 关于自主泊车系统的分析和介绍
关于自主泊车系统的分析和介绍

项目介绍:
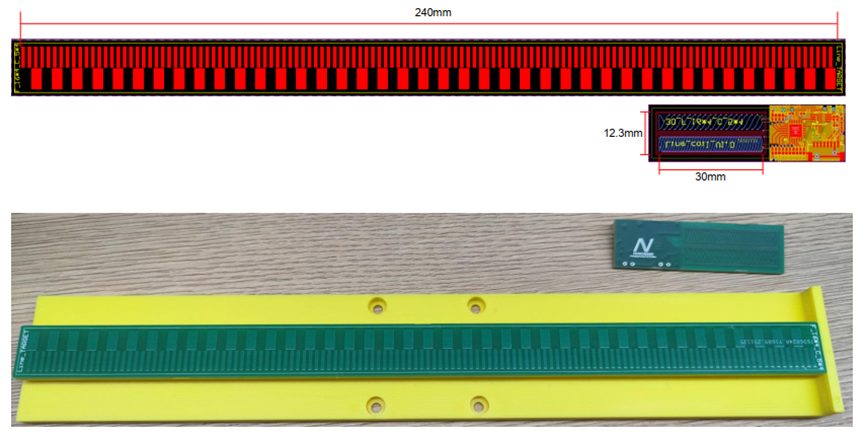
自主泊车系统方案来自英飞凌汽车电子产业化合作伙伴。自动泊车系统可以使汽车自动地以正确的停靠泊车位,该系统包括环境数据采集系统、中央处理器和车辆策略控制系统,所述的环境数据采集系统包括图像采集系统和车载距离探测系统,可采集图像数据及周围物体距车身的距离数据,并通过数据线传输给中央处理器;中央处理器采用英飞凌 SAK-XC2336B-40F80L AA,将采集到的数据分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据上述参数做出自动泊车策略,并将其转换成电信号;车辆策略控制系统接受电信号后,依据指令做出汽车的行驶如角度、方向及动力支援方面的操控。本项目将在已经开发出的原理样机的基础上,结合产品样机的要求,进行系统的可靠性研究、匹配性试验以及生产工艺的优化,以改进系统的稳定性和可靠性,降低成本,满足产品的使用性能。结构组成如下图所示。

性能指标:
泊车最大行驶速度 10Km/h
在目标停车位置上与其他两辆相邻汽车的平行距离 30cm
最小停车位长度 1.5倍车身长度
正常工作温度:-40~85℃;
存储温度:-40~125℃;
ECU通过相关环境、机械试验,具有过流、过电压、短路等常规保护功能;
ECU符合EMC要求;
产品图片:
英飞凌战略商务项目部负责亚太区产业化合作伙伴网络及生态圈的运作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自动泊车
+关注
关注
0文章
106浏览量
14383 -
中央处理器
+关注
关注
1文章
126浏览量
17126
发布评论请先 登录
相关推荐
热点推荐
多模态感知大模型驱动的密闭空间自主勘探系统的应用与未来发展
数据,可实现矿山、隧道、储油罐等密闭空间的自主勘探与智能分析,以下从技术架构、核心功能、应用场景、技术优势、挑战与未来方向五个维度展开解析: 系统软件供应可以来这里,这个首肌开始是幺伍扒,中间是幺幺叁叁,最后一
国货当立!PA 系列功率分析仪:自主创新铸就测量新标杆
本文导读当技术自主成为产业发展的核心命题,当不当言论刺痛民族情感,国产替代不再是单纯的市场选择,更是关乎产业安全与民族自信的必然之路。关键测量权,必须掌握在自己手中。在这条自主之路上,致远仪器PA

光庭信息与为旌科技自动泊车PoC项目通过主机厂验收
近日,光庭信息与战略合作伙伴为旌科技,基于为旌御行车载芯片平台VS919共同开发的全自动泊车(APA)与全景环视(AVM)融合系统的PoC项目,已成功通过国内某知名主机厂的严格验收。

能耗管理系统的国产化趋势:自主技术赋能节能产业
能耗管理系统的国产化趋势:自主技术赋能节能产业 在 “双碳” 目标推进与自主创新战略深化的背景下,我国能耗管理系统行业正加速从 “依赖进口” 向 “
看似简单的自动泊车需要哪些技术支撑?
[首发于智驾最前沿微信公众号]要实现自动泊车,背后需要哪些技术作为支撑?自动泊车作为现在很多车主应用非常多的一项功能,看似只是简单的入库操作,但想要完美入库,其实需要非常多的技术支持。 感知

关于系统链接脚本的介绍
一、队伍介绍
本篇为蜂鸟E203系列分享第四篇,本篇介绍的内容是系统链接脚本。
二、如何实现不同的下载模式?
实现三种不同的程序运行方式,可通过makefile的命令行指定不同的链接脚本,从而实现
发表于 10-30 08:26
新能源汽车自动泊车超声波传感器铝电解电容供电稳定
保障超声波传感器稳定供电的重要元件。本文将深入探讨铝电解电容在新能源汽车自动泊车系统中的关键作用,分析其技术特点及未来发展趋势。 在自动泊车系统

自主生产:制造业的未来
正在发生变化,需要新的技能,例如在数据分析、系统监控或人工智能辅助决策领域。企业的竞争优势:对市场需求做出更快的反应,高效率的个性化生产。责任与道德:如果自主系统出错,谁来承担责任?在
发表于 09-15 15:08
告别进口依赖!ZGAD250S14,国产频谱分析仪核心芯片的自主可控之选
仪的动态范围、分辨率和实时性提出了更高要求。本文将深入解析超外差式频谱分析仪的系统架构,重点介绍ZYNALOG徴格半导体自主研发的高速ADC芯片ZGAD250S14如何突破传统瓶颈,为

比亚迪推L4级智能泊车!企业兜底,技术碾压竞对?
电子发烧友网报道(文 / 吴子鹏)日前,比亚迪汽车在官方微博宣布,在全球率先实现媲美 L4 级的智能泊车,官方承诺为安全兜底。 智能泊车,更多车企愿意称之为自动泊车,是车辆通过传感器、摄像头
HY-M8&M16 动态信号测试分析系统介绍
HY-M8&M16动态信号测试分析系统介绍
HY-M8/16是一款西安环测自动化技术有限公司高性能数据采集分析的动态信号测试分析
发表于 06-25 11:41



评论