 SINS惯导算法简介
SINS惯导算法简介

SINS 惯导算法简介
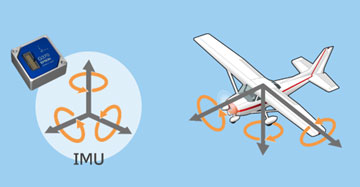
在惯导系统中惯性传感器(陀螺和加速度计)直接与运载体固连,通过导航计算机采集惯性器件的输出信息并进行数值积分求解运载体的姿态、速度和位置等导航参数,这三组参数的求解过程即所谓的姿态更新算法、速度更新算法和位置更新算法。
传统的姿态更新算法有欧拉角法、方向余弦阵法和四元数法等,这些方法直接以陀螺采样输出作为输入,使用泰勒级数展开或龙格–库塔等方法求解姿态微分方程,未充分考虑转动的不可交换性误差问题。传统姿态更新算法在理论上可以通过提高采样和更新频率来提高解算精度,但实际陀螺采样频率又受限于传感器的带宽和噪声水平,因此传统算法的精度提升空间相对有限,仅适用于对解算精度要求不太高的场合。
至此, 从理论上看,在理想的圆锥运动条件下的不可交换性误差补偿问题似乎得到了比较完美的解决。但应当注意到,上述算法都是在Bortz方程二阶近似的基础上推导的,不可避免地存在原理性误差,在大锥角情形下会出现高子样数的圆锥误差补偿精度反而不如低子样数的反常现象。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mems
+关注
关注
129文章
4554浏览量
199891 -
惯性传感器
+关注
关注
2文章
198浏览量
29654
原文标题:MEMS_惯性传感器10 - 惯导算法发展史简介
文章出处:【微信号:SmartHWFW,微信公众号:SmartHWFW】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
pmos导通问题
*附件:QQ20260505-202447.7z
大家好,这个pmos是导通了的,但是当我把负载电阻改的特别小的时候,ids电流会几乎为0,电流是全走体二极管了吗,负载大的时候电流多数走ds,这是什么原因
发表于 05-05 20:39
EPSON六轴IMU传感器高精度惯导模组M-G370/M-G552 IP67防水
EPSON六轴IMU传感器惯导模组,配备三轴陀螺仪和加速度传感器,温度特性高度稳定,M-G370偏置稳定性
芯导科技GaN器件的发展与演进
在文章"提升开关频率(一) 芯导科技MOSFET工艺结构的发展与演进"中,我们介绍了芯导科技MOSFET产品针对高频需求的工艺发展路线。

如何使用NI 9203检测回路导通
在工业控制与数据采集场景中,“回路导通检测 + 异常停机” 是保障设备安全、避免误操作的关键需求。如何使用NI 9203检测回路导通,下面请跟随小编一起来学习一下吧!

SM4算法实现分享(一)算法原理
SM4分组加密算法采用的是非线性迭代结构,以字为单位进行加密、解密运算,每次迭代称为一轮变换,每轮变换包括S盒变换、非线性变换、线性变换、合成变换。加解密算法与密钥扩展都是采用32轮非线性迭代结构
发表于 10-30 08:10
基于E203 RISC-V的音频信号处理系统 -ANC算法简介
ANC算法介绍
主动降噪系统在移动终端中应用最广,例如摩托的丽音、三星Diamond Voice、苹果的Micphone Array等。最早提出使用声波干涉原理进行噪声消除概念的是Rayleigh
发表于 10-28 07:50
如何使用恢复算法来实现开平方运算
本文主要描述如何使用恢复算法来实现开平方运算。
简介
开平方的恢复算法其实与除法的恢复算法十分相似。首先我们假设X为输入的操作数(它应该为正数),而他的平方根可以表示为Qn=0.q1
发表于 10-24 13:33
国密系列算法简介及SM4算法原理介绍
一、 国密系列算法简介
国家商用密码算法(简称国密/商密算法),是由我国国家密码管理局制定并公布的密码算法标准。其分类1所示:
图1
发表于 10-24 08:25
一分钟了解:惯导数据采集板与惯导数据存储板
惯导数据采集板和惯导数据存储板侧重于惯性测量数据的记录与后续分析,对于测试、验证、故障诊断和事后分析至关重要。
测绘级MEMS组合导航系统精度对标分析
精度是测绘级MEMS组合导航系统在无人装备、精密测量等场景应用的核心依据。本文以国产ER-GNSS/MINS-01(以下简称“组合导航01”)与欧洲某著名惯导公司产品为研究对象,从姿态航向精度、定位
网线铝箔屏蔽纸单导还是双导
网线铝箔屏蔽纸通常采用双导结构,即铝箔层同时具备导电和屏蔽功能,且部分设计会结合金属编织网形成双层屏蔽,以增强对高低频干扰的防护能力。以下是对单导和双导铝箔屏蔽纸在网线中应用的详细分析: 单导
船舶深水惯导系统零部件测量方案:三坐标检测四孔行星定位结构几何精度
惯导系统内部关键零部件带4孔定位,内装光纤陀螺仪,安装的陀螺仪需要保障准确的位置度及角度关系,因此,该零件需要对上下顶面的平面度,前后左右圆柱的同轴度、垂直度、各孔的直径以及4孔两两同轴度及4孔的孔
三坐标检测船舶深水惯导系统零部件(四孔行星定位结构几何精度)
惯导系统内部关键零部件带4孔定位,内装光纤陀螺仪,安装的陀螺仪需要保障准确的位置度及角度关系,因此,该零件需要对上下顶面的平面度,前后左右圆柱的同轴度、垂直度、各孔的直径以及4孔两两同轴度及4孔的孔
发表于 08-11 13:37
•1次下载
光耦的导通条件
光耦的导通条件主要包括以下几点: 一、输入电流达到阈值 光耦的导通条件之一是输入电流(通常是指发光二极管LED的电流If)需要达到一定的阈值。当输入电流小于该阈值时,光耦处于关断状态;当输入电流大于

天陆海导航完成近亿元A轮融资,获万台量级光纤惯导订单,领跑高精度光纤惯导系统国产化
导领域的领先优势,深化光纤陀螺及惯导核心光学器件布局,并推动高集成、高精度、高性价比光纤陀螺及光纤惯导系统的研发与量产。 同时,天陆海导航宣



评论