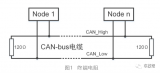
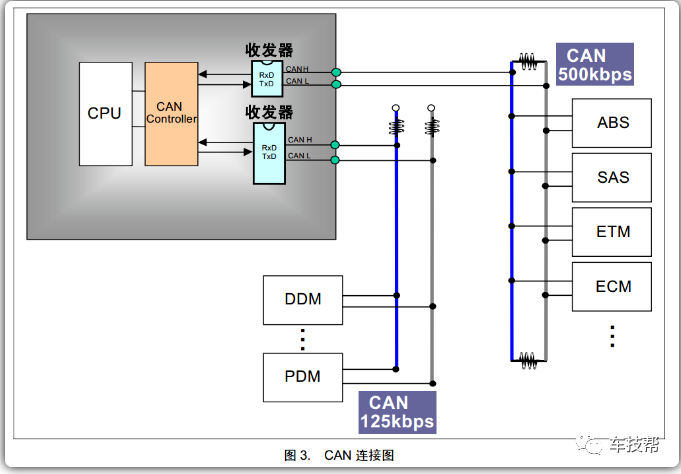
众所周知,CAN总线的传输方式是差分传输方式,而总线电平的判断,就是CAN收发器根据CANH和CAN....
汽车中控屏幕测试(广播、视频、音乐、喜马拉雅、地图导航、餐厅、天气、新闻、carplay/carli....
自动驾驶运用了多种传感器(超声波雷达、毫米波雷达、智能摄像头、高清/标清摄像头、激光雷达等),各类不....

电动汽车各个模块之间的交互有效性直接影响了汽车的行驶效率和驾驶感。而插电式混合动力汽车根据电力驱动系....
激光雷达是一种通过探测远距离目标的散射光特性来获取目标相关信息的光学遥感技术。随着超短脉冲激光技术、....

在自动驾驶体系中,毫米波雷达是系统感知层不可或缺的重要硬件,能让智能驾驶感知系统立体化。因为汽车自动....
OBD 通俗来讲就是车载诊断系统,主要使用OBD诊断仪读取车辆数据,查看是否存在故障代码。在尾气排放....
而联发科在手机市场的技术优势和强大用户口碑相信也是诸多数码科技爱好者们耳熟能详的故事。其发布于201....
近几年,自动驾驶始终是一个热门话题,自动驾驶层级的不断提升对传感器的要求有着新的变化,比如在数量上....

我们知道CANFD比CAN拥有更长的数据长度(最长64字节),更高的波特率(8Mbps甚至更高)。

在汽车产业向智能化转型的过程中,汽车的开发模式、消费者对车的认知,以及汽车销售的商业模式都在发生着颠....

近年来,随着汽车技术的发展,汽车电子产品数量逐年增加,复杂性日益提高,车内IC增长率已超越所有其他的....

控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通....
激光雷达在抗干扰能力方面,与微波毫米波雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光....

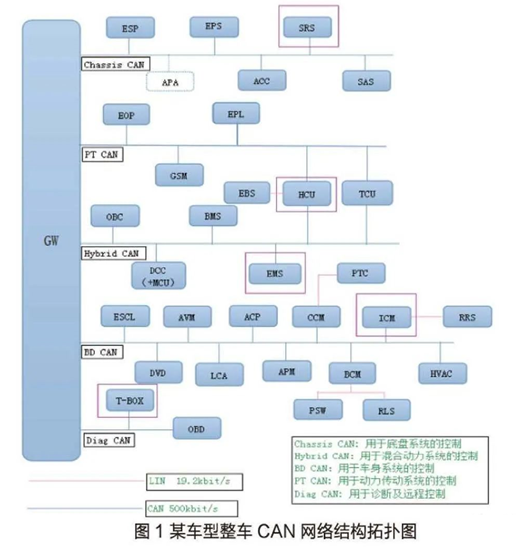
庞大的 ECU 数量同样意味着复杂、冗长的总线线束。据电子工程世界网数据,一辆高级汽车的线束使用量约....
车外离线诊断系统,其通过向车内在线诊断系统发送服务请求,读取相应的故障码信息以及清除故障码,并完成诊....

泊车雷达系统的智能技术不能超越物理定律规定的极限,只能在系统极限范围内工作。切勿因为泊车雷达系统提高....
相机获取一帧图像分为曝光和读出两个阶段。相机使用的传感器不同,相机的曝光时间和读出时间的重叠关系也有....

近年来,顾客对汽车的安全性、舒适性、娱乐性要求越来越高,所以汽车上增加的功能也就越来越多,而且大部分....

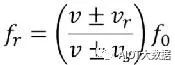
毫米波雷达是使用天线发射毫米波(波长1-10mm),通过处理回波测得汽车与探测目标的相对距离、速度、....
CAN总线终端电阻,顾名思义就是加在总线末端的电阻。此电阻虽小,但在CAN总线通信中却有十分重要的作....
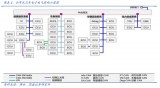
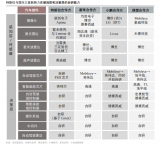
特斯拉及蔚小理选择自研电子电气架构,目前特斯拉已研发出域集中式E/E架构并引领行业变革。四家车企在选....
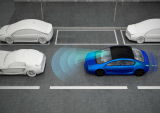
先进驾驶辅助系统(Advanced Driver Assistant System),简称AD....
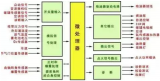
新能源汽车电控系统,狭义的讲是指整车控制器,广义上讲,则包括整车控制器、电池管理系统和驱动电机控制器....

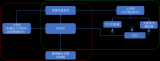
同时可以将Requirement和Customer Feature进行映射关联,从而实现追溯,另外C....

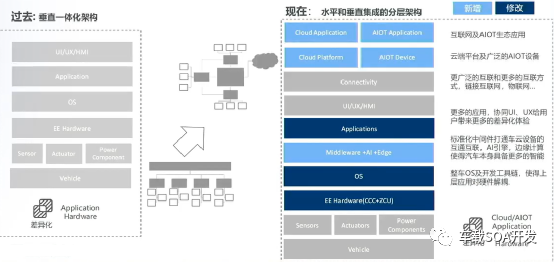
【摘 要】 在软件定义汽车时代背景下,新一代的汽车电子电气架构(以下简称E/E 架构) 不断进化。物....
“单车智能+车路协同”已被视为未来自动驾驶和智慧交通发展的重要技术路径,进行融合协同控制功能仿真验证....
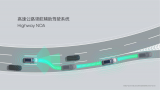
功能的本质意思是把“导航”和“辅助驾驶”结合。在原来L2辅助驾驶的基础上(如车道线保持、自动跟车),....
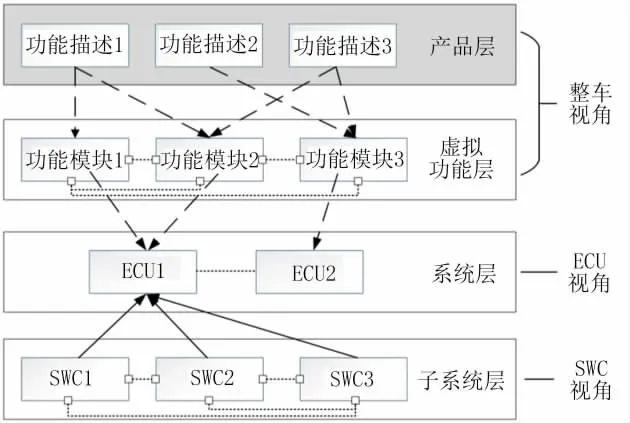
在传统的整车电子电气架构体系中,通常将功能划分在不同的模块领域,如动力总成、信息娱乐、底盘、车身等,....

今天的电子电气架构相对于以往发生了重要变化,首先相对于以往分布式架构中众多计算资源有限的ECU而言,....