 用于自动驾驶车辆的速度控制的参数
用于自动驾驶车辆的速度控制的参数

在自动驾驶研究的道路上,中国和美国是处于领先地位的。而国内首家自动驾驶研究代表为百度。早在今年3月份,中国也有了自己的一份《北京市自动驾驶车辆道路测试2018年度工作报告》,其中百度以45辆自动驾驶车辆规模,约14万公里的安全测试记录遥遥领先。这很大程度上反应了百度的自动驾驶研究技术的强大。
自动驾驶车辆中的运动规划和控制是关键操作点。而车辆中的运动规划和控制是与系统给定的路径的曲率和速度来估计完成给定路径的难度的。这其中属速度控制机制最为复杂,但是速度控制(例如,油门、制动器)动态模型在增加自动驾驶中的车辆路径跟踪精度方面是至关重要的。接下来小编将详细介绍百度公司的专利中提出的方法是如何解决这个难题的。
自动驾驶车辆中的速度控制过程如图1所示,整体上来看,整个过程图以速度控制器模块为中心接收到的输入数据有三大部分:
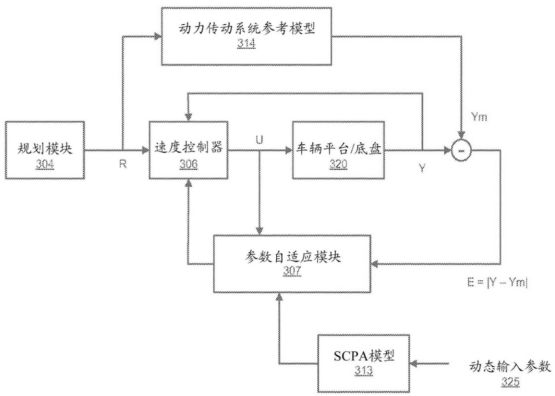
图1速度控制器的过程图
1)第一是规划模块根据自动驾驶汽车的决策数据生成汽车的目标速度(R)的规划和控制数据。
2)第二是车辆的实际速度(Y),它是响应于速度控制命令而测量的。
3)第三部分的输入是最复杂的,也是最重要的,主要是参数自适应模块的输出数据,而参数自适应模块的输出是由三个反馈参数决定的。
其一是自动驾驶汽车实际速度和预期速度之间的差值反馈。其二是速度控制参数调整模型SCPA的输出反馈数据。SCPA模型是基于在先驾驶统计信息离线地创建和建模的机器学习模型,其中模型的输入是运行时被捕获或测量的动态输入参数,包括天气状况、道路状况、当前交通状况、风阻、地图位置和/或兴趣点、车辆的重量、车轮的轮胎压力和当前作为车辆乘客的用户的用户驾驶偏好等。其三是实际速度命令。
速度控制器根据输入的三部分数据,将速度控制命令U作为输出,输出到车辆平台和参数自适应模块。
接下来,详细的了解一下操作自动驾驶车辆的速度控制器的速度控制参数的过程,如图2所示。
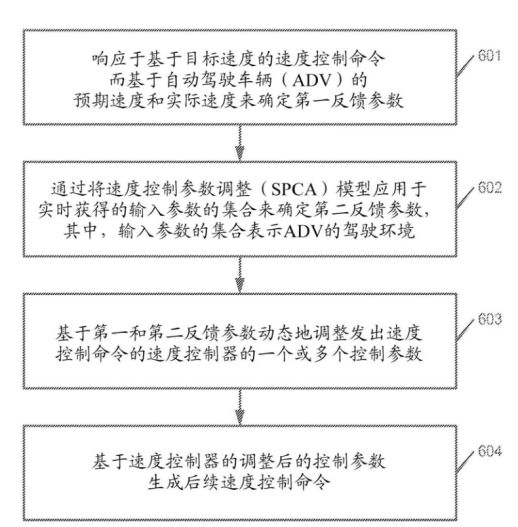
在操作601中,处理逻辑响应于基于目标速度发出的速度控制命令而基于ADV的预期速度和实际速度来确定第一反馈参数。
在操作602中,处理逻辑通过将SPCA模型应用于实时获得的输入参数的集合来确定第二反馈参数。
在操作603中,处理逻辑基于第一和第二反馈参数动态地调整发出速度控制命令的速度控制器的一个或多个控制参数(例如,系数、增益)。
在操作604中,处理逻辑基于速度控制器的调整后的控制参数生成后续的速度控制命令。
尽管速度控制机制很是复杂的,但是百度公司巧妙得利用多方面参数迭代反馈的方式,让自动驾驶汽车的速度控制参数不断更新,从而减少模型预计产生的误差,这种方式让小智很是受益。
-
百度
+关注
关注
9文章
2389浏览量
95232 -
自动驾驶
+关注
关注
795文章
15010浏览量
181680
原文标题:百度专利带你了解自动驾驶车辆如何控制速度?
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
自动驾驶横向与纵向控制模块各有什么作用?
自动驾驶端到端为什么会出现黑盒现象?

自动驾驶汽车如何完成超车?

自动驾驶汽车如何实现自动驾驶

如何设计自动驾驶传感器失效检测与容错策略?

语言模型是否是自动驾驶的必选项?

自动驾驶中常提的ODD是个啥?

小马智行第七代自动驾驶车辆三城开跑
什么是自动驾驶数据标注?如何好做数据标注?

自动驾驶汽车是如何准确定位的?




评论