当惯导系统的惯性测量部件安装偏离飞机的质心一小段距离时,虽然陀螺仪的输出不会受到影响,但是,由于存在切向加速度和向心加速度,会引起加速度计的测量误差,这种现象称为“杆臂效应”,如果基座安装位置偏离飞机质心一小段距离rp,如图1所示。
2020-07-14 07:55:00 7877
7877 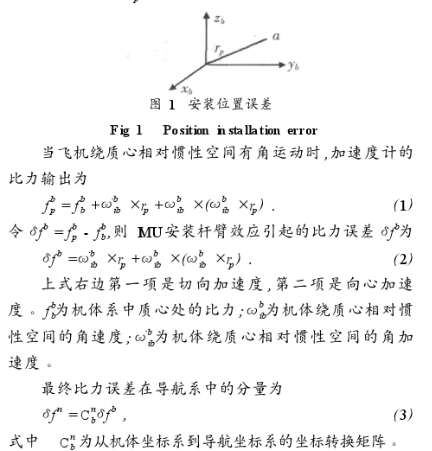
,随着MEMS陀螺仪的兴起,在车辆导航、机械控制等领域,精确导航的竞争一直在对峙。 导航核心——陀螺惯性测量单元 在高精度的捷联惯导系统中,陀螺惯性测量单元是绝对的核心。很长一段时间以来,激光陀螺仪都是中高精度惯导系统
2023-10-24 01:11:003076 导航多用于军事上。(2)惯性导航定位的连续性其他的导航定位系统定位时是一个个点,而惯性导航的地位却是连续的曲线,这也是一大优势。 3、惯性导航的局限当然了,之所以会出现卫星导航,还是因为惯性导航的确
2020-08-14 04:39:59
性导航系统 INS( Inertia Navigation System,以下简称惯导) 惯导是一种利用惯性传感器测量载体的比力及角速度信息,并结合给定的初始条件实时推算速度、位置、姿态等参数的自主
2020-05-18 06:15:18
的物理平台平台式惯导:(下图a所示)惯性传感器安装在一组框架上(平衡环),通过扭矩电机根据陀螺仪感应的旋转来实现平台的旋转,使得平台始终与导航系保持一致。因
2021-09-01 08:06:45
捷联式惯性导航系统
2016-08-17 12:06:13
捷联惯性导航技术,加速度与陀螺仪传感器,控制attach://209539.pdf
2014-08-20 15:15:14
)可发现并标校惯导系统误差, 提高导航精度。(2)弥补卫星导航的信号缺损问题,提高导航能力。(3)增加观测冗余度,提高异常误差的监测能力,提高系统的容错功能。(4)提高导航系统的抗干扰能力,提高完好
2019-07-15 04:35:55
低成本的INS/ GPS 组合导航系统 ,是一类非常适合构建微型捷联惯性导航系统的惯性传感器。MEMS惯性传感器的突出特点使其在众多的民用和军用领域具有广阔的应用前景。
2020-05-18 06:28:30
传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在飞行器导航和姿态测量中得到了广泛的研究和应用。
2020-04-08 08:10:27
Verilog HDL语言有什么优越性Verilog HDL语言在FPGA/CPLD开发中的应用
2021-04-23 07:02:03
哪位高手做过labview捷联惯导仿真?求个仿真程序参考下!!!!!
2010-11-23 15:07:46
项目名称:低成本捷联惯导试用计划:申请理由:本人是一名在读硕士研究生,学习过ARM cortex-M系列内核,熟练使用M3系列内核,对M4内核有些许学习,对捷联惯性导航,嵌入式以及卡尔曼滤波等最优
2019-09-06 11:33:54
C6748核心板模式进行,利用核心板及DSP开发板进行前期算法验证工作。故申请TMS320C6748 DSP开发板免费试用。项目描述:项目用于实现GNSS组合惯导接收机,GNSS卫星信号的解算提供长稳的精度,利用高精度惯导器件提供短稳精度,两者组合采用捷联式惯导进行组合运算,得到高精度的惯导信息。
2015-09-10 11:13:56
随着用户对车载导航定位精准度需求的提高,更多的商家开始攻克车载GPS弱环境下定位难题,目前,SKYLAB的解决方案是在车载导航中接入惯导模块SKM-4DU,多次路测证明,基于惯性和卫星组合导航的惯导
2017-10-12 18:13:02
单片机为什么要使用C语言?8051介绍单片机C语言的优越性
2021-01-27 06:48:18
单片机为什么要使用C语言?单片机C语言的优越性是什么?
2021-10-15 07:48:01
传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有 体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在飞行器导航和姿态测量中得到了广泛的研究和应用。
2019-09-04 08:01:32
什么是RSSI测距?基于RSSI的室内定位算法有什么优越性?
2021-05-31 06:00:18
。惯性导航,通俗的讲就是用加速表和陀螺进行定位解算。这个东西最早是用在飞机,导弹,潜艇,卫星的定位和定姿上,近几十年随着MEMS器件的发展,使得惯性器件成本大大降低了,因此逐渐应民用化。另外GPS和惯导
2014-01-17 21:38:17
传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有 体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在飞行器导航和姿态测量中得到了广泛
2019-08-22 07:27:31
我用adis16365做一款捷联惯导,测试时发现静止时或较小的晃动过后adis16365的陀螺漂移比较小,大约零点几度每秒,但较大的晃动后再静止,漂移变大,能达到约10度每秒,不知是什么原因,是adis16365出问题了吗?还是电路设计有问题?谢谢。
2019-01-18 14:55:38
为什么要设计一个轮式小车惯性导航系统?轮式小车惯性导航系统的软件装置怎样去设计?轮式小车惯性导航系统的硬件装置怎样去设计?如何去测试轮式小车惯性导航系统?
2021-04-19 11:35:46
脉冲电镀电源的优越性及适用性:在脉冲导通期内,由于使用较高的电流密度,使晶核的形成速率远远大于原有晶体的生长速率,因此可形成结晶细致的镀层。镀层结晶细致则密度大、硬度高、孔隙率低,即:大大提高镀层
2011-11-17 17:14:58
适应性强、易维护、寿命长。典型产品是美国诺格斯佩里公司研制成功的Mk39系列和Mk49型激光陀螺捷联式舰船惯性导航系统、美国霍尼韦尔公司的激光捷联惯导系统。光学陀螺的出现有力推动了捷联惯性系统发展。第三代
2020-06-13 08:00:00
为了有效防止捷联惯导系统滤波发散,本文从卡尔曼滤波原理出发,介绍了渐消卡尔曼滤波原理、遗忘因子等内容,通过对渐消因子的推导及计算机仿真,给出了常规卡尔曼滤波器
2009-05-30 08:49:53 24
24 高精度游移方位捷联惯导系统的数字仿真::捷联惯导系统的数字仿真对于系统设计、方案论证和算法研究有着重要的意义,特别是游移方位捷联惯导系统. 因此通过完成轨迹发生
2009-06-21 22:37:3519 研究了光纤陀螺捷联惯性导航系统中数据采集单元的设计与实现。系统选用Intel 80C196KC 单片机作为系统MCU,利用串口扩展芯片TL16C554 实现对三路光纤陀螺信号的数据采集,采用16 位
2009-07-08 16:27:0133 文章简要介绍了WinDriver的性能特点和使用方法,并结合捷联惯性导航系统的实际应用详细讨论了在VC++6.0环境下数据采集程序的编写方法。关键词:WinDriver; VC++6.0;中断;驱动程序;
2009-08-07 14:50:4225 本文利用微型惯性测量元件和 GPS-OEM 板,以ARM 处理器为核心,设计了一种低成本、轻小型的嵌入式GPS/SINS 组合导航系统。文中介绍了捷联惯导的原理和初始对准,给出了采用卡尔曼
2009-08-10 08:36:5845 介绍 ER-FINS-120 高精度高性能光纤惯性导航产品均为捷联式惯性导航产品。该系列惯导产品的基本部件由三个相应等级的光纤陀螺仪
2024-12-25 15:36:33
锂离子电池的优越性能有哪些?
我们经常说的锂离子电池的优越性是针对于传统的镉镍电池(Ni/Cd)和氢镍电池(Ni/MH)来讲的。那麽,锂离子电池究竟
2009-11-04 14:20:031004 提出了一种捷联式惯性测量单元的设计与实现方法。该系统以开环光纤陀螺和硅微加速度计作为惯性敏感元件,采用高速DSP 作为中央处理器实现数据采集、处理及输出。重点介绍了系统
2011-09-13 15:01:5021 传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有 体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在
2012-11-21 09:48:361211 传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在飞行
2013-01-14 10:53:592265 
当捷联惯组(SIMU)安装到载车上存在安装误差时,航位推算误差与安装误差、里程计刻度系数误差、初始对准误差有关。利用捷联惯导系统和航位推算系统构成组合导航系统可实现对上
2013-08-19 17:51:1028 文中针对水下自主航行器提出了一种新型的基于捷联惯导(SINS)和GPS的组合导航系统设计方案。该方案以捷联惯导作为主系统,同时利用GPS重调捷联惯导系统,建立了该组合导航系统的
2013-08-20 11:33:2432 惯导基本知识:惯性导航,利用惯性元件(加速度计)来测量运载体本身的加速度,经过积分和运算得到速度和位置,从而达到对运载体导航定位的目的。
2016-01-07 16:28:360 本论文分上下两篇,用于给现代捷联惯导系统的主要软件算法设计提供一个严密的综合方法:将角速率积分成姿态角,将加速度变换或积分成速度以及将速度积分成位置。该算法是用两速修正法构成的,而两速修正法是具有
2016-12-12 21:50:542 本论文分上下两篇,用于给现代捷联惯导系统的主要软件算法设计提供一个严密的综合方法:将角速率积分成姿态角,将加速度变换或积分成速度以及将速度积分成位置。该算法是用两速修正法构成的,而两速修正法是具有
2016-12-12 21:50:546 捷联惯导系统中微机械陀螺测试参数的分析与标定
2016-12-17 16:33:397 层次分析的惯导_重力匹配导航系统性能评估方法_陈晶
2017-03-19 19:03:122 基于DSP_MCU的小型捷联惯性导航计算机系统
2017-10-20 08:21:0914 1 引言 捷联惯性制导是随着计算机技术的发展而发展起来的惯性制导技术,由于它是用一个数学平台来代替平台式惯性制导系统中的陀螺稳定平台,因而具有成本低、结构简单、体积小、可靠性高等优点。但正是由于没有
2017-10-23 15:43:151 采用商用MEMS传感器设计一种小型捷联惯导系统。该系统利用外部16位AD高速采样芯片进行传感器数据采集,选用两片TMS320F28335DSP作为数据预处理单元和导航解算单元,同时在初始对准和陀螺
2017-11-29 11:21:2722 针对捷联惯导系统中初始对准的问题,本文采用了设计卡尔曼滤波器的方法,通过建立惯导系统的误差模型,分析卡尔曼滤波的基本理论,以东向和北向速度误差进行分析。通过初始对准计算机仿真结果,进一步验证了该方法
2017-12-07 16:26:583 惯性导航系统 INS( Inertia Navigation System ,以下简称惯导 ) 惯导是一种利用惯性传感器测量载体的比力及角速度信息,并结合给定的初始条件实时推算速度、位置、姿态等参数的自主式导航系统.具体来说惯性导航系统属于一种推算导航方式。
2018-04-26 09:06:0071936 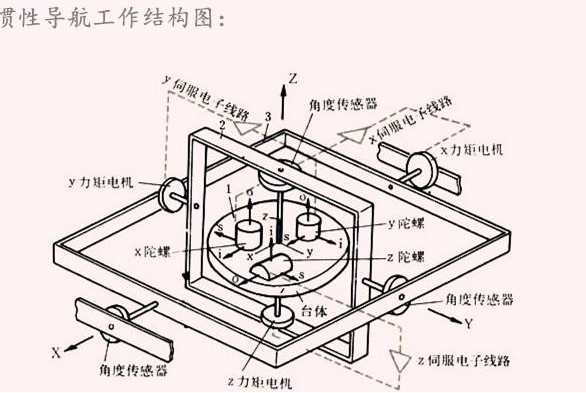
的瞬时速度和位置信息,具有不依赖外界信息、不向外界辐射能量、不受干扰、隐蔽性好的特点,且惯导系统能连续地提供载体的全部导航、制导参数(位置、线速度、角速度、姿态角)。
2018-03-02 16:23:3118989 导航系统无法工作时,利用惯性导航系统使得导航系统继续工作,保证导航系统的正常工作,提高了系统的稳定性和可靠性。惯导模块SKM-4DX特点:GNSS/INS组合导航定位技术;GNSS定位技术:BDS/GPS
2018-03-09 10:17:4425963 说到导航,很多人的第一反应就是基于GPS、北斗、GLONASS、GALILEO的卫星导航,最近SKYLAB推出了一个惯导模块,很多客户就开始懵了,什么是惯导模块,惯导模块有什么用呢?看过来,知识点
2018-03-16 15:54:2240 车载导航领域的车载组合导航模块,采用GNSS/INS组合导航定位技术。凭借高精度六轴惯性器件,和成熟的惯导算法,无需里程计或速度信号接入,且无严格安装要求,即使在隧道、车库等环境下也能为车辆提供高精度
2018-08-08 12:33:404939 满足导航系统设计的小型化、实时性要求,本文提出了一种基于FPGA+DSP的实现方案。该方案的设计思路是:将FPGA映射到DSP EMIF的一段地址空间,并用FPGA来完成多通道信号的采集;DSP根据
2018-11-07 17:18:2310 使用模拟设备的惯性测量单元(IMU)传感器ADIS16470和PNI的地磁传感器RM3100构建的捷联惯性导航系统(SINS)。
2019-04-15 17:39:468507 
惯性导航系统(INS)以其自主的工作能力广泛应用于军事武备的导航、制导与控制系统和国民经济的诸多领域。它的主要缺点是定位误差随其工作时间的增长而增大。对惯导系统的误差进行估计和补偿是在保证性能价格比
2019-09-19 08:00:0015 GPS组合惯导与惯性导航的的应用 即体系包含卫星定位体系(GPS/斗极/GNSS)和惯性定向定位导航体系(INS)的定向定位导航体系。 卫星定位导航体系具有精度高,可通讯的特点,可是需要从外界获取
2020-06-11 11:33:305327 惯导在实现生活中应用的优缺点 惯性导航传感器是传感器众多类型中的一种,是多个行业中不可缺少的检测装置。惯性导航传感器系统一般由一个单片机,三个陀螺仪,和三个加速度传感器组成。 我们在使用惯性导航
2020-03-30 16:33:343748 航空航天飞机中的惯导是怎么工作的 现如今惯导已经更新了几代,大部分分机安装的是高精度捷联式惯导,跟之前笨重的平台式惯导系统比较更方便轻巧。 惯性导航系统(INS)也称作惯性参考系统是一种不依赖于外部
2020-06-11 11:26:094606 GPS组合惯导与惯性导航的的应用 即体系包含卫星定位体系(GPS/斗极/GNSS)和惯性定向定位导航体系(INS)的定向定位导航体系。 卫星定位导航体系具有精度高,可通讯的特点,可是需要从外界获取
2020-03-28 11:24:294461 现如今惯导已经更新了几代,大部分分机安装的是高精度捷联式惯导,跟之前笨重的平台式惯导系统比较更方便轻巧。 惯性导航系统(INS)也称作惯性参考系统是一种不依赖于外部信息、也不向外部辐射能量(如无线电导航
2020-06-15 11:09:199266 海上组合惯导的介绍(关于惯导在海上的应用) 海上组合导航海上组合导航体系大致可分为简易型和大型两类。 简易型组合导航体系选用大规模集成电路、模块结构和微型计算机控制,其长处是结构紧凑、牢靠、简便
2020-03-28 10:19:162388 平台式惯导系统的力学编排是指实现正确控制惯性平台和解算导航参数的方案和方程,包括平台指令角速度的计算公式、速度和位置的解算方程。
2020-03-30 08:00:000 组合惯导的的实际应用介绍 卫星组合惯导定位体系即体系包含卫星定位体系(GPS/斗极)和惯性定向定位导航体系(INS)的定向定位导航体系。 卫星定位导航体统具有精度高,可通讯的特点可是需要从外界获取
2020-06-08 17:12:054552 GPS组合惯导的发展史 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过测量
2020-04-20 10:12:102489 GPS组合惯导的发展路程 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过
2020-04-18 00:34:141288 近年来,广大科研工作者研究了各种减小压电捷联惯导系统的误差方法,使压电惯性器件的精度得到了极大的提高。本文介绍了一种实用的基于DSP实现的压电捷联惯导系统方案。
2020-04-22 10:10:211864 
GPS组合惯导的组成 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基础,通过测量
2020-05-18 15:48:433622 ,并自动进行积分运算获得飞行器瞬时速度和瞬时位置数据的技术。组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息也不向外界辐射能量不易受到干扰,是一种自主式导航系统。捷联式据陀螺仪的不同,分为速率型捷联式惯性导航系统和位置
2020-05-18 16:51:156191 ,是一种自主式导航系统。 INS惯导系统惯性导航系统是一种利用安装在运载体上的陀螺仪和加速度计来测定运载体位置的一个系统。通过陀螺仪和加速度计的测量数据,可以确定运载体在惯性参考坐标系中的运动,同时也能够计算出运载体在惯
2020-05-18 16:59:142850 国内GPS组合惯导的发展 捷联惯性系统由于结构简单、可靠性好、体积小、重量轻、成本低、容易维修等特点,近年来得到很快的发展,并且在一些战术武器中得到应用。由于精度尚未达到平台系统的精度水平,所以
2020-05-18 17:01:021831 惯性测量单元的应用 惯性测量单元用于安装了惯性导航系统的交通工具。如今,几乎每个商业或军事船只都安装了惯性测量单元。大多数飞机也配备了惯性测量单元。同时,惯性测量单元也在飞行器中单独使用,将惯性测量
2020-04-26 11:28:341374 国内GPS组合惯导的发展 捷联惯性系统由于结构简单、可靠性好、体积小、重量轻、成本低、容易维修等特点,近年来得到很快的发展,并且在一些战术武器中得到应用。由于精度尚未达到平台系统的精度水平,所以
2020-04-26 11:10:001676 惯性导航系统是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统,广泛应用在军机、民机、战车、制导武器、火控系统、水下兵器等装备上,其具有如下优点: 应用场景: 在惯导系统的设计验证、生产组
2020-04-27 11:51:442206 车载系统中惯导的应用 从惯性导航的定义来看,惯性导航是一种通过测量飞行器的加速度,并自动进行积分运算,获得飞行器瞬时速度和瞬时位置数据的技术。组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界
2020-06-08 14:41:522580 CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。较之许多RS-485基于R线构建的分布式控制系统而言,基于CAN总线的分布式控制系统在以下方面具有明显的优越性。
2020-06-10 11:12:532283 近年来,惯性技术不论在军事上、工业上,还是在民用上,特别是消费电子产品领域,都获得了广泛的应用,大到潜艇、舰船、高铁、客机、导弹和人造卫星,小到医疗器械、电动独轮车、小型四旋翼无人机、空中鼠标和手机
2020-08-20 08:00:009 惯性导航系统(INS,以下简称惯导)是一种不依赖于外部信息、也不向外部辐射能量的一种自主式导航系统,主要由陀螺仪和加速度计两部分组成。
2020-10-20 16:11:574004 、操作简单、可靠性高,催生了触摸屏武器控制系统的诞生,如美军的单兵触摸式GPS导航仪、德军的触摸式火炮瞄准系统等。我国的捷联惯导系统起步较晚,但由于国内相关器件(如:激光陀螺、加速度计)的制造技术相继
2021-03-29 10:48:304311 
基于视觉/惯导的无人机组合导航算法综述
2021-06-23 15:52:2019 MEMS陀螺捷联惯导系统标定方法综述
2021-08-05 16:54:136 传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点
2022-03-29 11:02:341980 
MEMS 陀螺惯组的数学模型,标定和补偿是提高 MEMS 惯组性能 是一篇值得学习的文章。
2022-07-04 14:50:572 经作者同意不得应用于商业目的。
PSINS工具箱主要应用于捷联惯导系统的数据处理和算法验证开发,它包括惯性传感器数据分析、惯组标定、初始对准、惯导AVP(姿态-速度-位置)更新解算、组合导航Kalman滤波等功能。
2022-10-31 15:36:101 在惯导系统中惯性传感器(陀螺和加速度计)直接与运载体固连,通过导航计算机采集惯性器件的输出信息并进行数值积分求解运载体的姿态、速度和位置等导航参数。
2023-02-21 09:52:251831 在惯导系统中惯性传感器(陀螺和加速度计)直接与运载体固连,通过导航计算机采集惯性器件的输出信息并进行数值积分求解运载体的姿态、速度和位置等导航参数,这三组参数的求解过程即所谓的姿态更新算法、速度更新算法和位置更新算法。
2023-02-21 09:53:273751 MEMS(微机电系统)是指集机械元件、微传感器、信号处理与控制电路、接口电路、通信和电源为一体的完整的微机电系统。MEMS惯性传感器可以组成低成本的INS/GPS组合导航系统。它是一种非常适合构建小型捷联惯导系统的惯性传感器。MEMS惯性传感器的突出特性使其在许多民用和军事领域具有广阔的应用前景。
2023-07-19 09:21:573833 电子发烧友网站提供《CAN总线改造后的客车电控气动换挡系统的优越性介绍.pdf》资料免费下载
2023-11-06 10:00:350 电子发烧友网站提供《使用ADIS16470和PNI地磁传感器RM3100构建的捷联惯性导航系统.pdf》资料免费下载
2023-11-22 10:34:483 全球导航卫星系统(GNSS)模块的惯导技术是一项颇具前瞻性的科技,它结合了全球定位系统和惯性导航技术,为各个领域的定位需求提供了更为精准和可靠的解决方案。本文将深入探讨GNSS模块的惯导技术,以及它
2024-02-01 14:12:111374 舰艇惯导系统通过惯性测量装置获取舰艇运动参数,实现自主、连续、隐蔽的导航,提供航向、速度等关键信息。未来趋势包括高精度化、多传感器融合和自主导航能力提升,为船舶航行带来更多便利和安全。
2024-09-30 15:46:271508
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论