 怎样用Arduino制作一个可多人控制的机器人手臂
怎样用Arduino制作一个可多人控制的机器人手臂

电池用于为板载伺服电源供电,Arduino由笔记本电脑供电,Arduino的电源和电池是短缺在一起。我不得不使用这种配置,因为Arduino的功率不足以驱动伺服系统,并且使用外部电源可以减少它们中的一些抖动。但是,我必须将Arduino连接到我的笔记本电脑,以便与处理服务器脚本一起运行。
电池连接到LM2596降压转换器模块,降低了3S的11.1V LiPo到~5.8V。这些微伺服系统可能需要高达6V的电压,然而,我将降压转换器调整到略低于5.8V,作为波动或电压读数错误的预防措施。然后,来自降压转换器的Vcc和GND线分成每个伺服器的4个并行路径,GND也短接到Arduino上的一个GND引脚。每个伺服系统还有一条数据线连接到Arduino上的数字引脚。从下图可以更清楚地理解电路原理图。
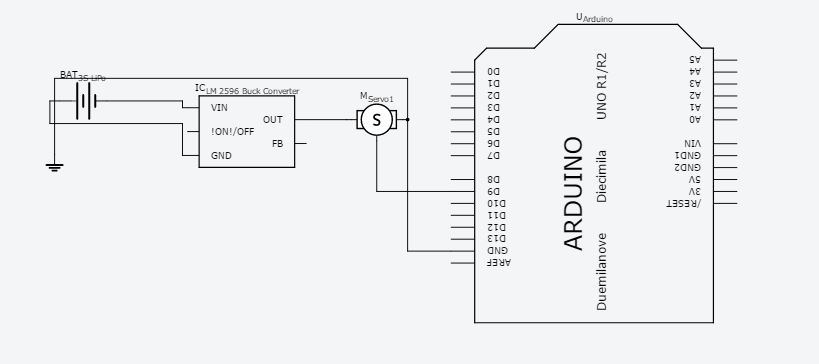
在上图中,忽略FB和On/Off引脚。这与LM2596最相似。伺服Vcc连接到LM2596的输出,其地连接到公共地,其数据引脚连接到Arduino上的GPIO。
多人控制的机器人手臂代码
下一步是上传代码。为此,您需要访问Web服务器。您可以在Raspberry Pi上托管服务器(我们有一个教程),或者购买一些托管服务一两周。托管现在非常便宜。
在这种情况下,Web服务器基本上是云上的计算设备,它将存储您网页的所有代码并存储不同用户发送的投票。现在,只要Arduino发出‘GET请求’,服务器就会将用户收到的投票发送给正在运行Processing 3的Arduino。
我们将Arduino连接到笔记本电脑的原因是这是让Arduino访问网络的简单方法,而Processing 3,而不是Arduino IDE为我们提供了许多强大的工具来添加对机器人的修改。例如声音库。这可以用来收集投票。我们可以将所有用户放在一个地方,而不是用户点击,通过大喊/吟唱同一个单词来物理地尝试获得特定频率。预先固定的频率将启动机器人的不同部分。
投票页面的屏幕截图
多人控制的机器人手臂!
-
Arduino
+关注
关注
191文章
6535浏览量
197743 -
机器手臂
+关注
关注
1文章
20浏览量
11825
发布评论请先 登录
人形机器人手部模块硬件解析与静电浪涌防护方案

六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
注意!注意!Profinet转devicenet与Fanuc机器手臂连接易忽略的小细节

人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制

小型自重构机器人能不能帮忙做一个?
【案例分享】电子谷定制通讯线束:人形机器人稳定律动连接方案

自制巡线解迷宫机器人(上)
用于机器人手臂的基于B3M010C075Z和BTD5452R的三相全桥电机驱动器设计报告
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
【一分钟教程】用ZMC600E实现关节机器人±180度精准转动

生产线不停摆的“隐形卫士”:优比施UPS电源,精准守护机器人手臂零停机




评论