 人形机器人手部模块硬件解析与静电浪涌防护方案
人形机器人手部模块硬件解析与静电浪涌防护方案

随着人形机器人、协作机器人、工业机器人智能化升级,手部执行模块作为机器人末端核心交互部件,承担抓取、操作、力控感知、精密作业等关键功能。区别于机身本体,机器人手部模块体积紧凑、集成度高、运动频繁、外接传感器与执行器件多,同时长期处于动态弯折、电磁复杂、机械震动的工况下。
在自动化产线、人形服务、特种作业等场景中,手部模块常面临静电放电、浪涌冲击、信号干扰、电源波动等电气隐患,极易引发传感器失灵、通讯断连、驱动芯片损坏、动作卡顿等故障。
本文围绕机器人手部模块整体特性、结构组成、硬件接口与电源链路展开全面解析,并结合上海雷卯电子多年工业级、车规级防护经验,针对性输出电源、信号接口专用 ESD、浪涌、EMC防护解决方案,为机器人硬件稳定设计、可靠性升级提供参考。
机器人手部模块构造
机器人手部模块又称末端执行器,是机器人实现精细化作业的核心执行单元,主要分为两指夹爪、多指仿生灵巧手、柔性软体手三大类。广泛适配工业协作组装、物料搬运、精密分拣、人形机器人日常交互、特种环境操作、科研仿生测试等场景,是机器人完成落地实操的关键载体。
从硬件结构与电气架构拆分,机器人手部模块主要由机械结构、动力驱动单元、感知采集单元、控制处理单元、有线通讯接口、供电链路六大核心部分组成。
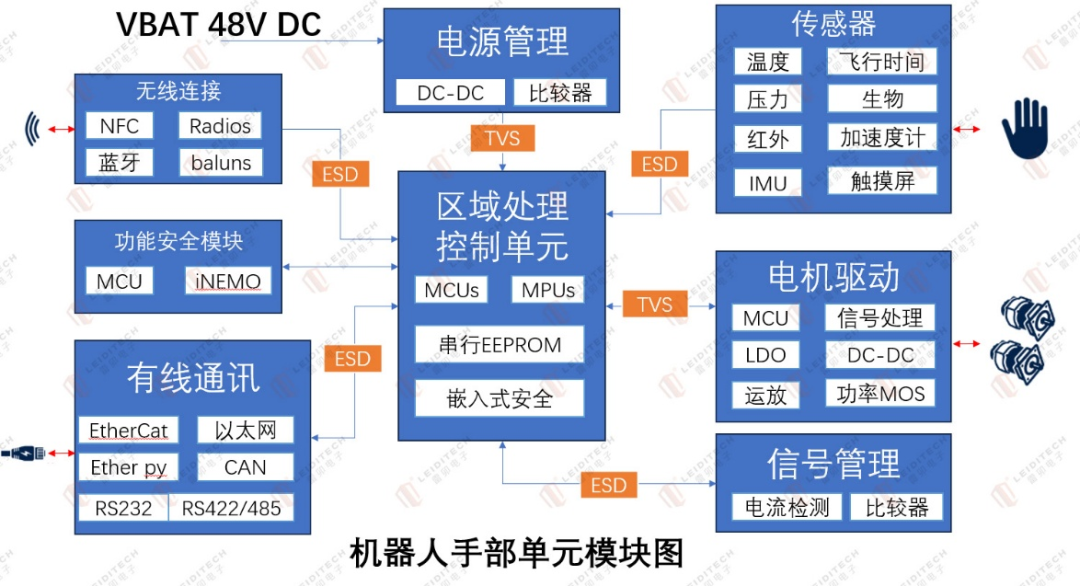
1. 机械结构组件:包含外壳骨架、减速齿轮、传动连杆、柔性连接件、密封防护结构等,负责承载负载、实现手指开合与姿态调节,同时为内部电路板、线材提供物理防护与固定。
2. 动力驱动单元:以微型步进电机、舵机、无刷驱动马达、微型液压/ 气动元件为主,搭配驱动 IC、H 桥驱动电路,是手部动作执行的动力来源,电机启停瞬间会产生反向高压脉冲与电磁辐射干扰。
3. 感知采集单元:集成力传感器、压力传感器、温度检测、触觉传感器、姿态陀螺仪、位置编码器等,实时采集抓取力度、接触反馈、关节角度等数据,信号多为弱电压模拟信号,抗干扰能力弱,易受静电与辐射干扰损坏。
4. 核心控制单元:搭载微型MCU/MPU、驱动控制芯片、存储芯片,负责接收上位机指令、解析动作逻辑、采集传感器信号、闭环控制电机运转,是手部模块的控制中枢,对静电、脉冲冲击高度敏感。
5. 通讯与连接组件:集成内部排线、柔性FPC 排线、外接屏蔽线束,实现手部与机器人小臂主控的信号交互,常用通讯方式包含 CAN、RS485、I2C、SPI、以太网、低压差分信号等。
6. 辅助功能组件:包含指示灯、状态反馈器件、滤波磁珠、常规阻容滤波元件等,用于状态提示与基础杂波抑制。
雷卯电子机器人手部模块
专用防护方案
结合手部模块小体积、高密度、低功耗、运动弯折、户外/工业复杂环境的设计特点,雷卯依托车规级、工业级器件产品线,针对电源回路、各类信号接口定制轻量化、高集成防护方案,兼顾EMC电磁兼容、ESD静电防护、EFT脉冲群、雷击浪涌抑制需求。
1电源回路整体防护方案
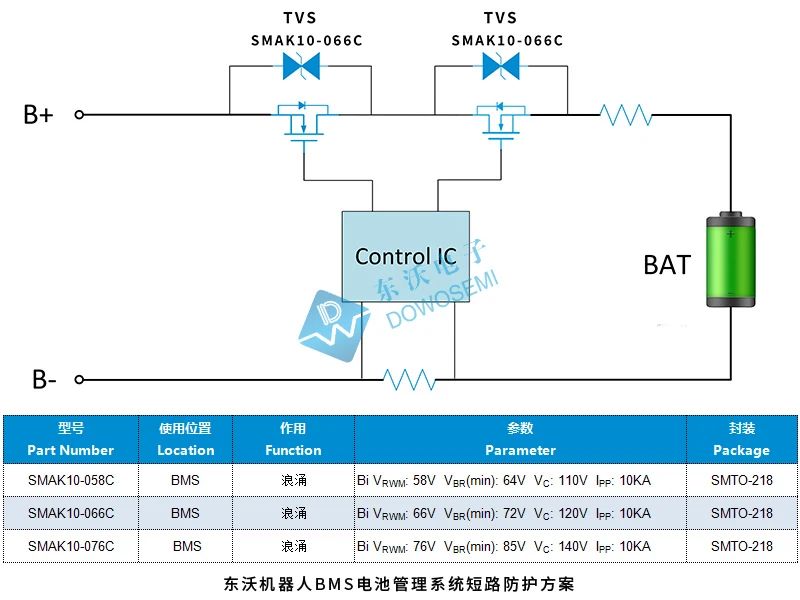
雷卯针对手部模块DC供电入口、DC-DC 前级、电机电源回路三级防护,解决浪涌、反向电动势、电源静电、纹波超差问题。
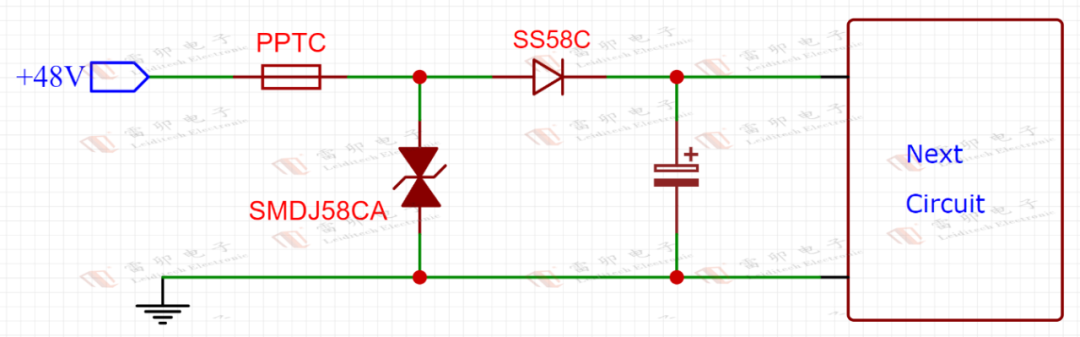
·入口级防护:选用大功率TVS瞬态抑制二极管(SMCJ、SMDJ系列),吸收高压浪涌、感应雷击,耐受高瞬时冲击;搭配自恢复保险丝、防反接二极管,实现过流、反压多重防护。
·电机电源专用防护:在马达驱动电源端并联TVS,抑制电机断电反向电动势,避免高压倒灌烧毁主控与电源芯片。
2通讯接口静电与干扰防护方案
(1)CAN工业通讯接口
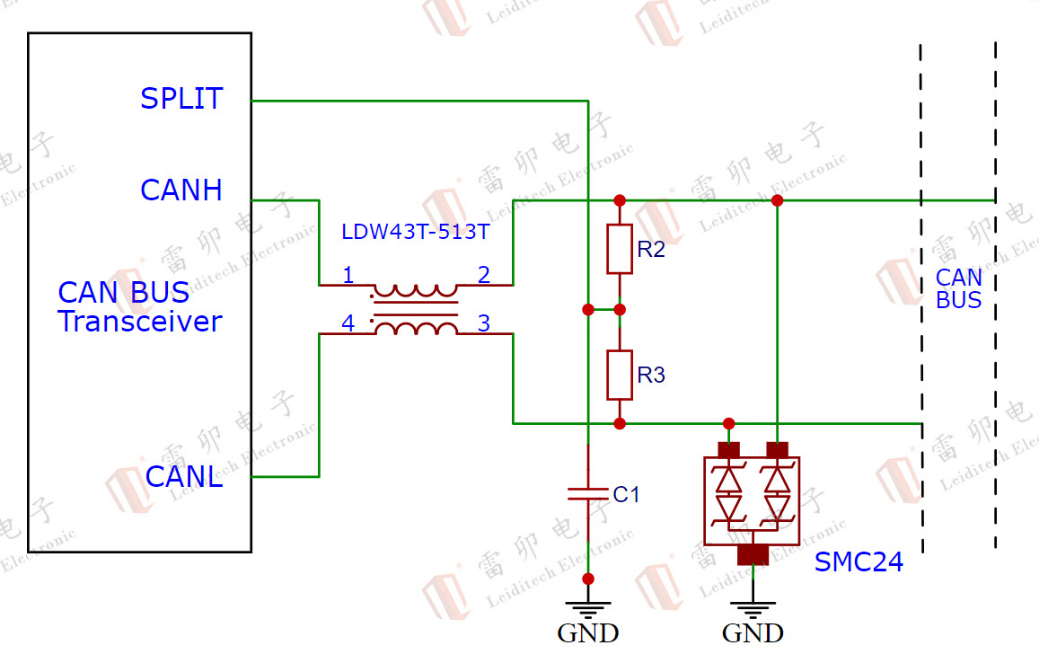
雷卯选用CAN总线专用ESD防静电二极管SMC24、共模电感组合方案,低结电容设计,不影响差分信号传输速率;可承受IEC61000-4-2,等级4,±30kV 接触静电、±30kV空气静电,同时抑制差分线路共模干扰,杜绝通讯卡顿、丢包、总线死机问题。
(2)RS485工业通讯接口
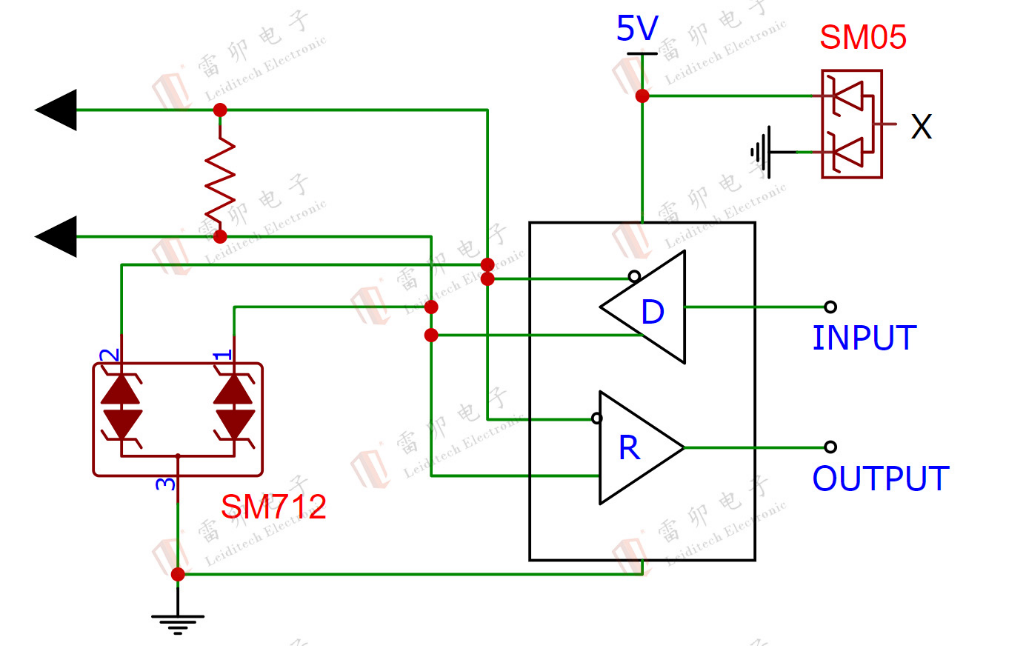
雷卯选用RS485总线专用ESD防静电二极管SM712,可承受IEC61000-4-2,等级4,±30kV 接触静电、±30kV空气静电。
(3)I2C/SPI低速IO接口
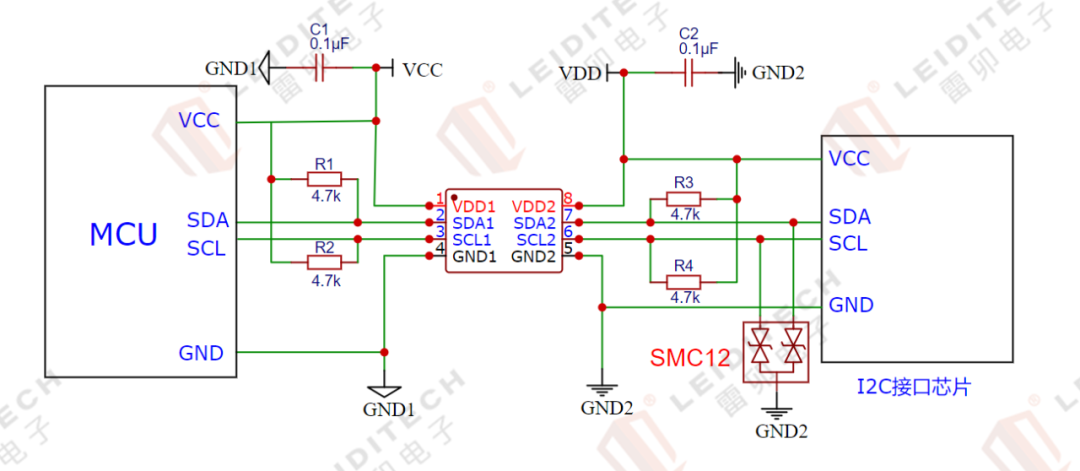
采用微型封装双向ESD阵列SMC12,SOT-23小体积,适配手部紧凑布板;极低寄生电容,保证低速控制信号完整性,解决人体接触、摩擦产生的静电击穿问题。
(4)传感器模拟信号接口防护方案
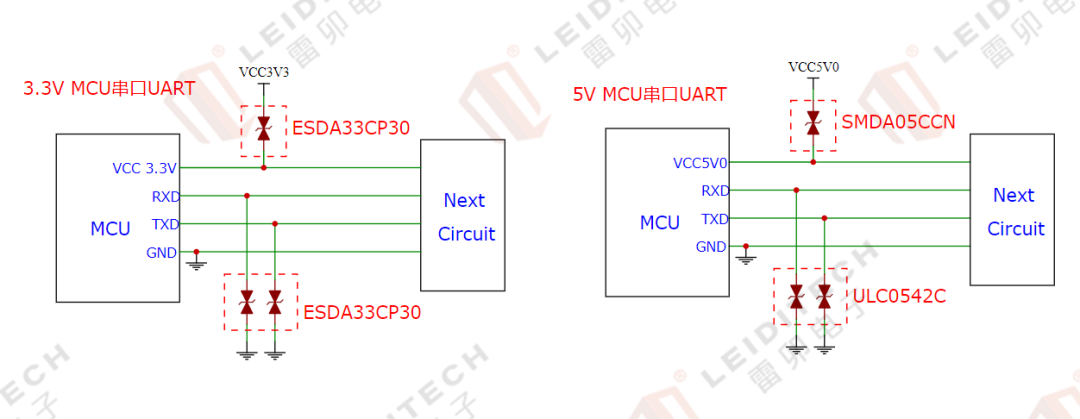
触觉、力控、温度等模拟弱信号电路,耐压低、极易损坏。
推荐使用低容值精密ESD保护器件ULC0542C,0402封装小体积,钳位电压精准、漏电流极低,不影响模拟采样精度;同时搭配高频磁珠、RC 滤波网络,抑制空间辐射干扰,提升传感器数据稳定性,避免信号漂移、采集失真。
雷卯针对机器人灵巧手静电浪涌防护推荐料号 | |||
器件型号 | 核心参数 | 封装 | 防护位置 |
SMAJ58CA | 58V,400W双向,4.3A | SMA | 48V电源防浪涌 |
SMDJ58CA | 58V,3000W双向,32A | SMC | |
SMF58CA | 58V,200W双向,2A | SOD-123FL | |
SMBJ15CA | 15V,600W,双向,24.6A | SMB | 12V二级电源防护 |
SMF15CA | 15V,200W,双向,8.2A | SOD-123FL | |
SMBJ18CA | 18V,600W,双向,20.6A | SMB | MOSFET栅极防护 |
SMC12 | 12V,双向,35pF | SOT-23 | SPI/I2C静电防护 |
SMC24 | 24V,双向,35pF | SOT-23 | CAN总线静电防护 |
SMC24LVQ | 24V,双向,5pF | SOT-23 | CAN-FD总线静电防护 |
ULC3304P10LV | 3.3V,单向,0.28PF | DFN2510P10 | |
SMDA33CDN | 3.3V,双向,35A | DFN1006 | 3.3V电源防静电 |
PTVS0542H100 | 5V,双向,105A | DFN1006 | 5V电源防静电 |
SD1571P6W | 15V,单向,60A | DFN1610 | 12V电源防静电 |
SM712 | 7/12V,双向,45pF | SOT-23 | RS485防静电 |
总结
人形机器人手部模块作为高频运动、高密度集成、人机交互频繁的核心部件,电气可靠性与EMC防护设计不可忽视。电源浪涌、接触静电、电机干扰、长线耦合干扰,是导致手部模块失效的核心诱因。
雷卯电子深耕防护与EMC 领域十余年,针对机器人手部狭小空间、多接口、强弱电混合的硬件特点,可提供单器件选型、组合防护电路、整体EMC防护设计指导、样品免费测试全套技术支持。
通过在电源入口、通讯总线、传感器接口、驱动电路前端增加标准化防护方案,可大幅提升机器人手部模块的环境适应性与长期运行稳定性,助力机器人企业简化设计、降本增效,加速智能化产品落地。
-
静电
+关注
关注
2文章
564浏览量
38384 -
人形机器人
+关注
关注
7文章
1066浏览量
18546 -
浪涌防护
+关注
关注
1文章
115浏览量
5931
发布评论请先 登录
伺服电动缸在人形机器人中的应用
雷安诺科技RJ45-HDMI-USB浪涌静电防护方案应用
RS232端口浪涌和静电防护设计
机器人的主要技术参数
超声电机—机器人手指关节的应用
长距离POE供电模块静电浪涌防护方案

【案例分享】电子谷定制通讯线束:人形机器人稳定律动连接方案

人形机器人颈部关节静电浪涌全链路防护解决方案




评论