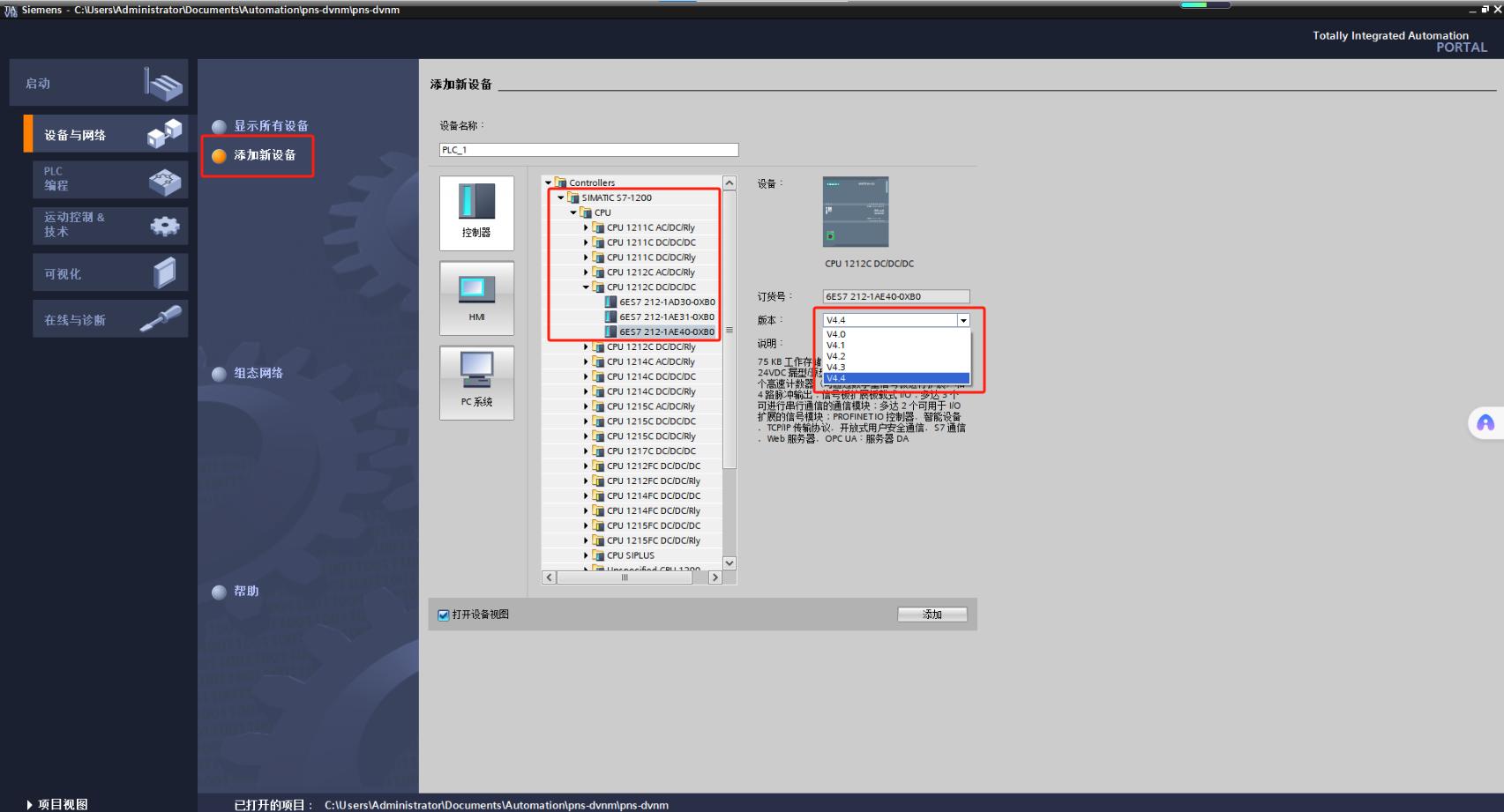
- 通讯模块未激活:部分Fanuc机器手臂默认未激活DeviceNet通讯模块,需安装选件、获取PACcode后激活。
- 节点地址重复或未设置:机器人节点地址与网关配置一致(本案例设为4),且与其他从属设备地址不重复(2 - 63唯一)。

- 波特率不匹配:机器人与Profinet转devicenet网关波特率严格一致(本案例125kbps),禁用自动协商。
- 信号映射不完整:仅设置动作指令映射,未映射状态、故障码信号,PLC无法读取运行状态、发现故障。
- 机器人通讯参数设置后,需点击「Save」保存并重启才生效。易忽视点:设置后未保存、重启,参数未生效致通讯失败,反复调试无果。

(三)常见问题及快速排查方法
- 网关扫不到 Fanuc 机器手臂:优先排查接线,确认通讯模块激活,核对节点地址,检查终端电阻,重启机器人与网关。
- 通讯连上但机器人无响应:排查控制模式,检查信号映射,核对波特率,检查指令地址对应情况。
- 通讯时断时续、机器人动作卡顿:排查屏蔽层接地,检查通讯电缆,核对总线长度,检查端子压接。
- 数据乱码、故障码误报:排查电源共地,检查波特率,检查信号映射,检查终端电阻。
Profinet转devicenet网关与FANUC机器人通讯故障,多由接线不规范与机器人参数设置遗漏导致。 现场需严格规范端子接线、屏蔽接地、总线拓扑与终端电阻配置,同时确保机器人通讯模块激活、节点地址与波特率匹配、信号映射完整并保存重启。按接线—参数—映射顺序排查,可快速解决通讯异常,保障系统稳定可靠。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
DeviceNet
+关注
关注
1文章
493浏览量
17815 -
Profinet
+关注
关注
9文章
2431浏览量
28527 -
Fanuc
+关注
关注
19文章
123浏览量
39266 -
机器手臂
+关注
关注
1文章
20浏览量
11826
发布评论请先 登录
相关推荐
热点推荐
Profinet从转DeviceNet主网关在1500PLC与那智机器人通信应用纪实
Profinet从转DeviceNet主网关在1500PLC与那智机器人通信应用纪实 本次项目采用Profinet从站→

DeviceNet网络接线注意事项
客户在使用DeviceNet网络设备时,有时会遇到通讯无法建立,通常都是由于物理连接错误而导致的,DeviceNet设备物理连接需要注意以下

Profinet转DeviceNet网关在实际应用过程中易忽略的物理接线问题。
下面为你提供一篇可直接放进技术文档、专业精准、重点突出的文章,主题:西门子S71200 连接 Profinet转DeviceNet网关,重点讲网关D

PROFINET 与 DeviceNet 异构网络互通初探
Profinet 转 DeviceNet 协议网关的 PROFINET 端口直连笔记本电脑; 为 Profinet

疆鸿智能EtherNet/IP转DeviceNet“桥”接发那科手臂,智控无缝握手
疆鸿智能EtherNet/IP转DeviceNet“桥”接发那科手臂,智控无缝握手 新能源电池盒搬运上下料自动化产线中,罗克韦尔PLC通过EtherNet/IP协议作为控制核心,而发那科机械手

Profinet转Ethernet IP网关连接库卡机器人问答式精简配置指南
IP从站)”架构,以问答形式精简配置步骤,穿插注意事项。 一、基础认知 问:核心连接逻辑及主从关系? 答:通过Profinet转Ethernet IP网关实现西门子PLC与库卡

疆鸿智能PROFINET转DEVICENET网关:发那科机器人无缝对接西门子
疆鸿智能PROFINET转DEVICENET网关:发那科机器人无缝对接西门子 在汽车制造车间里,新旧设备的通信协议不统一,一直是让人头疼的问题。去年我们做的一条发动机装配线改造项目,就

智能制造领域的创新性突破:Profinet转ModbusTCP网关推动机器手臂精准协同控制
本案例为西门子1200PLC经由Profinet转ModbusTCP网关与机器手臂进行连接的配置案例。所需设备包括西门子1200PLC、具备

伺服伴侣,Profinet转DeviceNet网关通讯保障后连接伺服驱动器与西门子S7-1200PLC
伺服伴侣,Profinet转 DeviceNet网关 通讯保障后****连接伺服驱动器与西门子S7-1200PLC 在工业自动化和控制系统中,Dev
Profinet从转DeviceNet从协议网关
一,主要功能 1、 疆鸿智能JH-SPN-SDVN 型是Profinet从转DeviceNet从工业级Profinet网关。这种网关设备允许将Pr

开疆智能Profinet转Devicenet网关连接ABB机器人配置案例
本案例是西门子PLC通过开疆智能研发的Profinet转Devicenet网关连接ABB机器人,网关作为
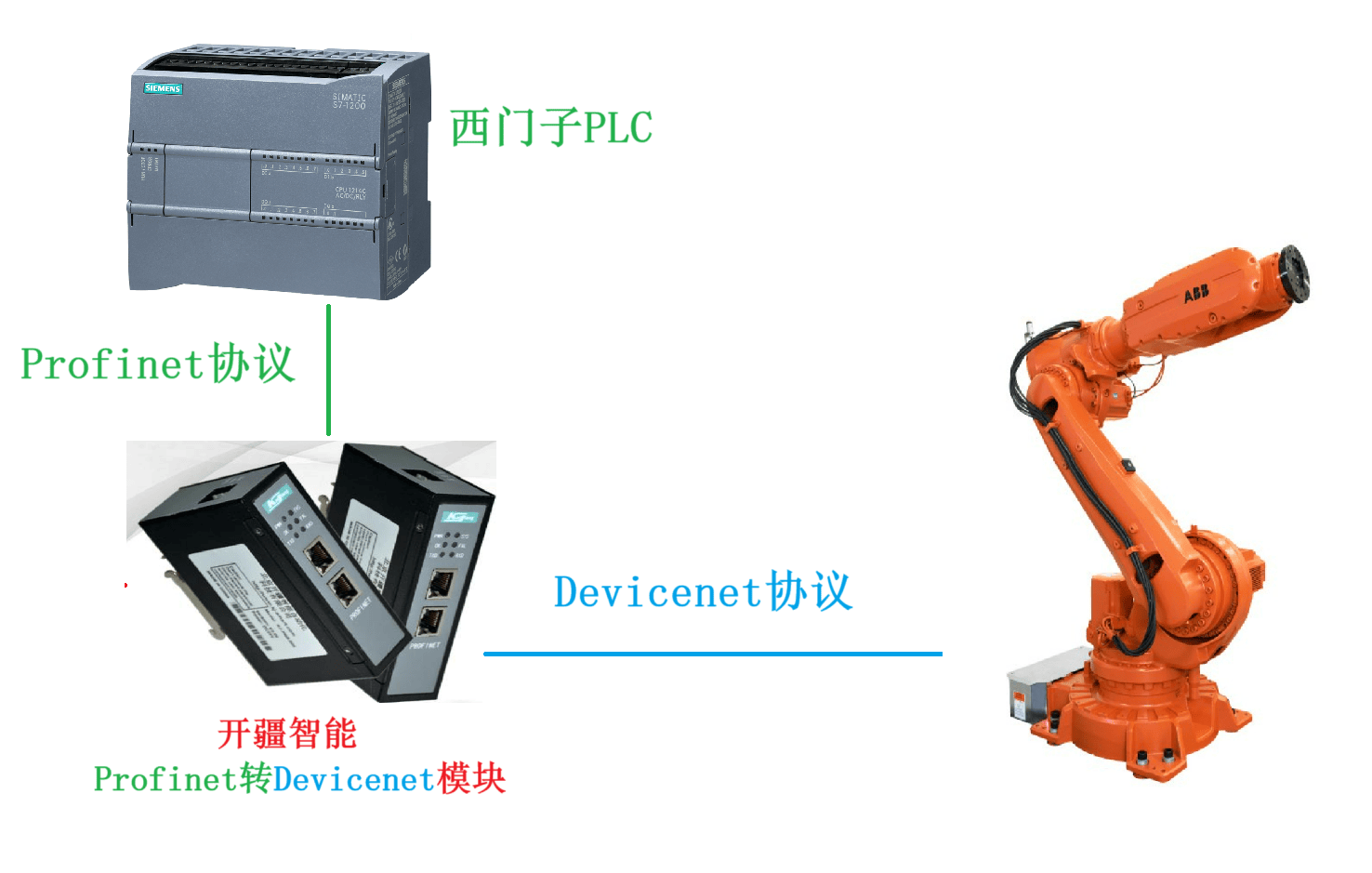
开疆智能Profinet转Devicenet网关连接发那科机器人配置案例
本案例是西门子PLC通过Profinet转Devicenet网关连接发那科机器人的配置案例 具体操作步骤如下。 配置过程: 网关配置 打开网
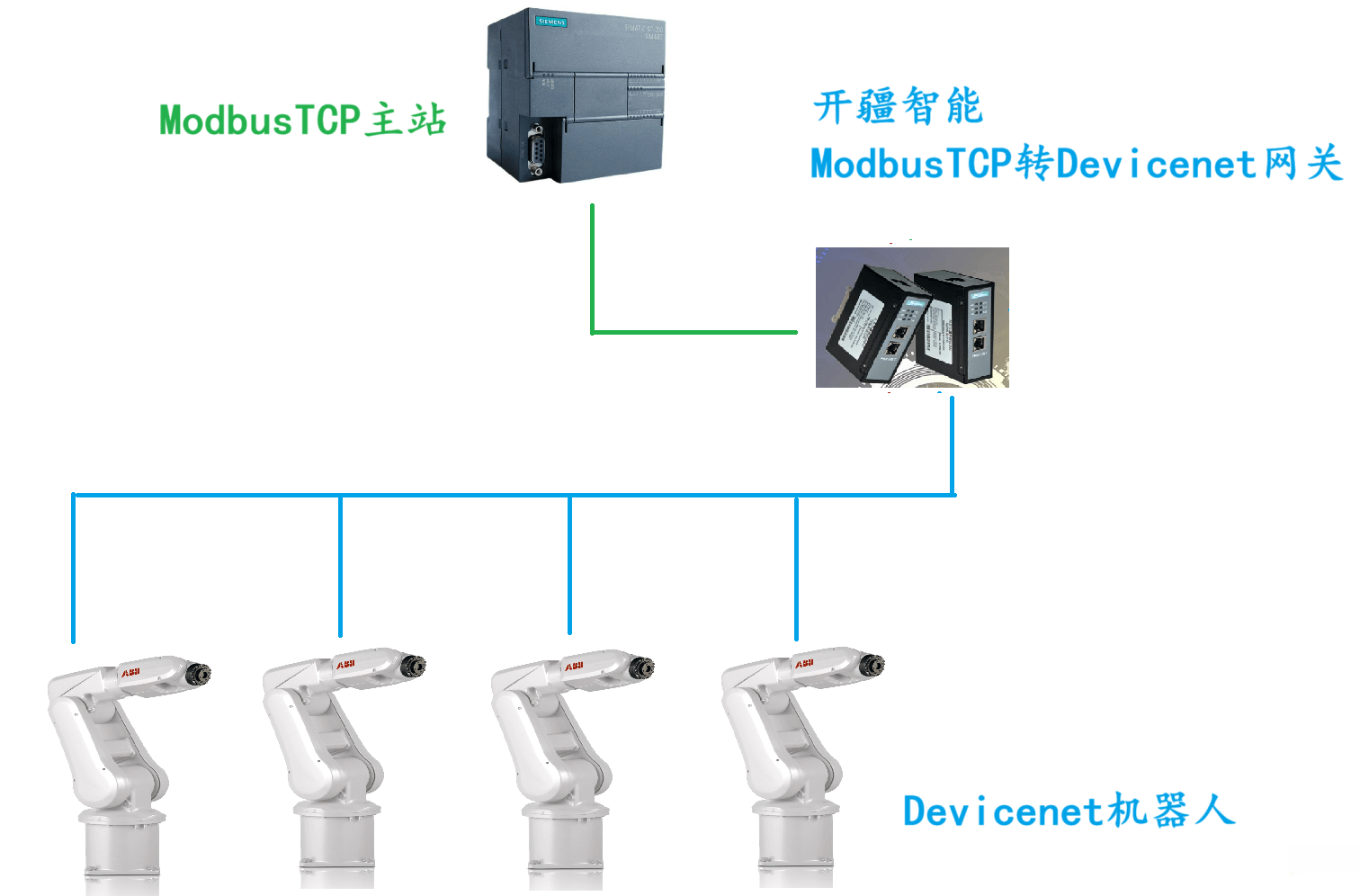
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例
本案例是ModbusTCP主站通过开疆智能ModbusTCP转Devicenet网关连接发那科机器人的配置案例,操作分为三个配置1:ModbusTCP主站配置2:ModbusTCP




评论