 4D毫米波雷达有何不凡之处
4D毫米波雷达有何不凡之处

毫米波雷达是使用天线发射毫米波(波长1-10mm),通过处理回波测得汽车与探测目标的相对距离、速度、角度及运动方向等信息的传感器。 其全天候全天时、精确度较高、体积小、性价比高,在环境监测传感器中毫米波雷达是除车载摄像头外另一主流方案。
在应用场景变得更严苛之后,毫米波雷达正朝着能更准确描述车辆前后方场景的4D毫米波雷达前进。
4D指的是在原有的距离、方位、速度三个维度基础上增加了高度信息。 相比传统毫米波雷达仅能判断出前方有障碍物,4D毫米波雷达增加了纵向天线及处理器,可以接收更多信息返回点,并像激光雷达一样呈点云图,能呈现出更多细节信息,探测出障碍物的形状,弥补了传统雷达难以识别静态障碍物的短板。
相比摄像头而言,4D毫米波雷达有更多的天线数,更高的角度分辨率、速度分辨率和距离分辨率,可以在没有激光雷达参与的情况下更有效地解析目标的轮廓、类别、行为。
特斯拉增配4D毫米波雷达,能够增加获取障碍物距离信息,以弥补摄像头缺陷。 值得注意的是,4D毫米波雷达的点云数量大幅增加,其算法比传统毫米波雷达更为复杂,目前大部分车企并不具备这种算法能力。 有毫米波雷达厂商项目经理曾表示:“在2022年~2023年量产的项目,用的基本都是毫米波雷达做完数据处理之后的结果,大部分车厂还没有能力将毫米波雷达的点云真正用起来。 ”
此外业内有观点认为,对于特斯拉的传感器配置和其他车厂要分开来看,特斯拉核心依赖视觉感知+算法,由于视觉方案对于一些corner case问题无法解决,因此需要增加一颗可以测距的4D毫米波雷达; 对于其他车企而言,本身自动驾驶的基础就是视觉算法+强感知,比较依赖于激光雷达的高精建模能力,再新增配置一颗4D毫米波雷达并无必要性。
目前,4D毫米波雷达市场的主要玩家包括大陆、采埃孚、博世、安波福等传统Tier1厂商,Waymo、Mobileye、华为等自动驾驶方案公司,傲酷、Arbe、几何伙伴、楚航科技、森思泰克等初创公司。
4D毫米波雷达与激光雷达相比,受制于激光的物理特性,激光雷达在雨雪、沙尘等极端天气环境下,工作可靠性会受到影响。 4D毫米波雷达能全天候全天时工作,在暴雨、大雪、漆黑及空气污染等恶劣环境条件下也能提供高可靠性的探测。 此外,4D雷达能够“看穿”墙壁、紧闭的门和其他固体物体,这是激光雷达所不具备的能力。
特斯拉 HW4.0 硬件曝光
具体体现在:(1)FSD芯片性能小幅提升; (2)显存从LPDDR4大幅升级为GDDR6; (3)摄像头接口数量提升33%,同时摄像头分辨率提高; (4)新增以太网接口,为4D激光雷达上车准备。
计算芯片方面:FSD 芯片性能提升,HW4.0 的2 颗 FSD芯片仍然沿用了上一代FSD 的ARM Cortex-A72 CPU内核,但数量从3.0的12个提升到4.0的20个,最大频率2.35GHz,默认频率1.37Ghz,TRIP内核数量从2个增加到3个,工作频率提高到2.2GHz.CPU和GPU保持不变,CPU依旧采用AMD Ryzen Zen+ V180F嵌入式处理器,GPU采用基于AMD Radeon Navi 23 打造的 RDNA2。 工艺制程极有可能采用 7nm 先进制程,整体提升了算力并降低功耗。
存储芯片方面,显存规格和容量跨越式升级。 以往因算力需求不高以及GDDR功耗过高等因素,导致车厂普遍使用LPDDR系列芯片,特斯拉开创了在车载领域使用GDDR的先河。 GDDR6最高运行频率可达1750MHz,最高传输速率约是12800MT/s,是HW3.0中所使用的LPDDR4的三倍。 根据目前曝光的HW4.0拆解图,HW4.0共使用16颗GDDR6芯片,总计容量为32GB,预估价值量约200-250美元。 而HW3.0则是使用8颗LPDDR4芯片,总计容量为16GB,价值量约201美元,成长约十倍。
传感器方面:HW4.0的智能驾驶模块上有12个摄像头接口(1个预留),相较HW3.0的9个摄像头接口数量提升33%.据业内人士推测,4.0 硬件或在 3.0 基础上将前挡风玻璃的三目摄像头变成双目摄像头,但前视摄像头由 120 万像素提升至500万像素,同时新增2个侧摄像头和1个前摄像头, 意味着HW4.0逐渐转向TeslaVision纯视觉路线,360度环视也有望实现。
接口方面:HW4.0 将以太网接口从 1 个升级到 2 个。 新增加的以太网接口正是为定制的高分辨率毫米波雷达服务,代号Phoenix(或是4D毫米波雷达),传统毫米波雷达用CAN或CAN-FD连接,4D毫米波雷达信息量大,需要使用10OMbps以太网。
国内市场方面,4D毫米波雷达已搭载于飞凡R7、深蓝SL03等量产车型,产品有望加速渗透。 目前,威孚高科、经纬恒润正与4D毫米波雷达芯片供应商Arbe紧密合作,进行产品研发,华域汽车的4D毫米波雷达已实现小批量供货,保隆科技的相关产品也已处于研发测试阶段。
从毫米波雷达到4D毫米波雷达
4D毫米波雷达的诞生还要从古老的多普勒效应说起。
1842年,奥地利物理学家多普勒发现了多普勒效应。 所谓多普勒效应,是指波源和观察者有相对运动时,观察者接收到的频率和波源发出的频率并不相同,两者之间的差值叫做多普勒频率。
多普勒效用公式表达如下。 式中,fr为观察者观测到的频率,f0为波源发出的频率,v为波的传播速度,vr为观察者的速度,vs为波源的速度。 当观察者或波源有向对方靠近的运动时,对应分子分母取减号,反之取加号。
如果我们在波源的位置放置一个探测器接收反射回来的波,通过检测多普勒频率,就可以测得观察者相对于光源的移动速度。 再根据波发出和接收的时间差,基于TOF原理,便可以计算出观察者相对于光源的距离。
多普勒效应,奠定了毫米波雷达这诞生的理论基础。
发展简史
毫米波雷达的雏形出现在20世纪四十年代的第二次世界大战中,英国通过部署对空雷达站,有效抵御了德国空军的一系列空袭行动。 二战中的一战成名,也让其在二战后迅速推广普及到各个领域。
毫米波雷达在汽车领域的应用可以追溯到1973年,德国AEG-Telefunken和BOSCH公司开始合作投资研究汽车防撞雷达技术,但由于技术和成本原因,一直未能大规模商业化落地。
20世纪80年代,欧洲在“欧洲高效安全交通系统计划”指导下重新开启了车载毫米波雷达的研制。 并在技术和成本均实现突破后,迎来了汽车防撞雷达的广泛应用。
里程碑事件是在1999年,奔驰在S级车上使用77GHz毫米波雷达实现了基本的自适应巡航功能,开启了辅助驾驶时代,也迎来毫米波雷达在汽车领域的蓬勃发展。
毫米波雷达刚刚出道的时候,受制于芯片工艺等原因,一个雷达中需要配备七八颗射频芯片才能保证基本的分辨率。 这导致当时的毫米波雷达体积巨大,成本巨高,只在高端车型偶有应用。 机械式激光雷达诞生的初期,各方面都像极了这位前辈。
进入到千禧年之后,伴随着锗硅半导体工艺的发展,毫米波雷达集成度大幅提高,成本大幅下探,在高端车型上的应用也迎来了一次小爆发。 这又像极了混合固态激光雷达当前的局面。
2017年,TI推出了基于CMOS工艺的毫米波雷达芯片,一口气将射频芯片、数字处理芯片和微控制器三个模块集成到一个SOC上,既显著降低毫米波雷达的成本,又大幅拉低了毫米波雷达的开发难度。 这又有点像我们期待的固态激光雷达的样子。
更惊为天人的是,TI随后将天线也集成在芯片里,推出了集成度更高的天线片上集成(AoP)芯片,直接将毫米波雷达价格拉到了百元级别,并提供了毫米波雷达开发傻瓜式工具链,国内由此掀起了轰轰烈烈的毫米波雷达创业及国产化浪潮。
一、使用频段
毫米波雷达,从名字也可以猜测出,这是一种工作在毫米波频段的雷达。 而毫米波是指波长在1-10mm,频率在30-200GHz的电磁波,其传播速度和光速近似相等。 这个频段电磁波在探测能力、穿透能力、抗干扰能力等方面实现了“中庸之道”,完美契合车载领域。 并助力毫米波雷达在车载传感器领域赢得了“全天时、全天候”工作的美誉。
毫米波雷达主要使用24GHz,60GHz,77GHz和79GHz四个频段。 24GHz准确来说属于厘米波,由于测量距离有限(60m左右),分辨率一般,常被设计为角雷达,探测大视场角范围的近距离障碍物。 60GHz由于受大气衰减影响特别大,常被设计为生命体征检测雷达,对车内生命体征及人员姿势进行检测。 77GHz和79GHz由于测量距离较远(200m左右),常被设计为主雷达,作为前向长距离感知的利器,这两个频段也是未来车载毫米波雷达领域的主流频段。
二、基本组成
毫米波雷达核心组成部分包括收发天线(TX&RX),射频单元(RF)、模数转换器 (ADC)、数字信号处理器 (DSP)、微控制器 (MCU)等。 上文提到过,毫米波雷达刚诞生那会,这些器件都是分立的,后来通过CMOS工艺将RF、ADC、DSP、MCU等直接整到一颗SOC中(不同厂家SOC集成模块数量略有差异)。
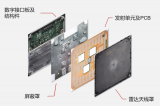
今天我们随便拆开一个普通毫米波雷达,除了索然无味的外壳、接插件和固定装置,尚能引起一点兴趣的就是那两块PCB板了(有的厂家集成到一块PCB板上),如下3D爆炸图所示。
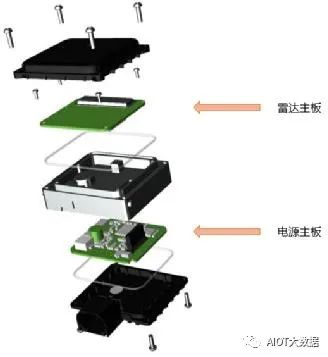
电源主板上面密密麻麻竖立着电感、电容、二极管、电源芯片等,主要负责系统电源管理。 各家一般还会在上面集成一颗安全控制器,提供与整车通讯及安全相关功能。
雷达主板可以说是整个毫米波雷达的核心,上面包括天线、RF、DSP和控制电路等。
(1)天线。 理论和实践证明,当天线的长度为电磁波波长的1/4时,天线的发射和接收转换效率最高。 而毫米波的波长只有几个毫米,所以天线可以做得很小。 通过使用多根天线来构成阵列天线,还能够实现窄波束的目的,而窄波束意味着更高的方位角分辨率。
目前毫米波雷达天线的主流方案是微带阵列,最常见的一种设计是在高频PCB上集成“微带贴片天线”,并将高频PCB集成在雷达主板上。 下图展示了一个雷达主板集成天线高频PCB板的实物,这是一个3发6收阵列天线。 此种方案极大降低了毫米波雷达的成本和体积。
(2)RF。 RF负责信号调制、发射、接收以及回波信号的解调,是毫米波雷达的核心射频部分。 目前主流的方案是通过MMIC(单片微波集成电路)技术将以上内容集成。
MMIC是一种用半导体工艺在半导体衬底上制造出无源和有源元器件的技术。
在毫米波雷达领域,基于锗硅工艺的MMIC集成的功能电路主要包括低噪声放大器、功率放大器、混频器、检波器、调制器、压控振荡器、移相器、开关等部件。 发射器、接收器和DSP均作为独立单元,这使得毫米波雷达设计过程复杂,整体体积也较为庞大。
随着COMS工艺的发展, MMIC一方面变得更小,另一方面也为其与DSP和MCU集成提供了工艺可行性。 TI在2016年底,推出基于CMOS工艺的高集成度77GHz毫米波雷达芯片AWR1642,将前端MMIC、DSP和MCU三个模块集成在一个SOC上。 显著降低毫米波雷达成本的同时,还极大拉低了开发难度。
(3)DSP。 DSP通过嵌入不同的信号处理算法,提取从前端采集得到的中频信号,获得特定类型的目标信息。 DSP是毫米波雷达稳定性、可靠性的核心。
(4)控制电路。 控制电路根据DSP输出的目标信息,结合车身动态信息进行数据融合,最终通过主处理器进行决策处理。
三、工作机制
根据辐射电磁波方式不同,毫米波雷达主要分为脉冲波工作体制和连续波工作体制两种类型。
脉冲波技术是指毫米波雷达在短时间内发射具有高峰值功率的短脉冲,基于多普勒频率和TOF原理实现物体速度和距离测量,基于并列接收天线收到同一目标反射的脉冲波的相位差实现角度测量。 由于功率高,因此可以在大杂波背景下,检测出远距离小幅度移动目标。 但是也带来了高成本、高体积、高功耗的缺点。 目前车载毫米波雷达领域很少有采此种方式。
连续波技术又可以分为FSK(频移键控,可测单个目标的距离和速度)、CW(恒频连续波,只用于测速不可用于测距)和FMCW(调频连续波)等方式。 其中FMCW由于具有同时检测多个目标、分辨率较高、成本较低等优点,因此成为连续波技术中的带头大哥,也顺利当选所有工作方式中的武林盟主。
FMCW是一种频率随时间线性增加的Chirp波形,其振幅相对于时间、频率相对于时间的波形如下图所示。 毫米波雷达内部合成器负责Chirp信号的生成,并以帧为单位,均匀等时间间隔的通过发射天线发出一串Chirp信号。
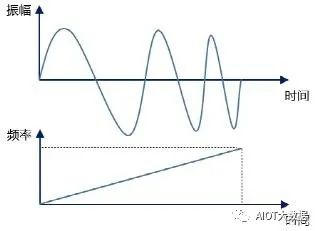
在毫米波雷达接收天线收到发射回来的电磁波后,会将回波信号与发射信号一同送入混频器内进行混频。 由于发射信号在遇到被测目标并返回的这段时间内,回波信号的频率相较发射信号已经发生了改变。 而混频器的目的就是计算出发射信号与回波信号之间频率差,称之为中频信号。 而这个中频信号就包含了被测目标的距离秘密,后续再经过滤波、放大、模数转换和测频等处理后就可以获得被测目标的距离信息。
对于速度测量,由于被测目标距离的不同,毫米波雷达接收到的回波信号相位也会不同。 通过对一帧中所有单个chirp信号进行等间隔采样,并将采样点的数据进行傅里叶变换,然后利用相位差来测量被测目标的速度。
对于角度测量,利用多个接收天线接收同一个回波信号,并计算回波信号之间的相位差来实现角度测量。
重生-3D变4D
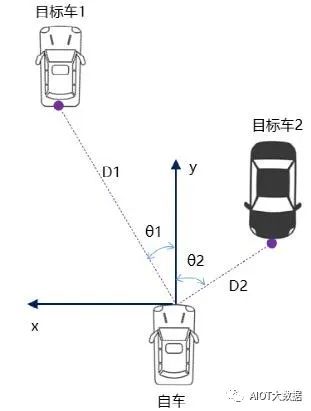
毫米波雷达只能输出距离、速度和角度信息,也被称为3D毫米波雷达。 而这个距离D和角度θ是安装雷达的自车在平面极坐标系下的数据,如下图所示。 通过将极坐标系转换为笛卡尔坐标系,我们可以获得目标车在x和y方向上离自车的距离。 这个时候,大家是不是发现少了一个维度z方向上的距离。 而这个也是3D毫米波雷达饱受诟病的缺点之一。
这个缺点对移动物体来说,还不算大问题,毕竟在道路上探测到的移动物体按常理推测应该都是在道路上正常运动的物体,这也是各厂商一贯的处理策略,从而规避了无法获得高度这一缺陷。 但是对于低空飞行的鸟,被飞吹起的轻质物体(树叶、塑料袋等),依旧存在误识别的问题,我想这个应该也是3D毫米波雷达处理移动物体时的Corner Case吧。
但是这个缺点对静止物体来说,就是致命的。 道路中间的井盖,减速带,悬在半空中的各种标识牌,限高架,静止的车辆等,由于没有高度信息,通过3D毫米波雷达完全无法决策这些障碍物是否影响通行。 针对静止物体,各家厂家简单粗暴,要么直接忽略,要么极大降低置信度。 这也是Tesla前期几起事故的原因之一:摄像头没有识别出倾倒的白色货车车厢,毫米波雷达识别到,但是结果在决策中置信度太低,导致车辆没有触发自动紧急自动功能。
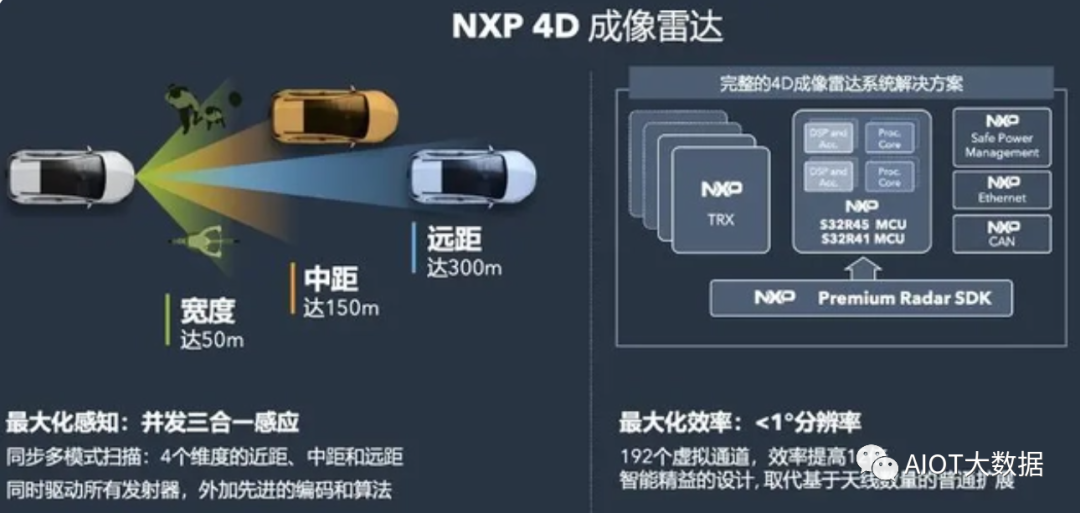
4D毫米波雷达增加的最显著特性就是可以精确探测俯仰角度,从而获取被测目标真实的高度数据,也就是目标物体在笛卡尔坐标系下z轴方向上的距离。 凭借这一特性,4D毫米波雷达可以“识别静止物体”了,最短的那块木板补上了。 除此之外,4D毫米波雷达在分辨率上也获得极大提高。 以Arbe Phoenix为例,其水平和垂直分辨率分别为1°和2°,水平分辨率比普通3D毫米波雷达提升5~10倍。
得益于俯仰角测量能力的获得,其在垂直方向上也有了分辨率一说,而Phoenix的2°垂直分辨率仅比普通16/32线机械式激光雷达的1°垂直分辨率小一倍。 这让4D毫米波雷达在扫描同一物体时可获扫描的点的数量极大增加,以至可以有低线束激光雷达的点云扫描效果。
(1)俯仰角测量
角度测量原理中,需要通过多个接收天线接收同一个回波信号来计算相位差从而实现方位角的测量。而受制于成本和体积的限制,当前毫米波雷达使用的是多是单片收发器。而要想实现俯仰角的测量,就必须增加虚拟通道的数量,最容易想到的方法就是将多个单片收发器级联,这也是目前大部分4D毫米波雷达产品采用的方法。毫米波雷达巨头大陆推出的4D毫米波雷达ARS540采用的就是4片级联的方案,将NXP的4片MMIC级联,实现12发16收,总计达192个虚拟通道。这比其经典的3D毫米波雷达ARS408的3发6收18个虚拟通道方案,虚拟通道总数上翻了10倍多。
此种将硬件进行直接堆叠的缺点也显而易见,成本、尺寸、功耗会同步大幅增加,工艺复杂度的提升和大量天线之间的干扰问题,再加上数据量大幅增加带来的处理芯片性能要求的提高,是厂商无法忽略的头痛难题。
与硬件堆叠相对应的是单纯依靠AI算法增加虚拟通道数,而部分芯片巨头已经开始自主研发多通道阵列射频芯片组、雷达处理器芯片和基于人工智能的后处理软件算法。集成化、芯片化、定制算法,这个闻起来有点技术革新的味道了,可能也是4D毫米波雷达该有的终极样子。
(2)分辨率提高
分辨率直接和虚拟通道的数量成正比。
4D毫米波雷达的特点
现阶段自动驾驶技术中,主要用到的传感器有摄像头、激光雷达和毫米波雷达。摄像头的光谱从可见光到红外光谱,是最接近人眼的传感器,有丰富的语义信息,在传感器中具有不可替代的作用,比如红绿灯识别、交通标识识别,都离不开摄像头的信息。激光雷达器件较为成熟,905nm波段广泛应用,能获得丰富的场景立体空间信息。从频谱可以看到,激光在频谱上和可见光较为接近,因此和可见光有着相似的粒子特性,容易受到恶劣天气的影响。而毫米波雷达波长为3.9mm附近,是这几种传感器中波长最长的传感器,全天候性能最好,且具备速度探测优势。
摄像头和激光雷达由于有较为丰富的信息,前期的自动驾驶感知研究主要集中这两类传感器,毫米波由于分辨率不足导致其在使用上存在局限性。近年来,各大毫米波厂商在4D毫米波雷达上加大投入,在超宽带和大天线阵列两个方向上取得了一些进展,这使得4D毫米波的研究成为了自动驾驶研究的热点之一。
4D毫米波雷达突破了传统雷达的局限性
随着毫米波芯片技术的发展,应用于车载的毫米波雷达系统得到了大规模应用,然而传统雷达系统面临着以下缺陷:
当有静止车辆,目标信息容易和地杂波等掺杂在一起,识别难度较大,而移动车辆可以靠多普勒识别。
当有横穿车辆和行人, 多普勒为零或很低,难以检测。
没有高度信息,高处物体如桥粱路牌和地面的车辆一样区分不开,容易造成误刹,影响安全性。
角度分辨率低,当两个距离很近的物体,其回波会被混在一起,很难知道有几个目标。
用雷达散射截面积区分物体难:可以通过不同物体的雷达散射截面积的不同和不同帧之间的反射点的不同来区分路牌、立交桥和车辆,然而准确率并不高。
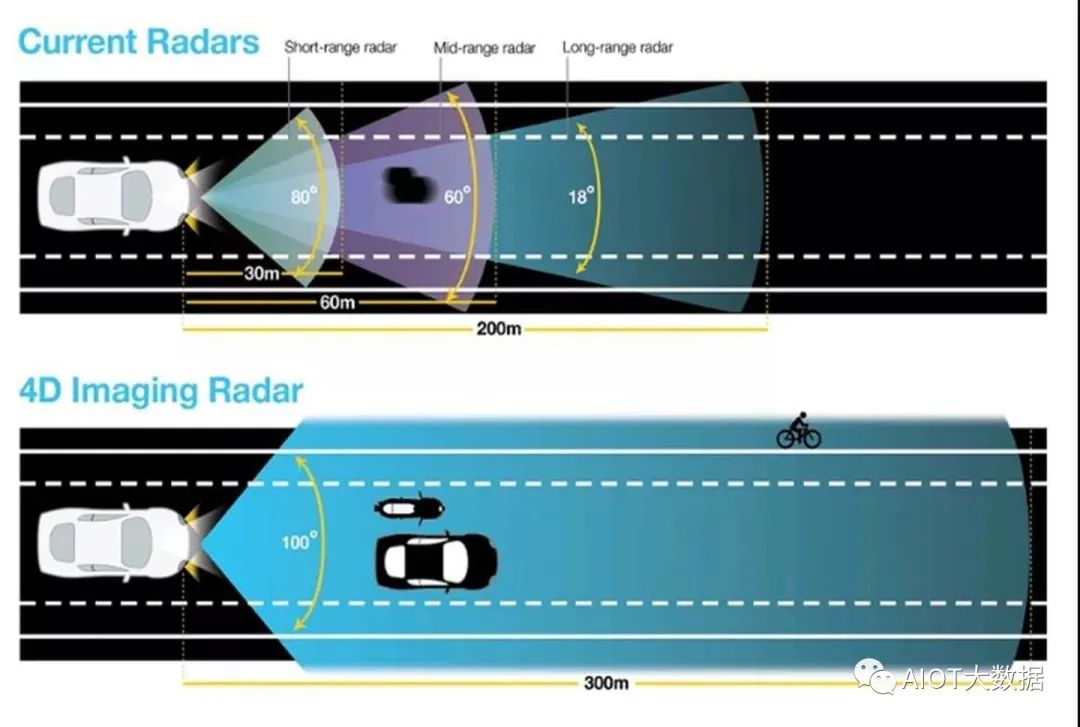
最远探测距离不超过200 m,探测距离范围有限。
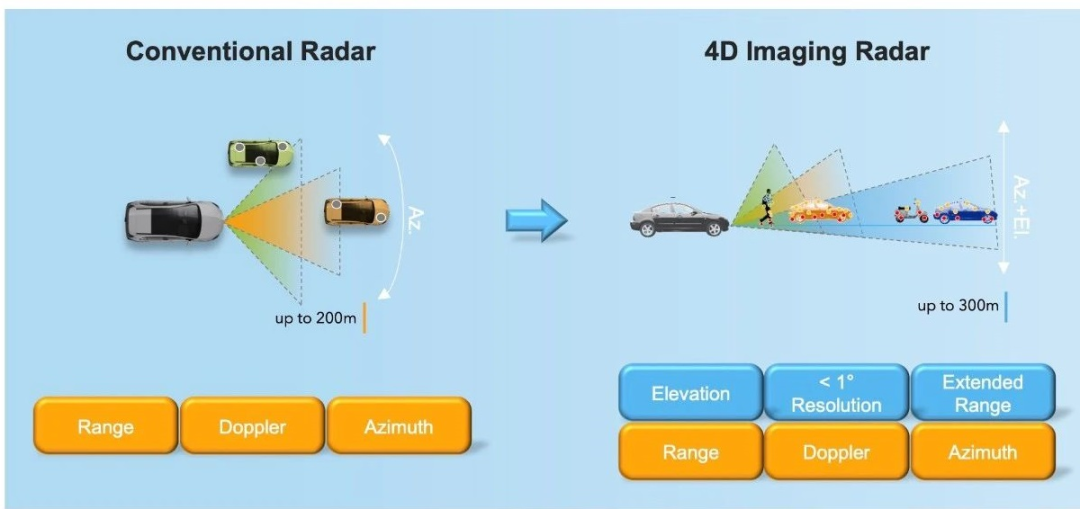
而4D毫米波雷达技术突破了传统车载雷达的局限性,可以以很高的分辨率同时探测目标的距离、速度、水平方位和俯仰方位,使得:
最远探测距离大幅可达300多米,比激光雷达和视觉传感器都要远
4D毫米波雷达系统水平角度分辨率较高,通常可以达到1 的角度分辨率,可以区分 300m 处的两辆近车
4D毫米波雷达系统可以测量俯仰角度,可达到优于2°的角度分辨率,可在 150m 处区分地物和立交桥。
当有横穿车辆和行人, 多普勒为零或很低时通过高精度的水平角和高精度的俯仰角可以有效识别目标。
目标点云更密集,信息更丰富,更适合与深度学习框架结合。
4D毫米波雷达的先驱者
为对4D成像雷达系统有更系统的认识,近年来市面上几种常见的成像雷达系统方案中,包括TI公司、Arbe公司、Uhnder公司。
TI级联方案---毫米波成像雷达系统的开辟者
在TI公司早期推出的毫米波雷达芯片AWR1243中通过发射FMCW信号来探测目标的距离和速度,而使用时分波形的方式将三个发射和四个接收构成的12个虚拟通道来探测角度,然而受限于角度分辨率,其获取的目标信息有效。而TI公司于19年推出了自己的毫米波雷达系统级联方案,通过将四个三发四收的单个MIMO芯片级联方案可以构成12发16收的MIMO雷达阵列,此时雷达系统的虚拟通道数可从12提升到了192,该方法可以极大的提升了雷达系统的角度分辨率。在图1所使用的级联雷达系统中水平角度分辨率可达到1.4°,俯仰角度分辨率可达到18°的效果。
目前国内有不少厂商依托于TI成像雷达系统的级联方案进行系统改进,以达到更好的角度分辨率,级联方案来搭建成像雷达系统已成为当下的主流技术。
Arbe毫米波成像雷达系统---超大阵列和专用处理器方案
除了TI公司开发的级联雷达系统方案,以色列Arbe公司开发出了目前最大的48发48收级联雷达系统方案,其虚拟通道数可以达到惊人的2304,大大的提升了毫米波雷达系统的角度分辨率,与此同时随着虚拟通道数的增加,传统的处理器无法解决毫米波雷达系统信号处理和数据处理,Arbe公司也推出了自己的专用毫米波雷达处理器芯片,使得毫米波雷达系统的集成度更高,数据处理更加高效。图2中为Arbe公司成像雷达系统实物图,从图中可以看出该成像雷达系统采用口字型阵列来设计MIMO雷达,可同时在水平维度和俯仰维度探测目标。图3中为Arbe公司雷达专用处理器框图,从其展现的框图中可以看出,在该专用处理器中增加了其独有的雷达信号处理硬件加速模块,以更好的解决成像雷达系统中数据高吞吐量的问题。
从Arbe的技术方案中可以看出,超大规模的MIMO阵列将可能是一种技术趋势,而在使用超大规模MIMO阵列后需要考虑产生的海量数据如何有效处理的问题,因此专用的成像雷达系统硬件加速模块是需要的,关于这点国内还比较空白。
Uhnder公司---PMCW雷达的领跑者
不同于传统FMCW信号波形,Uhnder公司采用的PMCW波形通过多天线同时发射正交相位编码信号的方式来探测目标的距离和速度,该方案不仅可以探测更远距离,同时在有效探测目标的同时可以有效的抗除雷达与雷达之间的相互干扰。在19年的ISSCC论文[1]中Uhnder公司已经发表了其相关研究成果,在单科芯片中集成12发16收的雷达阵列。
总结以上公司的技术演进路线,我们可以发现在4D毫米波成像雷达系统存在以下亟需解决的技术难题:
(1)、成像雷达系统的阵列设计问题
在4D毫米波雷达系统中,通过MIMO使得系统虚拟通道数得到了极大提升,因此如何设计阵列以达到高精度的角度分辨率成为其中的一个难题。在已有的学术研究中将12个3发4收的MIMO芯片进行级联,构成36发48收MIMO雷达系统,可达到1728个虚拟通道。通过遗传算法来设计稀疏阵列,使得雷达孔径更大,水平角分辨率可达到0.78°,俯仰角分辨率可达到3.6°。可以发现随着天线数的增多,在未来的成像雷达系统中,其阵列排布和角度分辨率将会得到更一步的优化和提升。
与传统相控阵雷达相比,MIMO雷达的最大特点在于采用波形分集技术。波形相关系数是表示波形分集的重要参数,MIMO雷达的各天线发射正交信号,波形间的相关系数为0,在空间形成低增益宽波束,接收端通过DBF合成多个接收波束,实现覆盖大空域的探测。对于MIMO正交波形设计,使用者希望设计的波形尽可能地具备高分辨率、低旁瓣、良好的正交性,目前常用的四种方法为时分复用(TDMA)、频分复用(FDMA)、多普勒分集复用(DDMA)、码分复用(CDMA)等。表1中对各类正交波形做了总结,现有的雷达芯片中已经可以支持交替发射TDMA、CDMA和DDMA波形,因此如何复用波形以提升阵列使用效率成为设计者应该思考的问题。
(2)、成像雷达抗干扰问题
随着车辆使用毫米波雷达系统的增多,雷达与雷达之间的干扰日益严重,在相同的中心频率内使用线性调频信号,很容易产生相互之间的干扰,为此如何消除系统干扰成为待解决的难题。
为此,不同的公司开发出不同的方案来解决该问题。如图7中所示,为Arbe公司的波形设计专利中使用多个频率跳动的窄带信号合成宽带信号来规避雷达之间的相互干扰。当然,该方法的正确与否还有待研究与挖掘。
(3)、毫米波雷达专用处理器问题
随着毫米波雷达系统通道数的增多,传统的处理器无法满足毫米波雷达系统大吞吐量数据的需求,因此迫切需要设计符合大阵列大吞吐量的雷达专用处理器芯片,近年来除了arbe公司提出了自己的专用处理器方案外,也有像NXP这样的老牌玩家在设计相关的雷达专用处理器模块。
4D毫米波雷达的深度学习
4D毫米波雷达相较于传统的3D毫米波雷达有更丰富的信息,如何有效的将深度学习框架应用到4D毫米波雷达中是自动驾驶性能提升的关键技术之一。从传统3D毫米波雷达的信号处理流程中我们可以看到,频信号经过ADC后接入毫米波预处理流程,经过距离和速度2个维度的FFT之后,进行CFAR检测在空间维度上剔除大量噪声,然后利用第3个维度的FFT来获取波达角,生成稀疏点云,继而进行聚类和跟踪,最后进行目标分类后输出。
4D毫米波雷达增大了天线阵列,除了能增加高度信息外,还能提供更为丰富的点云信息,当点云信息足够丰富时,我们可以借鉴激光雷达的信号处理方式,采用类似于Voxelnet、CenterPoint、PointPillar等3D或2D网络来进行特征提取和识别。
在最新的研究中,也有人提出在进行距离和速度2个维度的FFT之后,不进行CFAR步骤,而直接进行第3个维度的FFT来获取4D张量信息,然后基于这个4D张量进行特征提取和识别。这种方式可以最大程度地保留有效信息,但是由于没有进行CFAR步骤,需要处理的数据量非常大,对于系统的带宽和算力都提出了较高的要求。
毫米波雷达与激光雷达----路在何方?
总体而言目前毫米波雷达系统仍处于百家争鸣的战国时代,尽管每家公司的雷达系统方案并不相同,然而都面临着算法和硬件系统的困境,亟需从算法、芯片和系统层面解决以上问题。
随着毫米波雷达系统的发展,其角度分辨率会逐渐逼近0.1°,而达到一些低端激光雷达的效果。不同于激光雷达系统直接对点云数据处理的固定方式,4D毫米波雷达系统自由的阵列和波形设计提高了系统的使用门槛,但也给了用户更多的发挥空间。而毫米波雷达系统相比于激光雷达,其波长更长,具有较为适宜的大气窗口,在全天候方面更具优势。FMCW在毫米波雷达上的成功经验已经被借鉴到激光雷达领域,1550nm FMCW激光雷达技术增加了速度维信息,抗干扰能力强,但离成熟商用还有一段时间的路要走。
毫米波雷达产业链及市场格局
国内毫米波雷达产业链分为三大环节:上游环节主要包括射频前段MMIC芯片、数字信号处理器DSP、天线高频PCB以及控制电路等;中游环节主要是从事毫米波雷达生产的企业;下游毫米波雷达主要用于无人机、车联网、ADAS等领域,国产厂商均有涉猎。比如无人机领域的大疆、航天彩虹等,ADAS的东风、长安等汽车厂商,车联网的大唐电信、百度等。
毫米波雷达产业链:
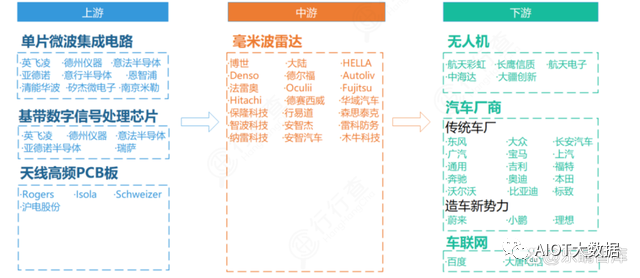
毫米波雷达整机国外厂商占据头部位置,但尚未出现垄断厂商,市场份额分散化分布及车厂分散合作模式给国产带来机会。
当然这个赛道上也是挤满了人,和汽车新能源一样,传统巨头们都在做例如Continental、Bosch、Hella、Denso、Aptiv 和 Veoneer,还有不少新势力杀入例如Ainstein、Arbe、Oculii、RFIsee、Vayyar、Aeres EM、Cognitive、Unhder。中国也不少,例如华为,华域,福瑞泰克,森思泰克,纵目。还有创业的楚航科技,威孚科技。
国内汽车产业的崛起以及车企的多元供应模式给国内相关提供了渗透条件。
2014年起,国内涌现大批毫米波雷达初创企业和相关上市企业,就产品指标而言,国产毫米波雷达与竞品相比无太大差别,均满足车规级要求,但在信噪比、探测精度、良品率等方面仍有一定差异,长期来看存较大进口替代空间。
2019年5月底红旗HS5搭载的森思泰克77GHz车载毫米波雷达成为国内首个真正实现“上路”的ADAS毫米波雷达传感器,突破了国际巨头垄断。
国内厂商如德赛西威、华域汽车、保隆科技、森斯泰克、承泰科技、楚航科技、隼眼科技、浙江智波、行易到、安智杰和纳雷科技等亦有布局。
其中,德赛西威和华域汽车24GHz和77GHz均已量产。德赛西威24GHz用于小鹏、奇瑞等;77GHz已量产,获自主品牌车企订单。
一、特斯拉推动的4D毫米波雷达有何不同
外网信息曝特斯拉HW4.0硬件系统配置一枚高分辨率毫米波雷达(可能为高精度4D毫米波雷达),且增加了雷达加热器,4D毫米波雷达关注度上升。
1、4D毫米波雷达创新之处?
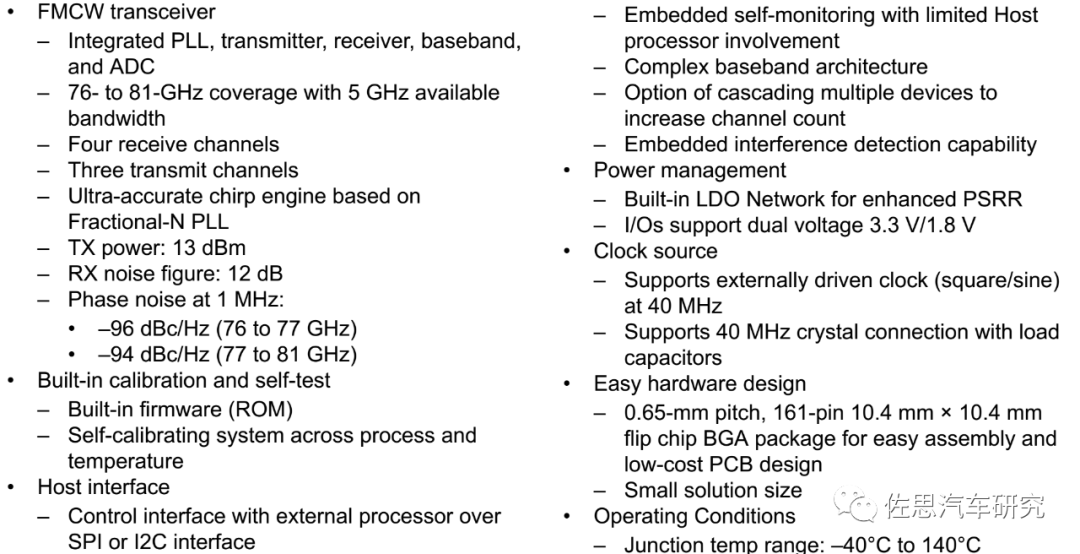
传统毫米波雷达通过发射调频连续波(FMCW),利用发射和接收信号时间差可计算出目标距离,通常拥有3D信息集(长/宽/速度)。常规毫米波雷达3T4R天线配置,【华为】4D毫米波雷达采取12T24R大天线阵列(12个发射通道,24接收通道),采取工程化创新堆叠射频天线组从而形成(长/宽/高/速度)4D数据集。
2、4D毫米波VS.毫米波雷达VS.激光雷达,革谁的命?
①性能:4D毫米波雷达可以cover毫米波雷达的性能,但是只能替代低线束激光雷达(16线),现激光雷达大多128线,堆叠过多射频天线成本很高且体积大。
②成本:传统毫米波(2-300元)/4D毫米波(1500元)/激光雷达(1500-3500元,补盲只需1500元)。
该产品主要用在L2+层级上,特斯拉HW4.0有可能前置1颗4D毫米波雷达兼顾毫米波&激光雷达性能,智能驾驶往L3以上智能硬件配置方案还有升级冗余必要性。
3、产业链价值分布及相关公司梳理:
毫米波雷达结构可分为射频前端,信息处理系统以及后端算法。射频部分占比约40%,其中MMIC(25%)、PCB(10%)、控制电路(5%)。信息处理系统DSP占比10%,后端算法占比最高达50%。
(1) 整机厂商:Arbe(全球4D毫米波雷达龙头)、经纬恒润(Arbe合作协议),威孚高科(Arbe合作协议),苏州豪米波(国产初创公司),联合光电(4D毫米波雷达研发中)
(2) 高频高速PCB(世运电路、胜宏科技、沪电股份、深南电路)
(3) MMIC射频芯片英飞凌全球龙头,硕贝德(4D毫米波雷达波导天线)
这次,并不是炒毫米波雷达,而是炒与Arbe相关的企业。
二、230221 威孚高科 4D毫米波雷达及公司近况交流
一、公司业务情况
21年 137 亿元营收,四大业务板块。31 家工厂,6 个研发中心。58 年成立从汽车业务起家,98 年拓展汽车后处理业务(威孚力达)。
2010年进军电机业务(增压器产品,威孚天力)18 年发布新战略转型轮毂电机。21 年布局新能源和智能网联业务,22 年智能电动和液压产品,和博世供应动力总成。
96年联合汽车电子成立合资子公司,98 年扩展后处理业务。2022年 6 月,成立威孚新能源子公司,博世汽车热管理系统子公司,还和博世在液压业务进行深入合作。
股权架构稳定,第二股东是博世,其他是公众。
营收稳定上升,20 年以后连续两年实现百亿元营收,汽车后处理 40%多,氢气占一小部分。
主要是几大业务,还布局智能电动、新能源、氢能等。节能减排有 3 块业务构成,油泵、涡轮增压、绿色氢能。
智能电动:电机系统和电机零部件,22 年在头部新能源客户批量供货,不断拓展头
部新能源客户,预计 25 年达到 500 万元规模。东风风神搭载公司轮毂电机。
热管理系统:通过并购博世项目,产品推进顺利,国内外获得多项目定点。
智能感知核心模组:4D 和 3D 毫米波雷达
舱内业务:汽车座椅 21 年开始布局,商用车小批量生产,向乘用车市场渗透。
其他产品:液压系统业务,22 年与博世胎压合作,工业液压市场化、国产化发展。
业务布局全球化,立足无锡,欧洲、北美业务布局,欧洲比利时、丹麦氢燃料业务,意大利油泵业务,在美国也有业务布局。形成 4 大业务板块,13 大业务领域。
二、问答
Q:汽车动力系统、新能源、智能网联布局完善,3-5 年战略方向?收入结构变化和未来收入体量?
A:转型定位汽车核心零部件,节能减排、电动化、智能化布局,液压和工业领域产品与国内很多汽车工程品牌和工程机械等实现协同。
2023 年热处理、涡轮是公司现有核心业务,行业目前已进入平稳期甚至长期衰退期,公司利用头部吸收效应,拓展现有产品的生命周期,混动出口有明显增加,公司有保供能力,下游 OEM 客户多。
电动:电机零部件、热管理延展现有业务,电动化 30%的战略目标。热管理系统在奥迪、大众、宝马、玛莎、保时捷等车型渗透,客户体系提升。轮毂电机方面公司合作伙伴 protean市占率第一,国内公司开发东风等两家 OEM 等合作伙伴。
氢能:通过并购、自主研究布局氢燃料电池业务,几个基地建设到位,25 年是重要拐点。22 年 9300 万元收入,今年预计是 14700 万元营收。德国、美国等都是公司客户,BOB 在中国有几条重要生产线。国内以 RBCP 品牌围绕高压布局,价格带覆盖大,深耕布局氢燃料。液压:公司目标 all in中国市场,做精益供应链,目前 100 亿以上规模为博世的。布局思路是上游做供应链与博世合作。
智能:车内智能跟博世合作,寻求渠道协同,舱外是雷达,舱内是座椅,开放合作。
智能座舱40%,今年 25 亿元营收.零部件 6-9 亿元
Q:4D 毫米波雷达进展?业务线起源?主要团队构成?最新业务进展?
A:18 年进入毫米波领域,率先从 4D 毫米波雷达切入,与 Arbe 合作。博世等合作伙伴深耕3D、4D 毫米波雷达,4D 的 arbe 方案、本土化方案将稳步推进。
4D 雷达价值量 100 多美元。3D 毫米波公司每年卖几千万只。
公司商业模式有弹性,与强 OEM、ADAS供应商合作伙伴合作紧密,公司与上下游相互渗透。商业化资源整合。Arbe 国外的方案也与公司合作。公司预计这块有 1billion 市场规模。
座椅价值量大,智能化后价值量也将上升。液压:公司有新项目定点,综合能源目前主要布局雷达、轮毂电机、热管理、电装、液压等几大业务,围绕电动化和智能化两个赛道。电动零部件和液压走现有客户延展路线。
Q:4D 毫米波雷达国内市场行业空间?公司定位?客户拓展方向和技术方向?
A:据罗兰贝格,4D 有千亿元规模。应用场景丰富,包括智能交通。公司在客户、产品方案全球化布局,4D 目前也得到主流认可。按行业理解,3D 雷达为普通雷达,4D 雷达分为 4D毫米波和 4D 成像,目前主流量产 4D 为第六代,公司偏向于升级版的第七代。公司定位 4D成像雷达,4D 成像是最终趋势,应用芯片方案解决低功耗、性能、价格等,满足主机厂需求。4D 有成为主流传感器的可能。
Q:整车厂主要考量 4D 毫米波雷达的哪些性能项目?通过公司目前与下游客户的商务交流来看,业务进展如何?如何利用 4D 毫米波雷达方案?
A:行业主要考虑以下方面:
可量产应用的功能。与特斯拉需求不同,蔚小理主导的国内城市 NOA 方案以多融合为主。过去的融合依赖视觉与毫米波雷达,L2 后有激光雷达的加入。但是加入激光雷达无法扩大融合的覆盖面(本质上都是光学传感器),所以特斯拉在 21 年取消了雷达。传统雷达无法解决低分辨率的问题,只能用来做测速。但是新雷达(高分辨率,尤其是 4D 雷达)出来后颠覆了市场,应用价值更大。相对于传统雷达。对于 L2(或以下级别),4D 雷达覆盖度更多,并且通过 4D 雷达与视觉目标级的融合,可以降低视觉算力的需求,节约成本;对于 L2+级别,其面临环境和工况越发复杂,必须提高传感器的精度 4D 雷达在角度分辨、点云输出精度等方面有优势)去覆盖一些经典的工况(如鬼探头等)。并且,从传感器本身迭代路线来看,传感器也需要不断升级,提高传感器的检测举例可以大大提升行驶安全性。
现在整车行业以软件定义的架构发展,传统雷达对于整车厂是黑盒子。我们的 4D 雷达可以提供更原始、更丰富的信息供主机厂做差异化应用、个性化开发。
安全性角度考虑,我们的毫米波雷达是纯固态,机械结构性、稳定性可靠。
目前都是在导入样车进行试验完善的阶段,还没到大规模商业化出货阶段,从 3D 到 4D 肯定有一个拐点。等到 L2.5 的场景真正到来之后市场规模有想象空间。目前我们需要踏踏实实完善技术,这样未来才能不断构建商业能力、推出多产品方案。
Q:ARBE 与经纬恒润在国内也有合作,威孚与 ARBE 的合作性质?
A:4D 成像目前提的人还很少,但是市场规模很大,威孚也希望有竞争力的玩家多一些。恒润是 ARBE 在中国的伙伴之一,恒润已经上市了,靠卖方案的业务起家,车身、底盘等系统都做,主业还是做系统。恒润卖现有的 3D 雷达有基础后,ARBE 与恒润在港口推了一些示范项目。威孚在智能时代专注做雷达的独立供应商,我们也希望生态圈丰富一些。
法律上威孚与 ARBE 不能强绑定,纽带上大家都希望巩固关系。先进入赛道,再不断拓展优势产品、提高竞争力。
Q:特斯拉 4D 毫米波雷达和 ARBE 芯片组都标了 Phoenix,是代表 ARBE 要给特斯拉供货吗?ARBE和台湾的电子厂有没有类似的战略合作关系?
A:是敏感信息。只能说方方面面都显示了4D 毫米波雷达 ARBE 方案的先进性。我们聚焦威孚自身的发展,ARBE 是我们用来输入加持的一张牌。
不能不负责任地讲在其他市场 ARBE 会不会找本土伙伴,ARBE 选择伙伴大多具有各自的个性化优势,并不是所有跟 ARBE 合作的伙伴都是基于其方案做整机产品的,但是能说从目前来看我们是他的主要伙伴。ARBE 的方案越多的人做、越多人配越好,因为我们做应用层开发,一些勾兑客户、融合算法驱动的能力是不可替代的。
Q:市场关注到的(比如特斯拉最新款车型)搭载的是第六代雷达(4D 毫米波雷达)还是第七代雷达(4D 毫米波成像雷达)?
A:内部信息无法透露,但是 4D 肯定(是雷达发展的)方向。整车厂具体车型装哪一代有各自经济性与技术性考量。
Q:威孚打算给 ARBE 配置多少资源来做芯片的应用和集成?
A:我们的工程化能力要进一步投入和加强。最近威孚在做一个商业平台的顶层设计(决定合作伙伴)。再往下的层面,如何整合各方资源也是要解决的问题。在商务上我们也在构建一些强整合市场资源的商务合同。
Q:博世研发毫米波雷达的形式(是否在威孚体系内,还是说各自在自己平台研发,技术成熟后会合作)?
A:毫米波雷达的研究我们一直在做,这个领域博世是世界第一,所以他一定有自己的研发体系。但是据我们了解博世也面临着一些在中国本土化的成本与速度挑战, 这是威孚的契机,我们也在推进本土化的战略布局与合作方案。蔚来威孚的路是善于合作,在市场上不是谁替代谁,而是大家价值互补,共同享受最大价值。
博世做 4D 成像,我们做 4D 毫米波,主流车型装哪一个还在等主机厂确认,因为市场没有到高热期。甚至在市场来到后,整车厂根据车型不同也会采取不同的硬件。我们与博世相互尊重,一起合作。
Q:4D 毫米波雷达的未来车型配置的生态(只装 1 个还是装 5-6 个)?在 25 年和 30 年两个时间节点会有多少比例车辆装配 4D 毫米波雷达?
A:渗透率可以参照工信部 L1-L5 在乘用车市场的渗透率。装配概念(标准化率)中关于雷达的指标在未来会有不同的差异化定义,不是绝对的 5R 概念,而是要完成 360 度的覆盖即可,不一定非要是 5 个雷达。但是主流的车型未来可能还是符合 5R 的趋势。
三、230221 对话苏州豪米波掌门人 会议要点
4D毫米波雷达为智驾硬件性价比之选:
(1)价格:4D成像毫米波雷达在1500-2000元之间,较3D毫米波雷达300-500元价格有较大提升,仍远低于主流激光雷达价格;
(2)性能:2芯片级联6发8收配置即可基本满足主机厂需求,可基本覆盖低线数激光雷达功能,且受恶劣天气影响更小,预计将在前向最先配置。
2025年有望迎来进一步平价化,性能将追赶高线数激光雷达:
(1)价格:目前成本主要来自射频芯片(单/双/多芯片方案价值差异巨大)、FPGA与板材,供应链国产化与通用芯片替代FPGA将有助于毫米波雷达短期内降本,预计2025年将达至低价区间。
(2)性能:随着CMOS技术发展,4D毫米波雷达有望在性能上追赶激光雷达,成为激光雷达平价替代方案。
4D软件成本较3D double,主机厂算法支持需求大:
4D毫米波雷达相较于3D雷达软件开发费用成倍提升。4D上车后,重新训练前融合与点云数的增加亦将要求供应商为主机厂提供更多技术支持。AI算法受成本限制投入尚少,预计特斯拉等厂商将继续采用传统雷达信号处理路线。
审核编辑:汤梓红
-
芯片
+关注
关注
463文章
54429浏览量
469358 -
特斯拉
+关注
关注
66文章
6420浏览量
131501 -
毫米波
+关注
关注
21文章
2060浏览量
68002 -
4D
+关注
关注
0文章
65浏览量
12705 -
毫米波雷达
+关注
关注
109文章
1171浏览量
66405
原文标题:4D毫米波雷达有何不凡之处
文章出处:【微信号:智能汽车电子与软件,微信公众号:智能汽车电子与软件】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
拥抱自动驾驶,4D成像毫米波雷达已悄然崛起!

剖析如何做好一款4D高分辨毫米波雷达

什么是4D毫米波雷达?
4D毫米波雷达加速了4D成像系统的可能性
4D毫米波雷达市场技术盘点
对比ZF和特斯拉的4D毫米波雷达设计,国产4D毫米波雷达迅速崛起
4D毫米波成像雷达的测试要求都有哪些嗯?




评论