 交互式无接触灯的制作
交互式无接触灯的制作

第1步:我们需要什么
电子产品:
1。 2 x 22M欧姆+电阻器 (电阻值越大,传感器反应越远,我个人使用22M欧姆,获得可用数据的最小值为10M欧姆)
2。 3x 330欧姆电阻
3. 电线
4。 乙 readboard
5 即可。 电路板(我的铜条连续不断)
6。 多个常见的阴极RGB Leds (我使用8,但你可以或多或少取决于你想要多少光)
7。 铝箔
8。 Cling wrap
9。 Arduino Uno
10。 录像带
案例:
1。 Wood 我使用的是50 x 50 x 1.8 CM MDF(你可以使用任何东西。这取决于你想要的效果和你可以使用的工具)
的 2。 亚克力有机玻璃我使用50 x 50 x 0.3 CM(或任何其他透明/半透明材料,如宣纸)
3。 砂纸(细砂纸)
4. 木胶
5. 胶合板(可选)
6. 丙烯酸胶
工具:
剥线器
烙铁+锡
Stanley刀
钻
锯(我用过台锯)
第2步:原型设计:
现在我们有了一切,我们可以开始制作原型,看看它是如何工作的:
准备工作:
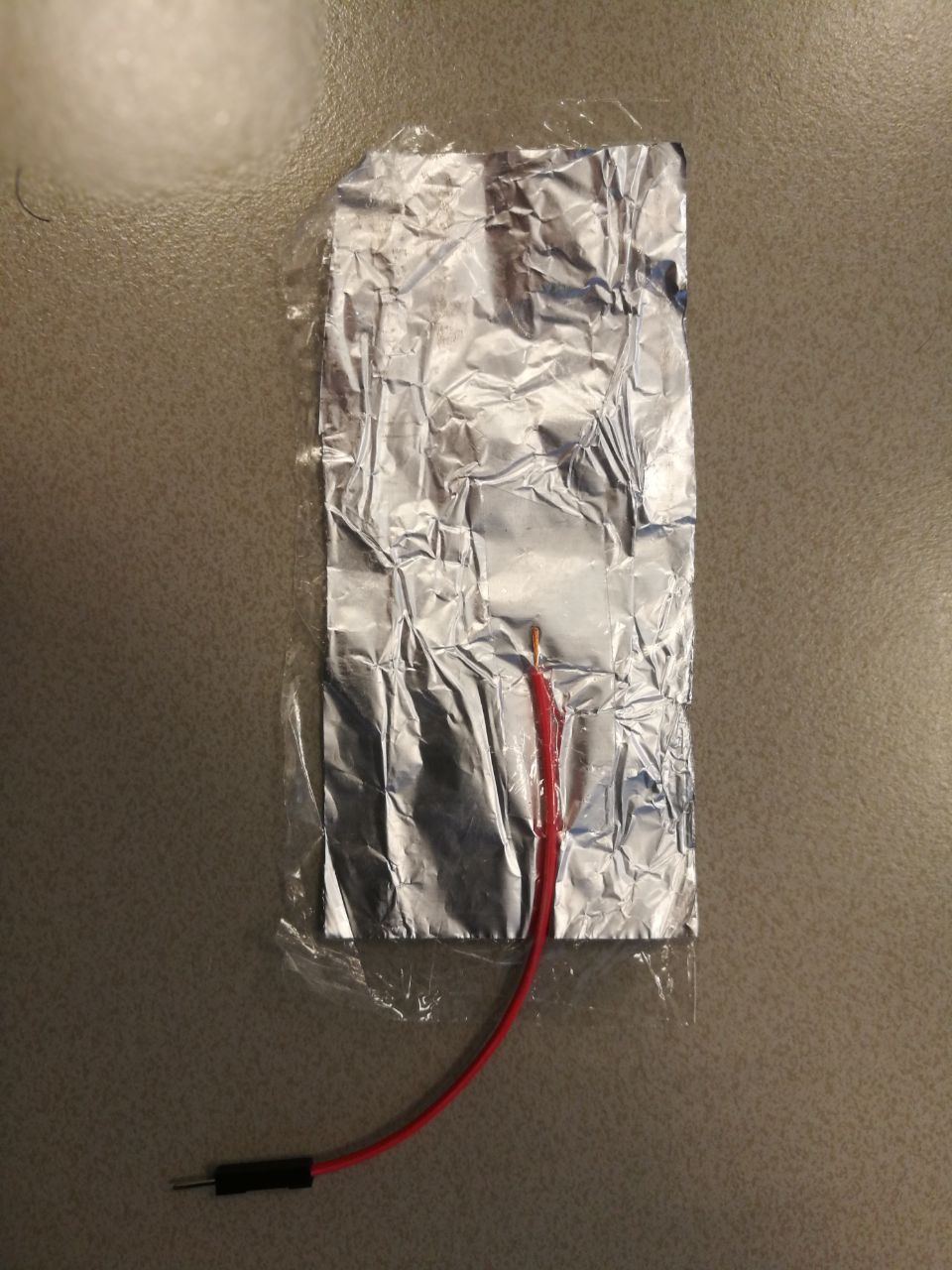
从铝箔上切下4个矩形(我的大约10厘米乘5厘米),将它们用保鲜膜包裹起来,以防止它们直接接触并将电线粘在铝箔上。我只是在箔上剥了一个剥离的末端(只要它们保持接触)。
为了确保铝是安全绝缘的,我用保鲜膜包好并在纸之间熨烫(只需几秒钟)所以它没有完全融化。)
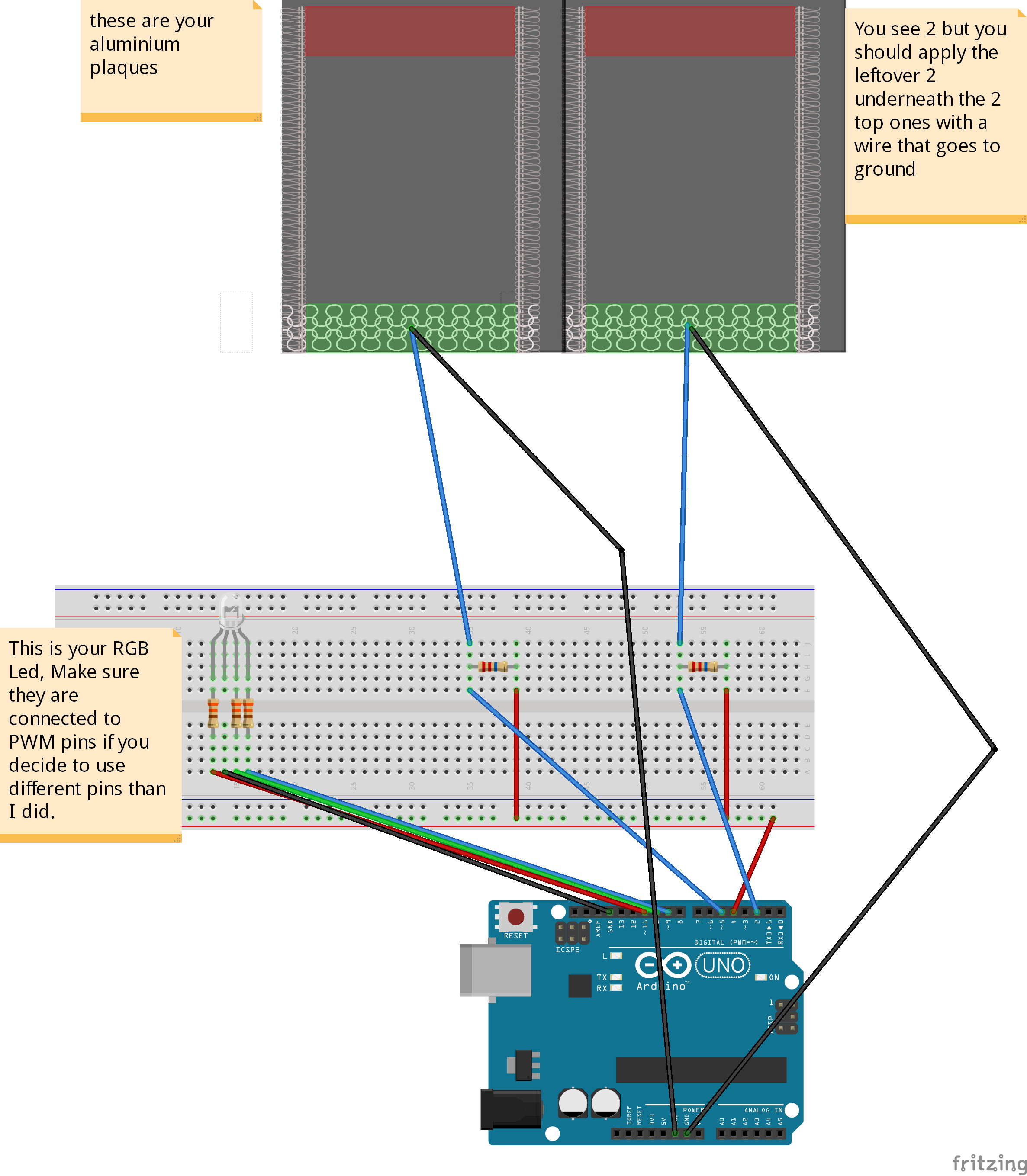
然后设置电路,如图所示。
引脚4用作两个传感器的发送引脚,而接收引脚是引脚2和5.您可以使用多个发送引脚,但由于它们不是完全同步而导致故障。
在将所有内容焊接在一起之前使用此设置进行调试,以确保一切真正按预期工作。
步骤3:代码:
现在我们拥有一切,我们可以开始调试传感器了。
要使用我的代码,你应该从Arduino下载电容感应库并按照参考页面给出的指示进行安装:点击我
代码:(我不是非常适合编码,所以如果你知道如何更好地做,请做)
#include //import the code library
CapacitiveSensor cs_4_2 = CapacitiveSensor(4,2); //Send pin = 4, receive are 2 and 5
CapacitiveSensor cs_4_5 = CapacitiveSensor(4,5);
const int redPin = 11;
const int greenPin = 10;
const int bluePin = 9;
const int numIndexR = 10; // array size
const int numIndexG = 10;
int colorR = 0;
int colorG = 0;
float colorB = 0;
int indexR [numIndexR];
int posIndexR = 0;
long totalR = 0; //it needs to be a long because the total of my array was to big for an integer.
int averageR = 0;
int indexG [numIndexG];
int posIndexG = 0;
long totalG = 0;
int averageG = 0;
void setup()
{
pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
for (int thisIndexR = 0; thisIndexR 《 numIndexR; thisIndexR++) { //sets the array to 0
indexR [thisIndexR] = 0;
}
for (int thisIndexG = 0; thisIndexG 《 numIndexG; thisIndexG++) {
indexG [thisIndexG] = 0;
}
colorR = 255; //turns on all leds colors
colorG = 255;
colorB = 255;
Serial.begin(9600);
}
void loop()
{
long start = millis();
long total1 = cs_4_2.capacitiveSensor(10); //Save the raw sensor data to a variable
long total2 = cs_4_5.capacitiveSensor(10);
if (total1 》= 4500){ //cap the sensor values to a usable maximum, this is not the same for every resistor value and also might differ a bit from environment to environment you might need to tweak this to your own needs.
total1 = 4500;
}
if (total2 》= 4500){
total2 = 4500;
}
totalR = totalR - indexR[posIndexR]; //this here creates an array that continuously adds a sensor output and produces the average.
indexR[posIndexR] = total1;
totalR = totalR + indexR[posIndexR];
posIndexR = posIndexR + 1;
if (posIndexR 》= numIndexR){
posIndexR = 0;
}
averageR = totalR / numIndexR; //we use the average instead of the raw data to smooth out the output, it slows the process down slightly but it also creates a really nice smooth flow.
totalG = totalG - indexG[posIndexG];
indexG[posIndexG] = total2;
totalG = totalG + indexG[posIndexG];
posIndexG = posIndexG + 1;
if (posIndexG 》= numIndexG){
posIndexG = 0;
}
averageG = totalG / numIndexG;
if (averageR 》= 2000 ){ // we don‘t want the leds to constantly changes value unless there is input from your hand, so this makes sure all lower environmental readings are not taken into account.
colorR = map(averageR, 1000, 4500, 255, 0);
}
else if (averageR 《= 2000){
colorR = 255;
analogWrite (redPin, colorR);
}
if (averageG 》= 1000 ){
colorG = map(averageG, 1000, 4500, 255, 0);
analogWrite (greenPin, colorG);
}
else if (averageG 《= 1000){
colorG = 255;
analogWrite (greenPin, colorG);
}
if (colorR 《= 125 && colorG 《= 125){ //B works a bit different because I only used 2 sensors so I mapped B on both sensors
colorB = map(colorR, 255, 125, 0, 127.5) + map(colorG, 255, 125, 0, 127.5);
analogWrite (bluePin, colorB);
}
else{
colorB = map(colorR, 255, 125, 127.5, 0) + map(colorG, 255, 125, 127.5, 0);
if (colorB 》= 255){
colorB = 255;
}
if (colorB 《= 0){
colorB = 0;
}
analogWrite (bluePin, colorB);
}
Serial.print(millis() - start); //this is for debugging purposes
Serial.print(“ ”);
Serial.print(colorR);
Serial.print(“ ”);
Serial.print(colorG);
Serial.print(“ ”);
Serial.println(colorB);
delay(1);
}
这段代码的作用是从传感器中提取原始数据(这些数据总是会略微不稳定,因为影响传感器的所有不同因素)并且它将原始数据连续地放在一个数组中,当数组达到最大值(在我的情况下为10)时,它清除最后一个值并添加一个新值。每次添加一个值时,它都会计算平均值并将其放入一个新变量中。此平均变量用于将值映射到0到255之间的值,这是我们写入RGB引脚以增加每个通道亮度的值(通道为R G和B)。
现在,如果您将代码上传到arduino并打开串行监视器,当您将手悬停在每个传感器上时,您应该看到RGB值较低,而且LED的浅色也应该更改。
步骤4:现在为案例:


案例:我使用我大学提供的工具制作了这个案例,因此这个工作流程并不适用于所有人。然而,没有什么特别之处,它需要一侧的孔让USB端口适合穿过,但除此之外它只是一个敞开的顶盒。
尺寸如下:
15 x 15 CM用于透明顶部
和
15 x 8 CM用于木制基地(木材的厚度对我来说是1.8厘米)。
我用台锯将MDF板切成我需要的正确尺寸(这是4个面板15 x 8 CM和1 15 x 15 CM接地面板),之后我将角切成45度角。我使用木胶和夹子(让它至少干燥30分钟)粘在一起的所有部件,我使用相同的程序用于树脂玻璃,但使用特殊的锯片。
其中一个木质边应该在arduino USB插头高度的中心有一个孔,以便插入arduino。
我完成了单板的基础。我把它切成比每边的表面略大的碎片。
我粘上它,然后将它夹在每一边30分钟(更好的是单独做,所以你确保它不会滑动干燥之后,我将切掉的东西切掉了。
我用Acryl特有的胶水粘在一起称为Acryfix。
请注意,如果你使用丙烯酸树脂胶,胶水稍微溶解有机玻璃,因此尽可能精确和快速(它在几分钟内干燥,但在几秒钟内暴露在空气中)。
为了完成盖帽,我用喷砂机擦拭了立方体但你也可以使用细砂纸,只需要花费更多的时间使它看起来均匀。但要注意,如果你使用砂纸需要细粒度,并在结霜程序后将部件粘在一起(所以你不要破坏它意外地施加很大的压力)
为了确保盖子不会滑到太多,我在木制立方体的边缘粘了几个小木条。
第5步:最终结果应该是这样的:

第6步:焊接!

如果您有电路板,您可以使用面包板所具有的相同设置开始将所有部件焊接在一起。
我的电路板有连续的铜条,便于使用。
对于每个传感器,我切掉一个小方块,将电阻器和电线焊接到。
发送线(从引脚4到每个传感器的导线)按顺序焊接到一个单独的方形,1根导线进入引脚4.
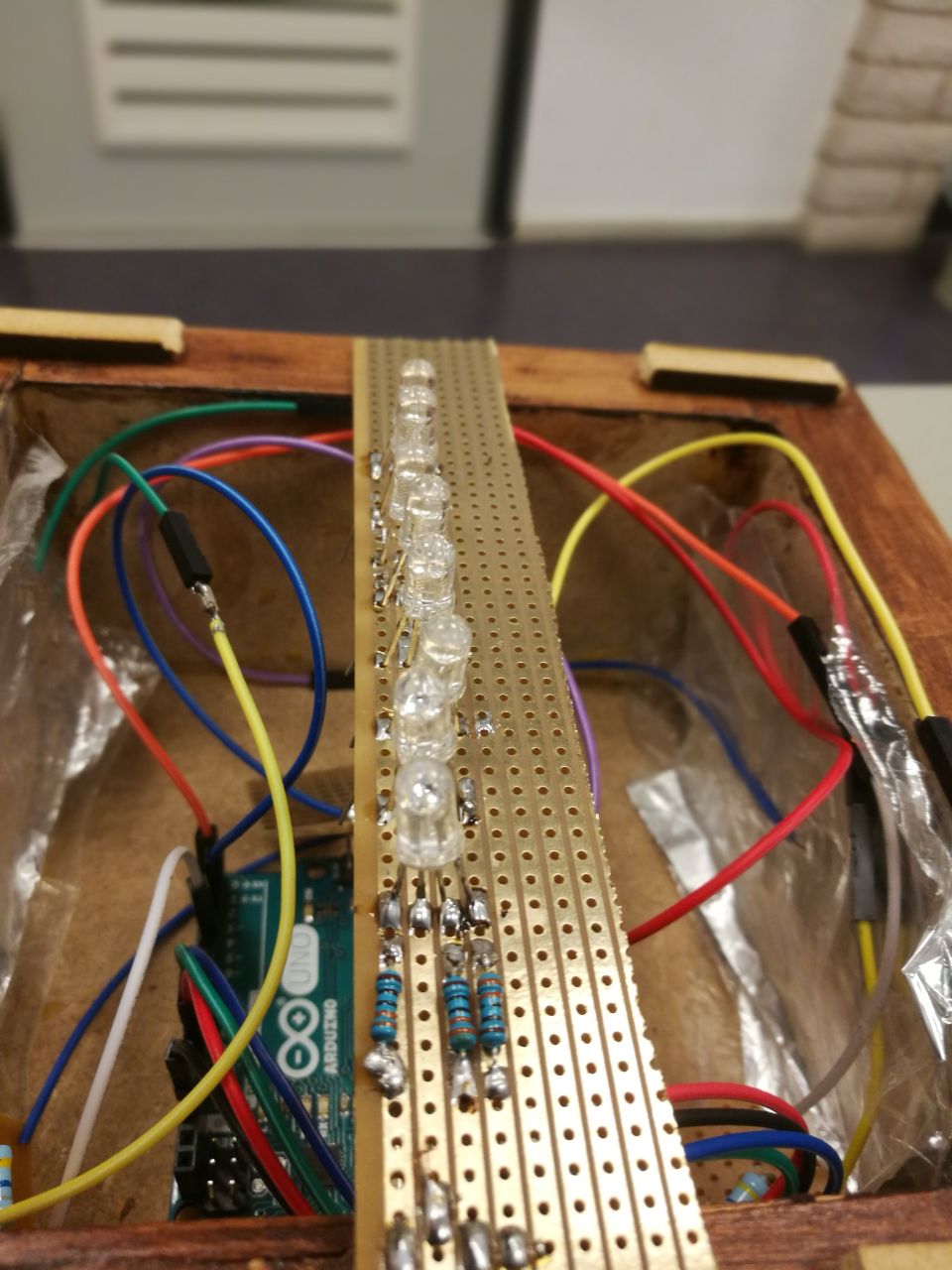
我保留了一个长矩形,用于制作一个简易的LED条(测量它,使其适合帽的内部,但在基座的边缘)。你可以按顺序依次焊接LED(请记住图像我偶然焊接电路板错误一侧的LED和电阻,铜条应始终位于底面)。
将各个部件焊接在一起后,将它们装入外壳中。我没有将我的单根电线焊接在一起,所以如果需要我可以轻松地将它们更换。
时间让所有东西都融入基地:
这是最简单的步骤,arduino需要首先通过USB端口穿过背面的孔这个案子。现在添加传感器,确保传感器箔片两侧贴合木材,地面箔片直接贴在上面。当它完全适合时,将RGB LED插入右侧引脚(9,10,11)并让它靠在底座的边缘。
第7步:完成!
如果您已完成所有这一切,您现在应该有一个带电容式触摸颜色混合的工作灯。
-
传感器
+关注
关注
2577文章
55506浏览量
793964 -
Arduino
+关注
关注
190文章
6527浏览量
197466
发布评论请先 登录
SGM37863A:无电感LED闪光灯驱动器的卓越之选
无接触感知生命体征的黑科技


【应用方案】聪明的车灯会说话,艾为突破性方案助力车灯交互升级

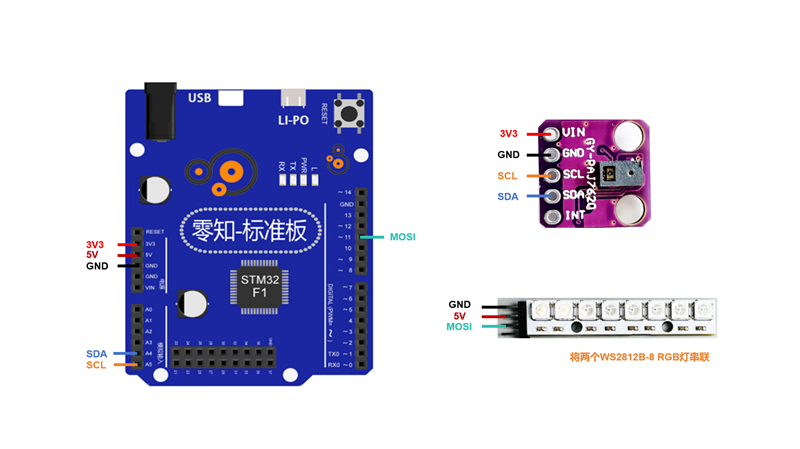
零知IDE——基于STM32F103RBT6的PAJ7620U2手势控制WS2812 RGB灯带系统
思必驰助力智元精灵G2重新定义工业级交互式具身作业机器人
AMD Alveo MA35D加速器:开启大规模交互式流媒体新时代
非接触式位移传感器:以无形之触,丈量工业未来


非接触电容式液位传感器:深耕多领域的“无接触监测专家”

电容式液位传感器和传统接触式液位传感器比有什么优势?
非接触式位移传感器:工业测量的“隐形守护者”
河南移动携手华为完成交互式UE Logo全球首呼
OBOO鸥柏丨AI室外触摸屏查询一体机户外交互式触控终端信息发布大屏招投标标底参数要求

中山大学:用于呼吸识别和非接触式人机交互的均匀快速响应湿度场传感阵列的可扩展制备




评论