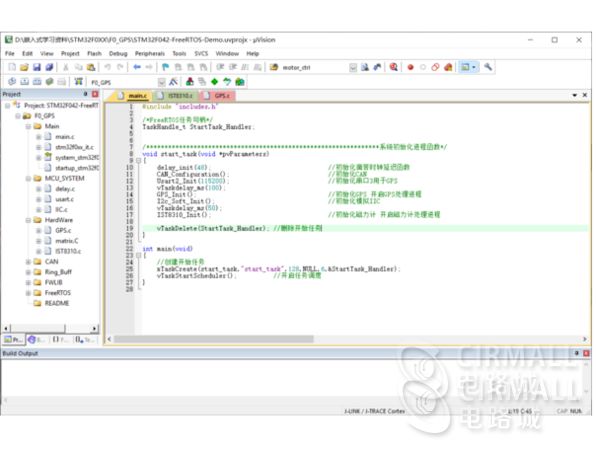
 基于STM32F0的GPS模块,带CAN通讯+IST8310磁力计
基于STM32F0的GPS模块,带CAN通讯+IST8310磁力计

个人研发的GPS模块,GPS芯片采用现在无人机应用最火的Ublox-M8N-010(大疆无人机同款),在相同上电时间的条件下,可达信号和搜星能力不输淘宝任何一家专业做GPS的店铺,位置和速度数据精度秒杀淘宝做6M系列GPS模块,而且内置IST8310磁力计,开源PCB和软件。
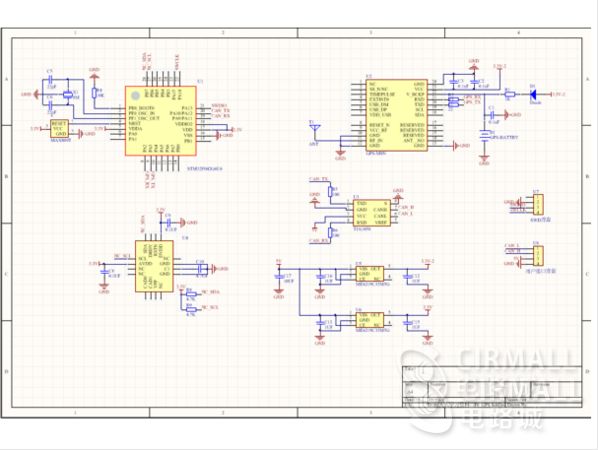
已在自己的无人机上进行测试,与加速度经行融合轻松实现厘米级别的无人机定位,2元一个的无源天线设计,UbloxM8n010 外加一个CAN通信功能用来传输GPS数据和IST8310磁力计数据。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
芯片
+关注
关注
463文章
54429浏览量
469367 -
gps
+关注
关注
22文章
3044浏览量
173978 -
无人机
+关注
关注
237文章
11380浏览量
196697
原文标题:基于STM32F0的GPS模块,带CAN通讯+IST8310磁力计
文章出处:【微信号:cirmall,微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
STM32F042x4/STM32F042x6微控制器深度解析:特性、应用与设计要点
STM32F042x4/STM32F042x6系列微控制器集成了高性能的ARM® Cortex® - M0 32位RISC内核,最高运行频率可达48 MHz。它拥有高速嵌入
静态定向之谜:为什么高端GNSS设备都离不开这个小小的磁力计?
系统的固有缺陷:它可以告诉你“在哪里”,却无法在静止时告诉你“朝向哪里”。这正是磁力计在GNSS接收器中不可或缺的原因。二、毫米级“电子罗盘”:磁力计如何解决导航的

新品登场丨打造高效CAN/LCD应用的新选择:32位MCU MG32F02N/K系列
笙泉首款32位 CAN+LCD MCU (MG32F02N系列)及32位 LCD MCU (MG32F02K系列),专为非车规CAN通讯与L

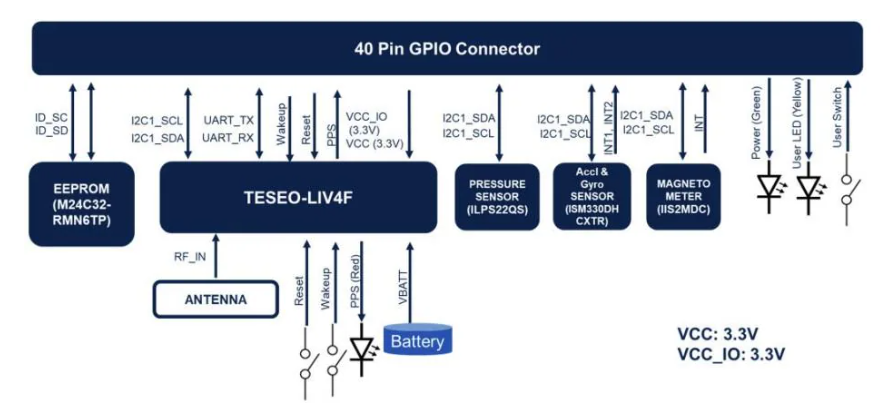
X-STM32MP-GNSS2扩展板技术深度解析
iNEMO 3轴加速度计/陀螺仪、IIS2MDC 3轴磁力计和ILPS22QS压力传感器。X-STM32MP-GNSS2板通过STM32MP157F-DK2 GPIO连接器由标准3.
浅谈HMC5883L和QMC5883P磁力计的区别及STM32F103驱动
HMC5883L和QMC5883P是两款硬件兼容但软件不兼容的磁力计芯片,主要区别在于寄存器地址、设备地址和磁场方向定义。本文提供了HMC5883L的初始化代码和寄存器配置说明,包括采样率、量程设置
寻北级别精度的MEMS IMU
寻北IMU是一种无需依赖GPS或磁力计等外部参考,通过利用内置陀螺仪检测地球自转角分量,经过解算即可确定真北方向的IMU。与磁力计测量出的磁北不同,真北是固定不会改变的,是地球自转轴指向的方向。磁北
6轴步进电机驱动+STM32F767+485+CAN+网口+12输入输出原理图
6轴步进电机驱动+STM32F767+485+CAN+网口+12路输入输出 原理图 步进电机驱动方案TMC5160
发表于 06-27 16:18
•1次下载
零知经验——STM32F4驱动ICM20948 九轴运动传感器 + VOFA上位机可视化验证与抗漂移优化
4.7kΩ上拉
AD0VCCI2C地址选择固定地址0x69 2.2 硬件接线图
接线细节:
上拉电阻必须接在SDA/SCL与3.3V之间
电源走线远离电机等噪声源
磁力计与铁磁材料保持>
发表于 06-06 10:03
STM32F103TBU6 封装是VFQFPN36 将PD0和PD1配置成CAN不成功是什么原因?
规格书上可以配置成CAN, 程序配置好后发现发送数据没有邮箱。然后在STM32CubeMX软件进CAN配置发现STM32F103TBU6封装是VFQFPN36PD
发表于 06-06 06:42
优化无人机航向控制的核心:IST8310飞控地磁传感器解析
。这是无人机实现自主导航和精确定位的基础。二、辅助姿态控制在无人机飞行过程中,地磁传感器与其他传感器(如陀螺仪、加速度计等)协同工作,共同感知无人机的姿态、位置和运

带 GPS/GNSS/BDS 前置滤波器的屏蔽式低噪声放大器前端模块 skyworksinc
电子发烧友网为你提供()带 GPS/GNSS/BDS 前置滤波器的屏蔽式低噪声放大器前端模块相关产品参数、数据手册,更有带 GPS/GNSS
发表于 05-09 18:34

SKY65728-11: 带 GPS L5 预滤波器的屏蔽式低噪声放大器前端模块 skyworksinc
电子发烧友网为你提供()SKY65728-11: 带 GPS L5 预滤波器的屏蔽式低噪声放大器前端模块相关产品参数、数据手册,更有SKY65728-11: 带
发表于 05-09 18:32
STM32F103TBU6封装是VFQFPN36,将PD0和PD1配置成CAN不成功是什么原因?
规格书上可以配置成CAN, 程序配置好后发现发送数据没有邮箱。然后在STM32CubeMX软件进CAN配置发现STM32F103TBU6封装是VFQFPN36PD
发表于 04-27 08:41



评论