 机器手臂夹子的制作
机器手臂夹子的制作

第1步:材料清单:
3D零件
1x 623zz滚珠轴承
1x M3 15mm螺栓+垫圈
2x M3 6mm螺栓
2x SG90或MG90(推荐)伺服电机
1x M2.5 10mm
一些短橡皮筋
粘性EVA泡沫用于增加爪的抓地力
步骤2:装配你的机器人夹具
1)从这里获取STL文件(Thingiverse)按照指示打印它们:20%填充和PLA灯丝将完成这项工作。小心清洁零件,去除任何塑料毛刺,元件之间的任何摩擦都会使爪在移动时脱离。

2)将623zz滚珠轴承插入左钉孔。您可能需要一把小锤子来正确放置它。钉子的良好对齐将取决于您将轴承插入其通道的程度。将使用15毫米M3螺栓+垫圈将钉子固定到底座上。请参阅上面的照片以供参考

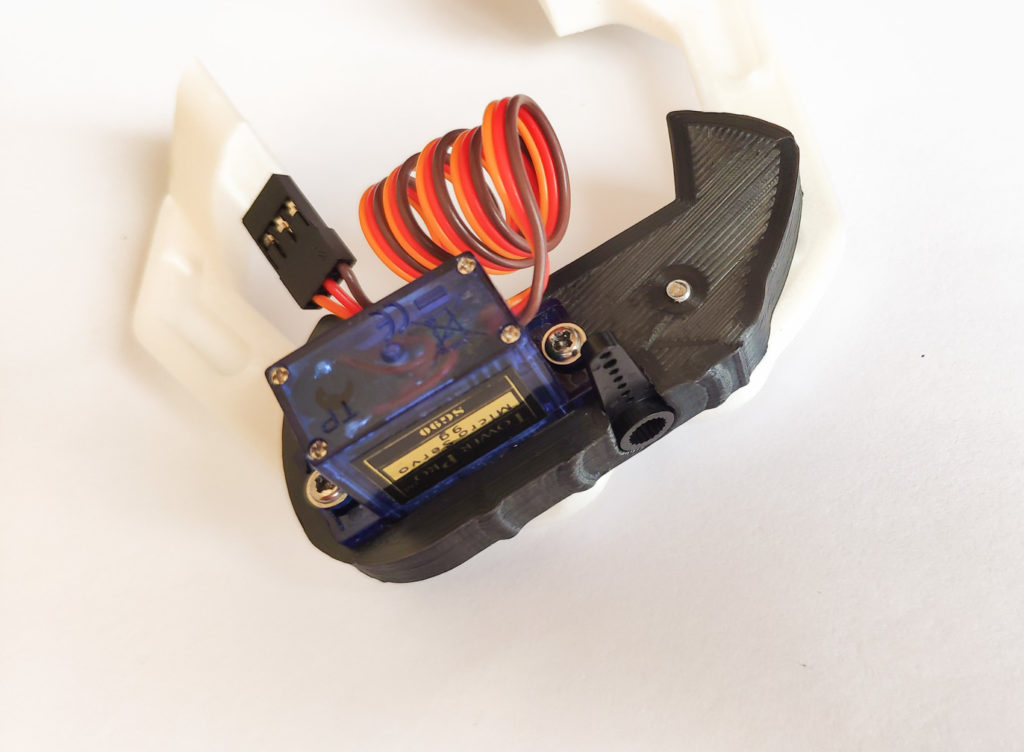
3)放置舵机。在这种情况下,我们使用两个不同的伺服模型, SG90 (蓝色)和 MG90 (黑色)。差异:齿轮,MG90有金属齿轮,所以它会比SG90(尼龙齿轮)持续一点点。此外,MG90将显示更少的反弹。使用伺服袋中的螺丝将其固定在机器人手柄的底座上。
使用M2.5螺栓将 WRIST 伺服固定到基座。检查下面的照片。在基座的沟槽中插入单臂喇叭。它将在夹具的手腕旋转期间保持伺服对准。

此照片显示已放置指甲的机器人抓手。 此时忽略这一点。您将在稍后组装它们
看一下上面的照片,为了放置WRIST的伺服电机,按照指示插入喇叭。

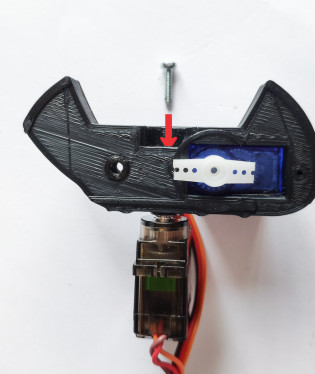
现在是时候放置机器人抓手伺服器了。注意这一步,否则,爪子将关闭或正确打开。首先,您必须找到伺服的逆旋转角度的旋转限制(照片1)。找到它之后,将《将喇叭拿出并将其放回原位,但如照片数字1:所示完全水平。然后,顺时针旋转它90º ,现在它已准备好接收NAIL。 剪切照片中的指示 。

抓手的当前状态。看不到钉子
注意:此夹子设计为 3D打印。它易于打印,但是每个3D打印机制造的对象都有它的缺点。如果拧紧螺钉太多,则可能会破坏碎片或增加摩擦力。如果您注意到夹具的钉子没有自由移动或摩擦力太大,稍微松开螺钉。

如上 所示,将钉子固定在底座上。使用伺服塑料袋内的螺钉(或使用MG90伺服时的螺栓)和带垫圈的 M3 15mm 螺栓连接 LEFT 钉在伺服喇叭上。 请勿将它们拧得太紧,否则伺服将无需工作就可以打开和关闭夹具。所有公差非常小如果您强行使用塑料,它会弯曲增加摩擦力。
为上面/下面拧上2x M3 6mm 螺栓用于橡皮筋


EVA FOAM 《如果你想增加指甲的抓地力,建议使用/strong》。但是你可以使用你周围的任何其他材料用于相同的目的(橡胶?)

粘贴或粘贴FOAM。你几乎就在那里,只需将橡皮筋缠绕在螺栓头上,你就可以开始了。

步骤3:注意:远程控制夹具的简单方法
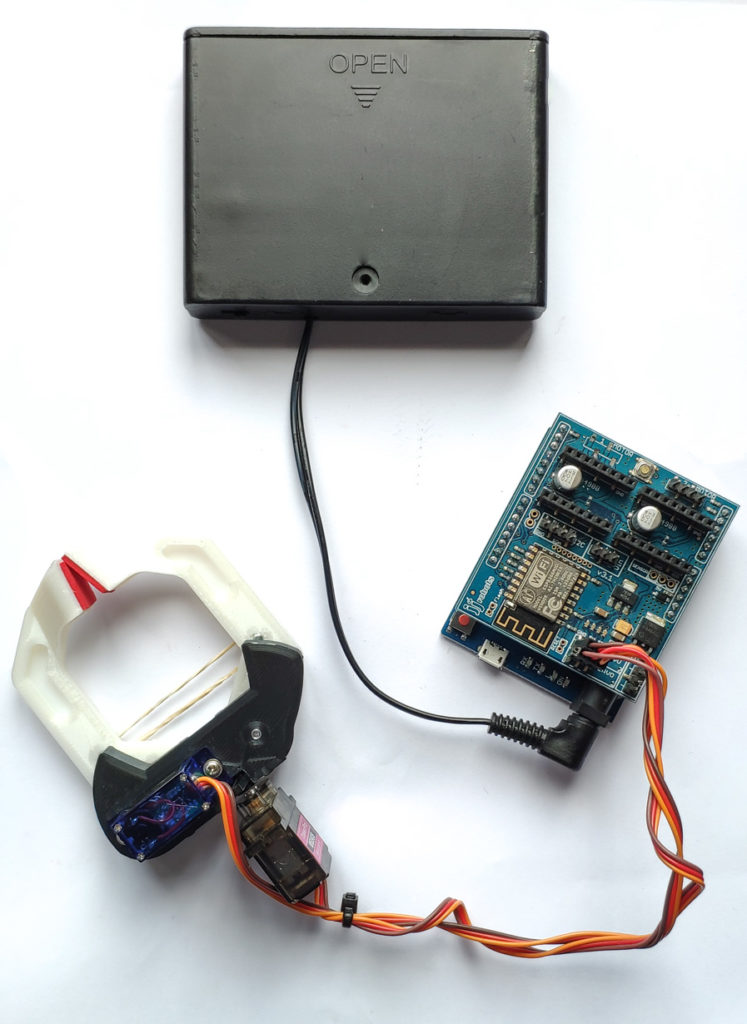
电池座(9V)和脑盾牌控制机器人抓手(+ jjRobots控制APP通过WIFI)
我们使用了大脑盾和Arduino Leonardo“组合”来控制抓手,但任何能够移动2个伺服器的电子设备(并提供高达0.7安培每个伺服)将完成这项工作。这个夹子是与jjRobots SCARA Robotic ARM一起使用的
-
机器手臂
+关注
关注
1文章
19浏览量
11794
发布评论请先 登录
耐达讯自动化Profibus光纤中继器:让机械手臂在电磁风暴中“零误差起舞”
惊!耐达讯自动化Modbus TCP与Profibus 联手,机械手臂竟焕发如此神力!

哇塞!耐达讯自动化RS485转Profibus让机械手臂通信像坐了火箭!

生产线不停摆的“隐形卫士”:优比施UPS电源,精准守护机器人手臂零停机

汽车智造“破界”!PROFIBUS DP转ETHERNET/IP激活机器人手臂超能力
速看!发那科机器人做为profinet转ethernetip主站参数设置,每步都关键

有人这CAN机器手臂控制板的原理图吗?CAN舵机ID无法被识别
焊接工艺革命:CCLink IE转PROFINET网关在汽车零部件生产线,赋能智能手臂的力量

焊接工艺革命:CCLink IE转PROFINET网关智能手臂的力量
开源项目!教你如何制作一个开源教育机械臂
从“零”到“联”:Profinet转Ethernet/IP网关搞定发那科机器手臂
未来已来,2025人形机器人量产启航!泰科机器人成功斩获近千万订单

ABB机器人(机械手臂)数据采集到MES系统解决方案

ABB机械手臂(机器人)数据采集物联网解决方案

40个激光雷达!苹果布局机器人感知系统,让碰撞降低63.7%






 工商网监
工商网监
评论