 关于GPT12正交编码器输入译码开发案例的分析和介绍
关于GPT12正交编码器输入译码开发案例的分析和介绍

案例内容概览
1.1 功能开发需求
1.3 GPT12解码原理
1.4 MCU引脚资源分配
1.5 GPT12时钟源
1.6 GPT12的Port配置
1.7 GPT12的增量接口配置
1.8 代码实现
1.9 问题与解决
1.10 附录-增量编码输入示波器波形
(1)正转
(2)正转清零
(3)反转
1.1 功能开发需求
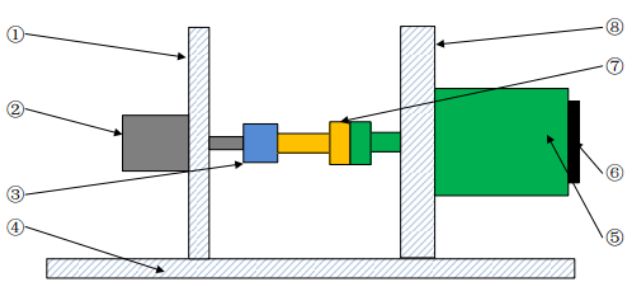
在某款汽车电子产品的电机转子位置RPS传感器的精度性能评价测试中,需采用高精度编码器对电机转子位置进行同轴同步高精度采集,以实现对标电机端RPS传感器是否合格。此图为性能评价测试工装示意图。
工装图注说明:
①编码器工装;②高精度编码器;③刚性联轴器;④工装底座面板;
⑤电机本体;⑥电机位置RPS传感器;⑦爪型联轴器;⑧电机工装侧板。
开发需求:
电机的⑥处位置&角速度传感器的精度需要根据同轴的外部②处的正交编码器进行校准,因此我们需要将ECU捕获到②和⑥的信号进行对比一致性,开发MCU程序实现:由GPT12直接捕获正交编码器A、B、Z三路信号直接结算的模块和功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55875浏览量
795679 -
电机
+关注
关注
145文章
9760浏览量
155063 -
正交编码器
+关注
关注
0文章
16浏览量
10903
发布评论请先 登录
相关推荐
热点推荐
电机磁编码器是什么,电机磁编码器工作原理
电机磁编码器是一种利用磁场变化来精确测量电机转子位置、转速和转动方向的传感器。电机磁编码器的核心优势是抗恶劣环境和高可靠性,在性能上足够满足绝大多数工业、汽车和机器人应用,同时成本和体积远低于传统光学
纳芯微 AMR/TMR 磁编码器正交信号高精度解码
纳芯微(含原麦歌恩 MagnTek)AMR/TMR 磁编码器以磁阻传感阵列为核心,输出与转子角度严格对应的正交正弦 / 余弦(SIN/COS)差分信号。由于制造偏差、安装误差、温度漂移及非理想电路
纳芯微磁编码器正交信号生成与角度解算技术
芯片绝对式磁编码器,集成正交磁敏电桥、模拟前端(AFE)、高精度 ADC、数字校准电路与硬件 CORDIC 角度解算引擎,实现从旋转磁场到绝对角度的单芯片信号链,解决了分立方案正交精度差、延迟高、温漂大等痛点。
纳芯微 AMR/TMR 磁编码器:电路架构与正交信号解码
纳芯微 AMR/TMR 磁编码器以单芯片全集成架构为核心,将正交磁敏电桥、低噪声模拟前端(AFE)、高精度同步 ADC、硬件 CORDIC 解码引擎与多级校准电路深度融合,实现从旋转磁场到绝对
基于正交磁敏电桥的纳芯微绝对式磁编码器:原理、架构与误差补偿
纳芯微绝对式磁编码器(AMR/TMR)以正交磁敏惠斯通电桥为核心传感单元,结合单芯片信号链与数字补偿技术,实现 0°~360° 全角度非接触式绝对测量。本文从正交磁敏电桥工作原理、单芯片系统架构
磁铁在编码器中的作用与应用
在编码器中,磁铁的作用不可小觑,常用的磁性材料主要是钕铁硼和铁氧体,今天这篇文章主要介绍下磁铁用于哪些编码器类型,以及其具体作用。磁铁在编码器中的作用(功能)是什么?在

增量正交编码器:工业自动化的“精密导航仪”
——增量正交编码器。它如同设备的“神经末梢”,将机械运动转化为可量化的数字信号,为工业自动化构建起精密的感知网络。 正交信号:破解旋转方向的“密码本” 贝弗德增量正交
解锁精准运动控制密码:增量式正交编码器的卓越之选
在工业自动化、机器人技术、智能制造等蓬勃发展的时代,精准的运动控制与位置检测成为设备高效运行的核心要素。而增量式正交编码器,宛如一位默默耕耘的幕后英雄,以其卓越的性能和可靠的表现,为各类设备的稳定运行提供了坚实保障。
PEC11J系列12mm SMD长寿命编码器:特性、参数与应用全解析
PEC11J系列12mm SMD长寿命编码器:特性、参数与应用全解析 在电子设备的设计中,编码器是一个关键的组件,它能够将机械运动转化为电信号,为设备的精确控制提供支持。今天我们要介绍
NI数采卡 差分AB正交编码器信号采集
请教一下各位,如何使用NI数采卡采集差分输入AB正交编码器角度信号。
PCIE-6320/6340 usb6210/6421
在不增加差分转单端模块的情况下,如何接线和设置DAQ参数。
发表于 10-20 09:15
绝对值编码器与增量式编码器相比有哪些优势?
绝对值编码器与增量式编码器相比有哪些优势?核心功能:断电后位置信息不丢失,绝对值编码器:通过机械结构或电子存储(如电池备份),能实时输出当前位置的唯一绝对值编码(如二进制、格雷码)。无
VIVADO自带Turbo译码器IP核怎么用?
turbo 译码器IP核没有输出,不知道哪里出了问题,有经验的小伙伴帮忙看看啊
搭建了turbo 译码器IP核测试工程,用Matlab产生的数据源,调用turbo编码器生成编码数据,将
发表于 06-23 17:39
Transformer架构中编码器的工作流程
编码器是Transformer体系结构的基本组件。编码器的主要功能是将输入标记转换为上下文表示。与早期独立处理token的模型不同,Transformer编码器根据整个序列捕获每个to




评论