INDEMIND三大AI平台助推机器人产业革新
从“自动化工具”到“自主智能终端”,机器人产业正经历深刻变革。在这一进程中,空间智能技术作为连接感知....
INDEMIND亮相联想集团首届创新加速器开放日
2月5日,联想集团在北京举办“新商业创新生态路演季3.0”创新加速器开放日活动。作为联想生态伙伴,I....
INDEMIND四大伙伴消费级AI机器人亮相CES 2026
今天,小D就带你快速回顾一下它们在CES 2026上的精彩表现,看看它们如何用不同的创意,解答关于“....
INDEMIND助力会畅科技旗下OLLOBOT机器人OlloNi亮相CES 2026
CES 2026,INDEMIND助力会畅科技旗下OLLOBOT,携新一代赛博宠物OlloNi惊艳亮....
INDEMIND邀您相约CES 2026国际消费电子展
CES 2026启幕在即,INDEMIND联合TCL、涂鸦智能、星巡智能、会畅科技亮相及全球首发多款....

INDEMIND视觉空间智能重构扫地机器人清洁逻辑
不知从何时起,扫地机器人陷入了“卷参数”“堆配置”的怪圈。传感器越加越多,吸力数值越飙越猛,电池容量....

INDEMIND脏污识别技术赋能扫地机器人功能进化
从吸力升级到扫拖协同,从基站功能迭代到机械臂应用,扫地机器人的每一次进化,都在朝着“更聪明”“更好用....







INDEMIND三维语义建图技术让机器人看懂立体世界
当行业还在为机械臂拖布、自动上下水等清洁模块不断狂卷时,扫地机器人正站在智能化跃迁的十字路口。这场从....
TCL携手INDEMIND重新定义家庭AI交互边界
继CES 2025首秀引发全球关注后,全球首款分体式AI陪伴机器人TCL Ai Me再次登陆AWE ....


如何让陪伴机器人更懂家庭
随着ChatGPT等AI的出现,《her》似乎不再是科幻。大家开始探索AI陪聊、AI心理咨询,甚至是....
INDEMIND助力打造世界首款分体式陪伴机器人
近日,一年一度的“科技春晚”CES 2025正式拉开帷幕。作为展示最新技术成果和创新产品的关键平台,....
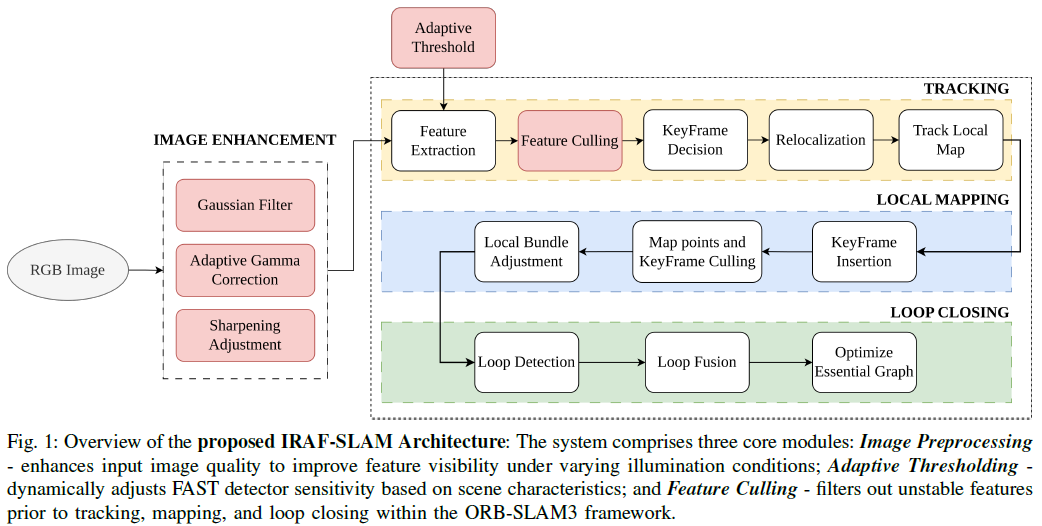
一种基于MASt3R的实时稠密SLAM系统
本文提出了一种即插即用的单目SLAM系统,能够在15FPS的帧率下生成全局一致的位姿和稠密几何图形。....
INDEMIND创新视觉技术助力机器人清洁模式革新
自扫拖功能的上线,扫地机器人在清洁系统上的死磕便从未停止。然而,随着各类创新技术越加越多,扫地机器人....




