本文主要介绍的是51单片机PWM双舵机控制,具体的跟随小编来了解一下。
2018-04-18 14:18:39 27867
27867 PWM控制舵机角度(keilc本文主要关于参数配置:arr,psc,ccrx(setcompare函数参数)TIM相关配置简单提一嘴:(涉及到寄存器,但仅有库函数知识不妨碍实践)配置时最关键的两个
2021-12-09 06:55:19
控制舵机的PWM信号是单个的还是连续的?如果是连续的PWM信号的,在转过设定的角度后,PWM不输出的情况下,那么舵机是会怎么工作啊?单个PWM信号的话,舵机是不是就会保持当前的位置啊?
2016-01-08 10:30:41
舵机只有在接通或断掉pwm信号时才动180度,怎么办呢?
2023-10-19 07:52:38
写在前面:笔者是一名小白,如有错误,还请及时指正。1、舵机基本知识1、SG90舵机是一个模拟舵机,而非数字舵机,这两者的区别是这样,数字舵机只要给一个PWM信号即可,这个信号是目的地的位置,舵机
2021-08-17 08:35:31
舵机1. 警告!请外接电源,不要用电脑供电给舵机,烧了自理。2. 使用方法舵机需要使用 PWM 输出不同占空比来控制其旋转角度, 首先需要准备舵机导入 PWM 模块,创建 PWM 对象,PWM 输出
2022-01-05 07:53:44
舵机的控制信号可以用定时器产生吗,pwm不够用,需要8路pwm,能用一个定时器加8个io的方式模拟8个pwm吗
2023-10-28 06:54:36
stm32F103C8T6为例,从分析舵机的原理出发,到介绍使用stm的TIM功能输出PWM波,掌握理论后进行实战,先控制一个舵机上手,然后控制多个舵机。一、舵机的原理如图所示,一个舵机由变速齿轮箱,...
2022-02-21 07:11:54
就是一个闭环系统,输入相应的信号,就能控制舵机输出对应的位置量;伺服控制通过向舵机的信号信号线发送PWM信号来控制舵机的输出量;上一篇文章有介绍过PWM,一般来说,PWM的周期以及占空比,我们是可控
2020-12-10 17:02:12
的角度。一般采用单片机来产生PWM信号来控制舵机,PWM波的周期为20ms,通过改变其占空比来改变其转动方向,具体如下图所示。我是采用PA8端口的PWM波来控制舵机的,PWM波初始化代码如下:...
2022-02-24 06:30:57
舵机的工作原理是什么?舵机的结构是怎样构成的?PWM信号是如何控制舵机的?
2021-07-13 07:19:12
由于中使用了定时器,严重影响了其他引脚的信号变化。所以自行写了个简单的不驱动程序。舵机驱动原理如下:舵机的控制信号为周期是 20ms 的(PWM)信号,其中高电平时间从 0.5ms-2.5ms,相对
2022-01-20 08:06:24
舵机驱动时,PWM信号可以用3.3V直接驱动吗
2023-09-20 07:04:53
SG90舵机控制秘籍:参数、电源与信号的三大要点SG90舵机的正确控制主要围绕三个核心要素:PWM信号的周期与占空比、电源供电以及机械限制。一、 脉冲宽度调制(PWM)信号参数SG90舵机不是通过
2025-12-13 20:38:41
一 舵机概述1、舵机是什么?舵机是一种简单的伺服电机。当我们向舵机发送PWM信号时,输出轴旋转特定的位置。只要信号持续不变,舵机就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应
2021-06-30 06:35:27
STM32 F767 控制舵机前两天用阿波罗f7的开发板做了一下舵机控制,写个笔记做个记录以便以后复习,有错误的地方希望大家批评指正。舵机介绍PWM信号产生原理STM32 F7 PWM产生F767
2021-06-30 07:12:13
STM32控制舵机文章目录STM32控制舵机前言一、PWMPWM是什么?如何实现PWM信号输出?二、舵机什么是舵机?控制原理参考代码前言我们这里拿STM32F103C8T6作为我们的芯片,通过PB9
2021-08-04 06:26:51
STM32的引脚输出PWM信号,PWM信号可以通过定时器,delay延时函数等方式产生。其次,舵机的PWM控制信号是有一定的规律的。例如下图的SG90的180°舵机的0°和180°控制信号。图中所示,当STM32引脚输入0.5ms的高电平和19.5ms的低电平时,舵机就可以转到0°位置...
2022-02-21 07:21:36
述)]舵机需要信号的周期为20ms,即频率为50Hz。接下来正式操作:步骤一:STM32F4程序(本次程序的PWM信号产生的周期频率由定时器TIM14通道1产生(TIM14_CH1),想要使用其它定时器也
2021-08-19 08:33:18
舵机简介舵机是指在自动驾驶仪中操纵飞机舵面(操纵面)转动的一种执行部件。分有:①电动舵机,由电动机、传动部件和离合器组成。接受自动驾驶仪的指令信号而工作,当人工驾驶飞机时,由于离合器保持脱开而传动
2021-06-30 07:38:05
摘自:STM32 PWM控制舵机作者:三速何时sub20发布时间: 2021-02-27 14:54:01网址:https://blog.csdn.net/weixin_44234294/article/details/114173000 目录 舵机简介舵机工作原理.
2021-06-30 07:02:52
控制其旋转到不同的角度。舵机接收的是PWM信号,当信号进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。简单来说就是给舵机一个特定的PWM
2021-06-30 08:02:51
PWM是什么?如何实现PWM信号输出?什么是舵机?STM32是如何控制舵机的?
2021-10-19 06:19:36
新买了个舵机是5V电压信号驱动的,但是STM32F103C8T6的定时器3的IO口配置复用推挽输出的PWM波信号只有3.3V,加上拉电阻也只有3.8V左右,怎么才能驱动舵机呢?只有增加外部电路才可以吗?
2016-10-11 15:40:05
MG996R舵机,按键控制。相关知识:TIM定时器基本原理,TIM输出PWM信号、MG996R舵机驱动原理二、MG996R舵机简介MG996R舵机单线驱动,是一款360°舵机,180°舵机与360°舵机的区别
2021-08-18 06:00:32
舵机是一种靠占空比来控制摆动位置伺服电机,因此以PWM来控制它是恰如其份的选择。它之所以可以由占空比来控制摆动位置是与它的结构密不可分的。当信号进入内部电路后会产生一个偏置电压来触发电机,并由减速
2025-09-04 11:34:49
话接上贴,上贴说完了如何改变stm32f0的运行主频,以及各外设的主频。这回我们来说说我们项目的第一个应用子例:输出PWM控制舵机。PWM这东西不但可以用来输出脉宽信号控制舵机转向,像stm32f0
2016-06-01 15:54:10
(角度)伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统,由下壳、控制电路、电机、中壳、齿轮组、轴承以及上壳组成。舵机是一个闭环控制系统。控制电路板接收来自信号线的控制信号,控制电机转动,电机
2023-12-12 09:47:04
什么是舵机?舵机的基本结构是怎样构成的?如何通过PWM信号去控制舵机?市面上有几款比较常用的舵机?
2021-07-13 08:24:40
PWM是什么?PWM如何通过电压或者电流的调节来实现转速控制?在舵机控制上,pwm的作用是怎么体现的呢?
2021-08-23 07:13:56
不同的信号,来控制其旋转到不同的角度。舵机接收的是PWM信号,当信号进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。简单来说就是给舵机一个特定
2021-06-30 07:11:51
【K210+micropython】PWM信号控制舵机文章目录【K210+micropython】PWM信号控制舵机相关知识准备一、舵机二、PWM控制三、关键代码三、代码整合1.Servo库遇到
2022-01-14 09:19:54
如何实现Atmega2560舵机PWM控制?
2022-01-24 06:06:10
舵机的特点有哪些?如何用PWM波去控制舵机呢?
2022-03-01 06:16:32
谁能给个大致的程序,我看了下16F877是用***输出PWM信号的,可是不太清楚如何用来控制360度舵机,有没有大神给段程序参考?24EP系列的也行~~~
2017-05-24 21:06:34
如何采用PWM控制的方式来进行舵机的操纵?
2021-09-29 06:29:31
谁有pwm信号控制舵机的脉冲控制图
2023-10-24 06:16:44
我都跟着做了的。以下为我所有的问题。问题1:编写Pwm控制舵机程序,舵机无反应,但是led有闪烁根据资料http://wiki.ai-thinker.com/esp32从官网下载固件git
2022-02-16 06:16:55
急救!现打算用西门子LOGO控制舵机,Q输出接舵机PWM给定信号线,舵机负极线接M,这样可以控制舵机吗?
2015-07-16 22:31:18
点位信号(x,y),同时控制4个舵机运动(4个舵机转角不同)。谁能给个建议,C程序。这是我想的程序编写思路:(1)、ADS7843给P1.4信号(具体我还暂时没弄懂,假设给的是(X,Y))(2
2016-04-05 19:22:43
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置一般舵机的控制要求如图1所示程序如下:#include#define uint unsigned int#define uchar
2013-08-16 09:56:58
本文设计实现了基于国产CPU的舵机控制系统。提出了一种利用芯片的定时器资源和中断系统实现多路PWM信号的接收、复制、生成与输出并成功控制舵机的方法,该方法具有实现简单
2010-07-26 18:08:28 18
18 舵机控制方法
2011-10-09 16:26:0358 利用简单的51单片机的PWM的脉冲控制信号来很方便的控制机舵机
2015-11-10 15:25:36104 舵机控制可以用于智能小车、坦克等运动控制,包括PWM调制
2016-01-15 14:28:260 用单片机产生7路舵机控制PWM波的方法。
2016-03-21 15:33:1225 更好的了解PWM波是如何产生对舵机实现控制的
2016-12-17 11:16:5128 16路模块+PWM舵机驱动板+控制器+机器人+IIC接口+
2017-10-09 11:20:24128 本文首先介绍了舵机概述与工作原理,其次介绍了舵机的PWM信号,最后详细阐述了单片机控制舵机方法及程序分享。
2018-05-11 11:06:5561101 
本文首先介绍了mg995舵机参数与尺寸,其次介绍了mg995舵机使用范围及接线说明,最后阐述了mg995舵机控制原理及LM811的PWM控制MG995舵机程序。
2018-05-11 11:26:27147108 
本文首先介绍了舵机的用途和舵机信号线的作用,其次介绍了舵机的工作原理和工作电压和电流,最后介绍了舵机的规格和选型。
2018-05-11 11:41:5659567 本文首先介绍了舵机的工作原理,其次介绍了舵机的控制方法,最后阐述了舵机的速度控制。
2018-05-11 15:51:1243424 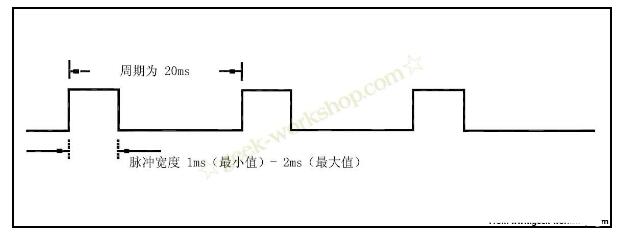
本文首先介绍了舵机工作原理,其次阐述了舵机控制原理及舵机的追随特性,最后介绍了舵机的控制方法和舵机对速度的控制。
2018-05-30 11:13:00147302 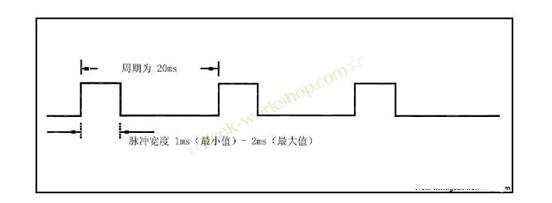
、脉宽调制(PWM)信号发生模块、PWM信号脉宽计数模块以及多路开关模块组成。软件部分主要是串口通信软件。其中,PWM信号发生模块可通过串口通信灵活地设置每路PWM信号的占空比。仿真和实验结果表明。该控制器可根据串口通信数据,可靠地对每个伺服舵机进
2018-11-16 16:48:035 PWM信号的定义 PWM 信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新的舵机协议,这些舵机只能应用于机器人行业,已经不能够应用于传统的模型上面了。
2019-01-02 17:25:3261051 为什么要写这篇博客、因为我在调我的51单片机wifi小车的双舵机摄像头的时候。从一开始对PWM很陌生到完全理解 PWM调节并调好了两个舵机加起来花费了整整一天的时间。也看了很多的资料。这里综合一下,希望能帮助到像我一样需要使用PWM调舵机的人。
2019-08-27 17:29:0014 PWM 信号为脉宽调制信号,其特点在于他的上升沿与下降沿之间的时间宽度。具体的时间宽窄协议参考下列讲述。我们目前使用的舵机主要依赖于模型行业的标准协议,随着机器人行业的渐渐独立,有些厂商已经推出全新
2019-11-26 08:00:0012 PWM波控制两路舵机的程序和工程文件免费下载。
2020-06-05 08:00:0011 本文档的主要内容详细介绍的是使用STM32单片机实现16路PWM舵机驱动的程序和工程文件免费下载。
2020-11-11 08:00:0027 目录 什么是舵机? 伺服控制 硬件连接 舵机规格 SG90 MG90S MG996R 总结 什么是舵机? 舵机是伺服电机的一种,伺服电机就是带有反馈环节的电机,我们可以通过伺服电机进行精确的位置
2020-12-22 17:29:1323390 一、关于舵机: 舵机(英文叫Servo):它由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。通过发送信号,指定输出轴旋转角度。舵机一般而言都有最大旋转角度(比如180度。)与普通
2021-06-18 16:29:0515765 三条引线,分别是电源线Vcc、地线GND和控制信号线舵机的控制信号也是PWN信号,利用占空比的变化改变舵机的位置,其脉冲宽度在0-2.5ms变化时,舵机输出的轴转角在0-180°变化三.用单片机实现舵机的转角控制目标 1. 产生基本的PWM周期信号,即产生20ms的周期信号2. 调整脉宽,即单片机
2021-11-10 19:20:5819 波形控制舵机角度。(2)PWM周期必须是50ms。(3)PWM高电平时间在0.5ms到2.5ms之间,分别对应0到180度。对应关系如下图。(4)不同型号的舵机这个高电平时间段有区别,可以看一下各自舵机的用户手册。...
2021-11-10 20:20:5914 项目描述:通过按键控制MCU输出不同占空比的PWM信号来控制舵机旋转不同角度;同时在LCD1602实时显示当前舵机的角度。仿真原理图如下:C语言代码如下
2021-11-11 14:06:0213 MG996R舵机,按键控制。相关知识:TIM定时器基本原理,TIM输出PWM信号、MG996R舵机驱动原理二、MG996R舵机简介MG996R舵机单线驱动,是一款360°舵机,180°舵机与360°舵机的区别
2021-11-23 18:21:4762 PWM控制舵机角度(keilc本文主要关于参数配置:arr,psc,ccrx(setcompare函数参数)TIM相关配置简单提一嘴:(涉及到寄存器,但仅有库函数知识不妨碍实践)配置时最关键的两个
2021-11-26 12:06:0510 更具体来说它是一个闭环控制系统(伺服系统)。舵机包括一个小型直流电机,加上传感器、控制芯片、减速齿轮组,装进一体化外壳,能够通过输入信号(一般是PWM信号,也有的是数字信号)控制旋转角度。标准的舵机有3根导线:电源线,地线,控制线。数字舵机工作原理数字舵机内部
2021-11-30 12:06:0615 数字舵机主要由马达、减速齿轮、控制电路等组成,只需要发送一次PWM信号就能保持在规定的某个位置。而模拟舵机是相同于传统的舵机,是需要多次发送PWM信号才能够保持在规定的位置上,实现对舵机的控制,按照
2021-11-30 14:21:1543 舵机控制那些事(附STM32代码!!!)
2021-12-08 18:51:0749 STM32控制舵机文章目录STM32控制舵机前言一、PWMPWM是什么?如何实现PWM信号输出?二、舵机什么是舵机?控制原理参考代码前言我们这里拿STM32F103C8T6作为我们的芯片,通过PB9
2021-12-24 19:26:1524 时就需要STM32的引脚输出PWM信号,PWM信号可以通过定时器,delay延时函数等方式产生。其次,舵机的PWM控制信号是有一定的规律的。例如下图的SG90的180°舵机的0°和180°控制信号。图中所示,当STM32引脚输入0.5ms的高电平和19.5ms的低电平时,舵机就可以转到0°位置...
2021-12-24 19:30:50127 的角度。一般采用单片机来产生PWM信号来控制舵机,PWM波的周期为20ms,通过改变其占空比来改变其转动方向,具体如下图所示。我是采用PA8端口的PWM波来控制舵机的,PWM波初始化代码如下:...
2021-12-31 19:48:5512 【K210+micropython】PWM信号控制舵机文章目录【K210+micropython】PWM信号控制舵机相关知识准备一、舵机二、PWM控制三、关键代码三、代码整合1.Servo库遇到
2022-01-14 12:28:0912 pwm控制SG90舵机资料分享
2022-07-10 09:22:0945 大部分人都是在关注功能本身,只有我看上了这个改装的小舵机。因为市面上的舵机只能接收PWM信号,进行角度控制。
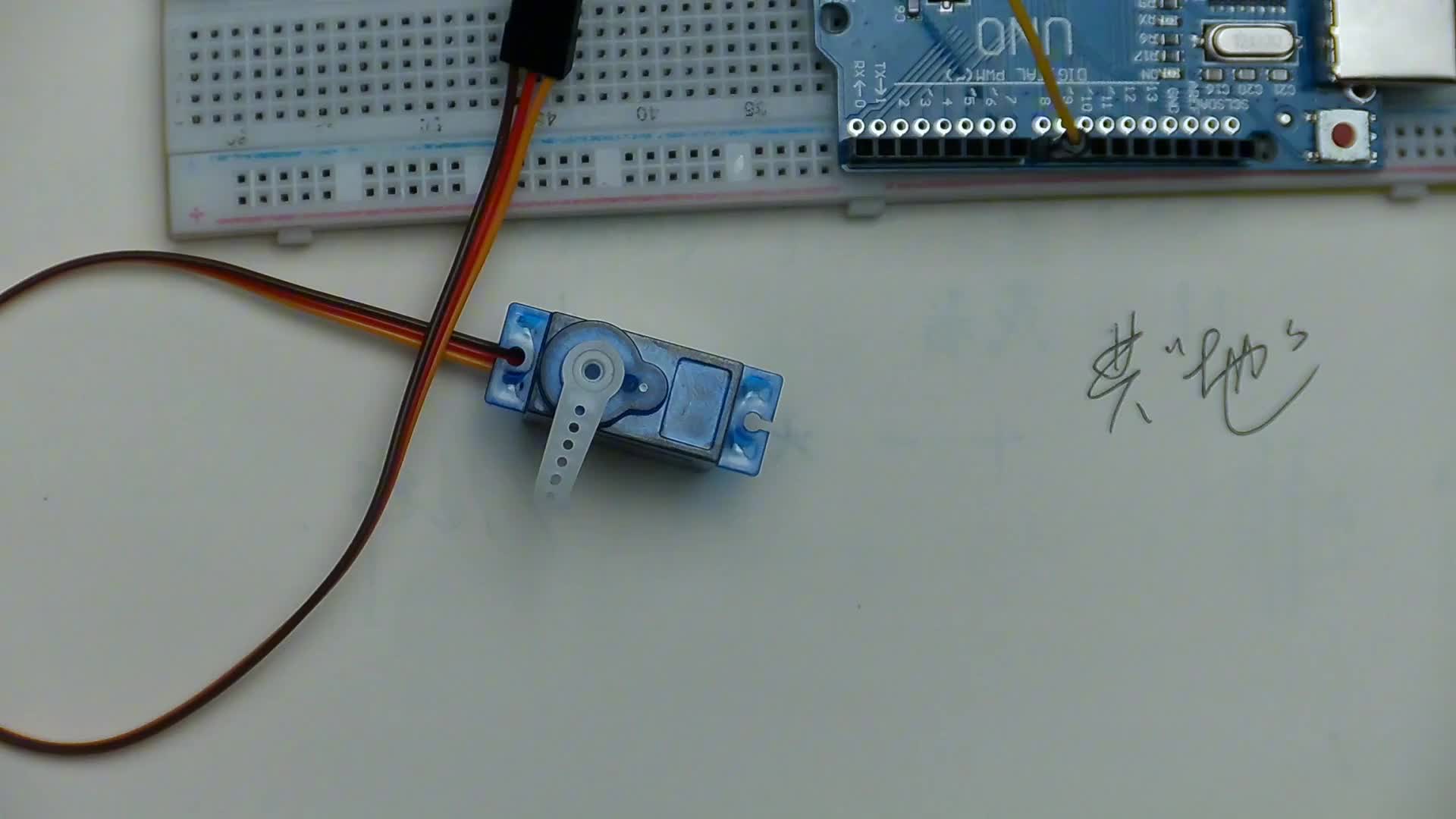
2022-08-04 11:57:153607 本文主要介绍通过Arduino控制舵机,步进电机以及循环的使用。对于Arduino控制舵机的方法是通过其输出PWM信号来实现控制的。这里所谓的PWM信号其本质上就是脉冲信号。而对于步进 电机的控制
2023-03-23 13:52:561 现在常用的舵机控制信号主要有 PWM 信号和串口总线信号两种:其中 PWM 信号控制比较简单,但是功能只有一个即控制舵机转动;串口总线信号控制则比较复杂,需要控制器有串口输出功能,但是能实现较多
2023-10-16 15:51:232157 
伺服电机通常被称为舵机,它是一种带有输出轴的小装置。当我们向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应发生变化。日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等领域。
2023-10-24 15:36:444004 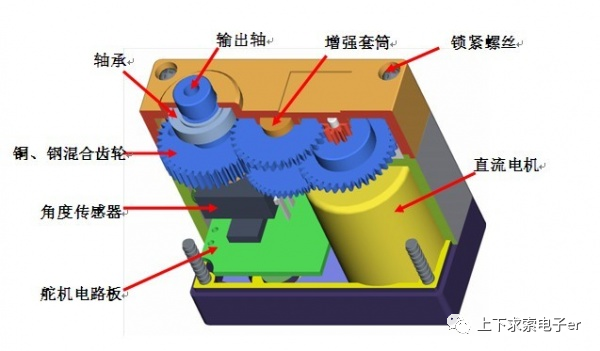
PWM信号控制舵机原理
2023-09-21 09:32:3712 舵机 舵机是一种位置(角度)伺服的驱动器,我们可以通过给信号脚不同的占空比来让舵机进行打角进而控制小车方向。 例如C车的S3010舵机,它需要使用周期20ms(50Hz)的PWM驱动,高电平
2023-11-14 16:54:311855 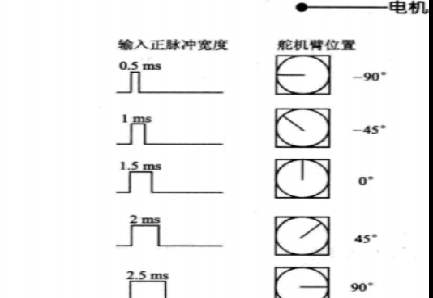
一、PWM 舵机控制原理 PWM 舵机的核心是 脉冲宽度与旋转角度的对应关系 : 舵机接收周期性的 PWM 信号(通常周期为 20ms,即频率 50Hz),信号由高电平(有效电平)和低电平组成
2025-08-12 18:37:261774 舵机是一种高精度的角度控制执行器,广泛应用于机器人、遥控模型、自动化设备等场景。其控制核心是通过 PWM(脉冲宽度调制)信号 调节角度,配合内部闭环反馈实现精准定位。以下从原理、控制方式、关键参数
2025-08-15 10:23:511785 一、舵机控制的核心原理 舵机内部集成了 直流电机、减速齿轮组、电位器(角度传感器)和控制电路 ,形成闭环控制系统: 信号接收 :外部输入 PWM 信号,控制电路解析信号中的脉冲宽度,确定目标角度
2025-08-15 10:25:501356 舵机 PWM 信号介绍 PWM(Pulse Width Modulation,脉冲宽度调制)信号是舵机的核心控制方式,其通过脉冲的宽度变化来精确指令舵机输出轴的旋转角度。以下从信号特性、参数标准
2025-08-22 10:59:341699 什么是舵机?舵机的种类有哪些? 舵机(Servo Motor)是一种 集成电机、减速器、位置传感器与闭环控制系统的高精度执行元件 ,核心功能是根据输入信号(多为 PWM 信号)精准控制输出轴的旋转
2025-08-26 11:08:455887 ,输出旋转运动。通常转动角度范围有限(常见 0°-180°,部分可达 360° 连续旋转),例如 1.5ms 的 PWM 脉冲信号对应 90° 中位位置,电机带动输出轴转动到指定角度后保持静止,即使受外力也能通过闭环反馈维持位置。 直线舵机 :本质是
2025-09-28 18:25:56620 PWM(脉冲宽度调制)信号控制舵机的核心原理是通过固定周期内高电平的持续时间(脉宽)对应舵机的旋转角度,舵机内部电路根据检测到的脉宽驱动电机转动到目标位置并保持。以下是具体实现过程: 一、核心控制
2025-09-29 10:48:51846
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论