 无人机管家免费开放精灵4RTK机型的后差分解算功能
无人机管家免费开放精灵4RTK机型的后差分解算功能

2018年6月大疆发布了新一代了精灵4 RTK,这款无人机在原机型的基础上增加了RTK/PPK功能,使得精灵4 RTK在一定条件下具备了少像控或者免像控的能力。为了能给广大用户带来更好的服务体验,飞马无人机管家将在今天上线的版本上,免费开放精灵4 RTK机型的后差分解算功能,用户无需购买,下载更新软件即可使用。
飞马“无人机管家”是无人机数据获取、处理、显示、管理以及无人机维护的一站式智能GIS系统,支持固定翼、旋翼等种类丰富的飞行平台,满足各种应用需求的航线模式,支持真三维地形数据的精准三维航线规划、三维实时飞行监控、快速飞行质检,具有丰富的数据预处理工具箱,支持稳健的精度控制和自动成图、丰富的4D和三维成果生产,具有可视化监控中心,提供系统升级、智能维护、信息推送等云服务。
一、差分解算
这里以精灵4 RTK实际飞行数据为例,讲述无人机管家针对精灵4 RTK数据的差分解算流程。
1、数据获取
采用精灵4 RTK在天津宝坻无人机综合验证场进行飞行测试,测区内布设有固定靶标,可进行精度核查。此次飞行设计地面分辨率2cm,飞行高度73m,航向重叠度80%,旁向重叠度60%,架设飞马配备的基站(可支持全部型号基站),飞机连接千寻CORS进行实时RTK数据获取。
航线设计
测区情况图及靶标分布图
2、数据整理
飞行获取数据如下:
Ø 原始影像数据:DCIM文件夹
Ø 基站GPS静态数据:_4722471.GNS文件
Ø 机载GPS观测数据:包括GPS观测原始数据、RTK轨迹、打标时间及偏心改正等信息文件。
原始数据
3、后差分解算
采用无人机管家“智理图”模块的GPS处理工具进行差分解算。
第一步:
采用”RT27转RINEX”工具将基站.GNS格式转换为.O文件(Rinex格式),若使用其它厂家基站,则导出Rinex格式即可。
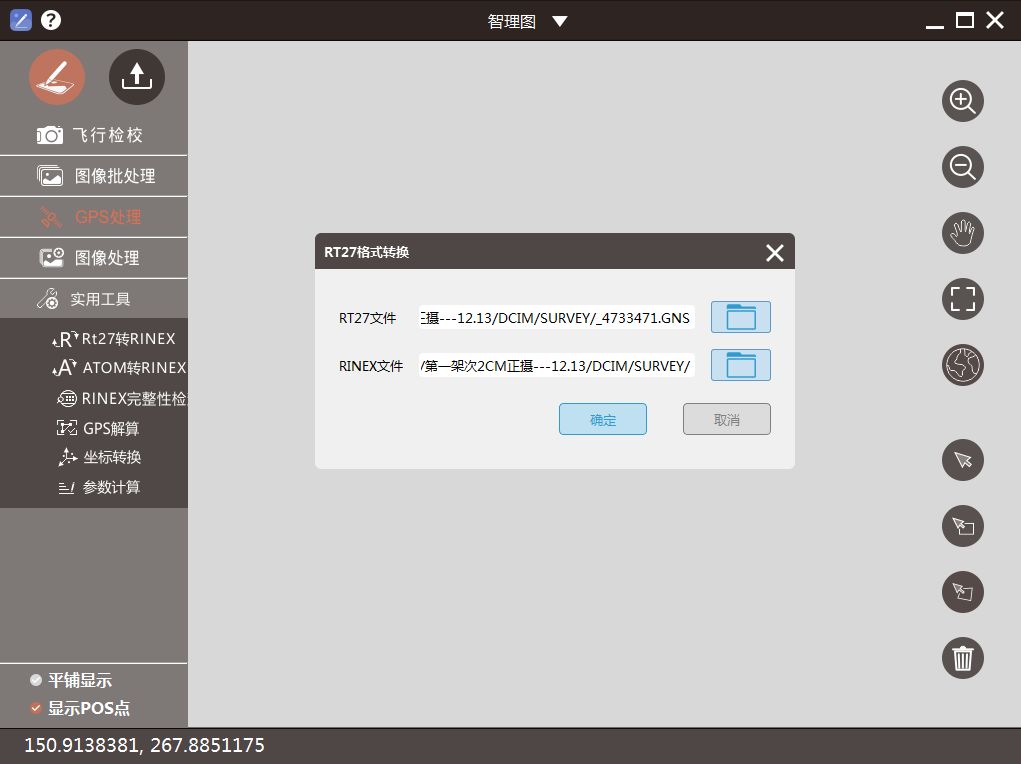
RINEX格式转换
第二步:
点击“GPS解算”,进行以下设置:
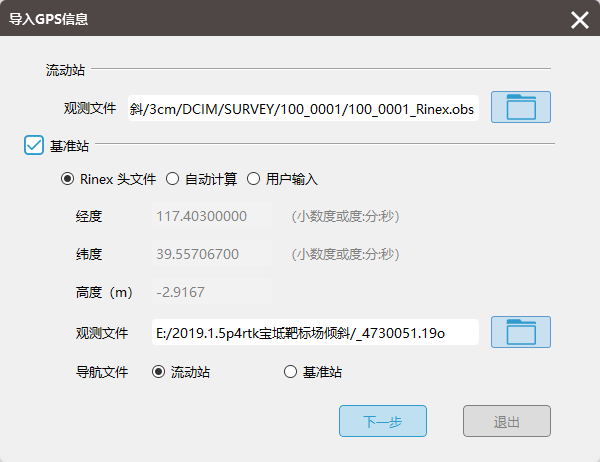
1)流动站设置
观测文件为飞机观测GPS数据,精灵4 RTK数据格式为.obs格式
2)基准站设置
Ø 勾选基准站
Ø 单击“用户输入”,填写基站WGS84经纬度椭球高坐标。
Ø 选择基站观测数据,须转换为rinex格式文件。
Ø 导航文件默认为“流动站”
点击“下一步”

差分解算参数设置1
第三步:
参数设置:
1)解算方式:勾选差分
2)GPS天线:直接输入垂高即可,该数据由于直接量测的为相位中心坐标,因此垂高为0
3)GNSS系统:勾选GPS,BeiDou
4)保存路径:设置输出路径
点击“确定”,软件进行差分解算。
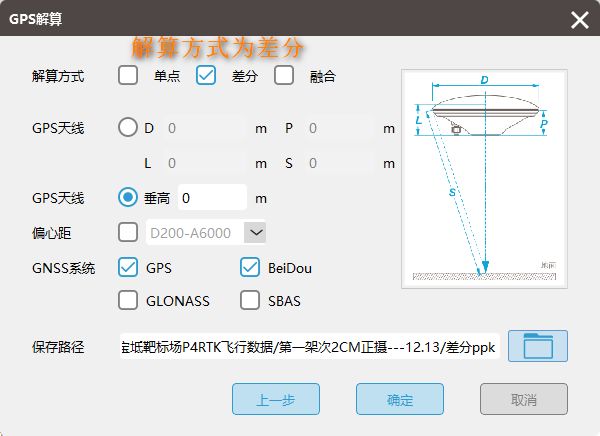
差分解算参数设置2
第四步:
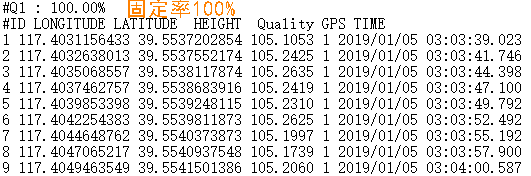
经差分解算,输出高精度差分结果,检查其固定率为100%,表示每个曝光点的GPS值均为固定解,该高精度GPS数据即可用于后续数据处理。

GPS差分解算结果
二、无人机管家全流程处理
针对精灵4 RTK获取的高精度后差分数据,无人机管家专业版支持免像控空三,及控制点和差分POS的联合平差,还可进行点云、DSM、DOM/TDOM、2.5D及3D模型成果输出,可以满足客户全方位的数据获取及生产需求。
全成果输出
1、免像控空三
采用无人机管家“智拼图”模块,基于高精度GPS和影像建立工程,一键式处理得到免像控的空三成果。
一键免像控空三
免像控点位预测
测区内一共12个控制点,将其全部作为检查点,软件可输出检查点空三残差报告,具体如下:
检查点平面中误差0.094m,可满足1:500航测平面精度要求。
检查点高程中误差为1.330m,且高误差为一个系统性误差,推测其产生原因在于旋翼姿态过于平稳,平差约束相对薄弱导致,其可通过飞构架航线或者倾斜航线来提高高程精度。
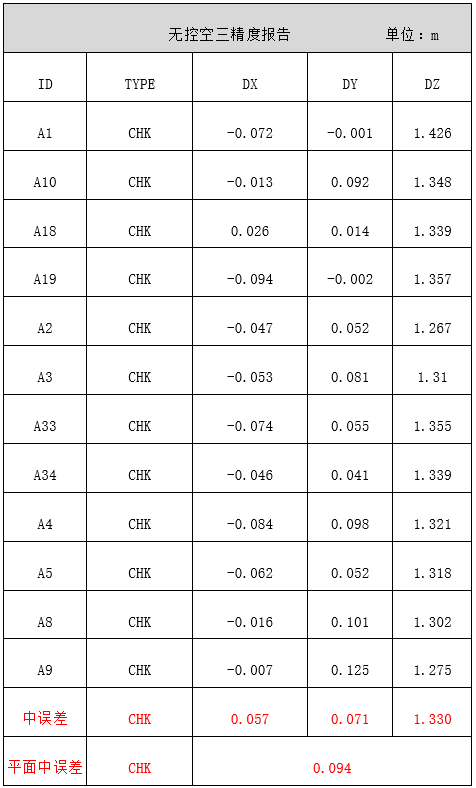
无控空三精度报告
2、“控制点+高精度GPS”联合平差
为提高精灵4 RTK高程精度,可采用“控制点+高精度GPS”联合平差的模式,来实现高精度GPS下的稀少控制点成图,满足1:500测图要求。这里分别对后差分PPK模式和实时差分RTK模式进行了数据处理精度验证。
1)PPK模式空三处理
选取测区最外围四个点当做控制点,其余点当做检查点,进行“控制点+PPK”联合平差处理,且软件在空三的同时可进行相机的自检校。
智拼图刺点界面(黄色点为控制点,蓝色为检查点)
控制点+高精度GPS联合平差
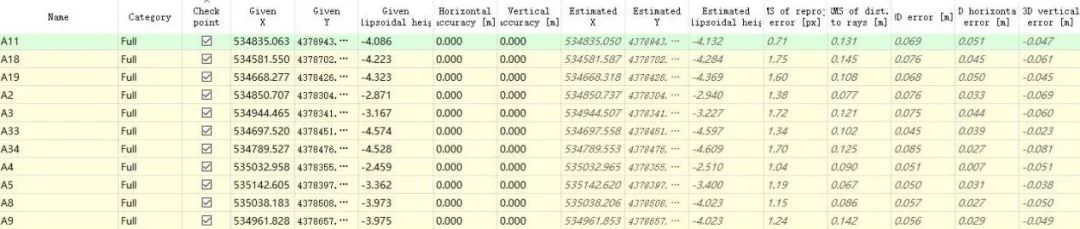
其空三精度统计如下:
控制点的平面中误差为2.5cm;高程中误差为4.3cm,
检查点的平面中误差为5.0cm;高程中误差为4.4cm,
由此可知,基于少量控制点和高精度后差分GPS进行联合平差处理,高程精度可大大提高,满足1:500测图要求。
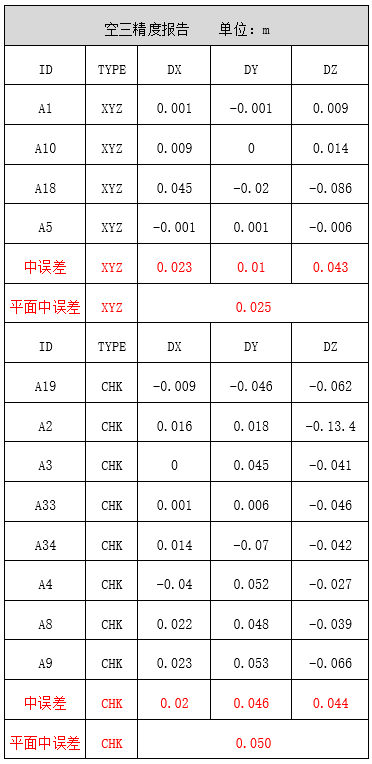
空三精度报告(控制点和检查点)
2)RTK模式空三处理
无人机管家还支持基于精灵4 RTK获取的实时高精度GPS进行联合平差处理,控制点设置和PPK模式相同,其空三带控精度精度统计如下:
控制点的平面中误差为2.0cm;高程中误差为4.1cm,
检查点的平面中误差为4.6cm;高程中误差为5.1cm,
其精度同样满足1:500测图要求。
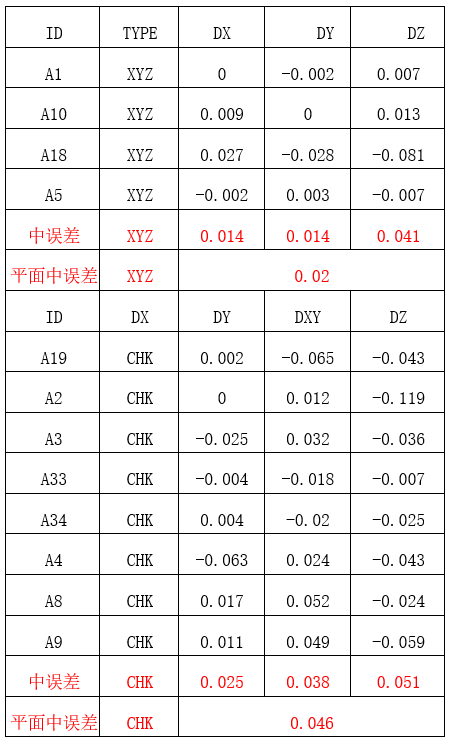
空三精度报告(控制点和检查点)
3、全成果输出
基于高精度空三结果无人机管家可一键输出密集点云、DSM、DOM/TDOM成果。
密集点云
DSM成果
TDOM成果
4、结论
由此次测试可知,飞马无人机管家可进行精灵4 RTK的后差分GPS解算,可获取高固定率的高精度GPS数据。且基于高精度GPS成果,无人机管家还支持免像控或者稀少控制的空三处理,输出点云、DSM、DOM等多种成果,满足1:500大比例尺成图测图需求。其RTK模式和PPK模式均可满足一定条件下的稀少控制点高精度成图,而常规我们建议尽可能采用PPK模式进行数据处理,可避免飞行时候由于信号不好RTK中断或者距离过大造成的精度不好的问题。
三、精灵4 RTK倾斜免像控案例
基于精灵4 RTK还可进行倾斜数据获取,再基于无人机管家进行差分解算,可进入三维建模软件ContextCapture进行空三及建模处理。经实际飞行测试,精灵4 RTK可实现小范围的免像控高精度三维模型的获取。具体如下:
1、数据获取
测区采用交叉倾斜航线,地面分辨率为3cm,飞行高度110m,航向重叠度为80%,旁向重叠度80%;结合精灵4 RTK的续航能力,飞行过程采用全程飞行,共计飞行2架次,采集影像795张。
航线示意图
影像数据
2、差分解算
采用智理图进行差分解算,解算流程与上一案例解算流程相同。
GPS差分解算
GPS差分解算结果
3、CC空三及建模处理
导入影像和高精度差分GPS,进行空三处理和刺点,并将所有点勾选为检查点。由CC点位自动预测可知,空三后预测控制点位置与实际位置偏差2个像素以内。
空三3D视图
CC刺点界面预测点与实际点偏差统计
检查点点位预测
提交模型生产,成果如下图。模型纹理清晰,几何结构完整。
模型整体
模型局部
模型局部
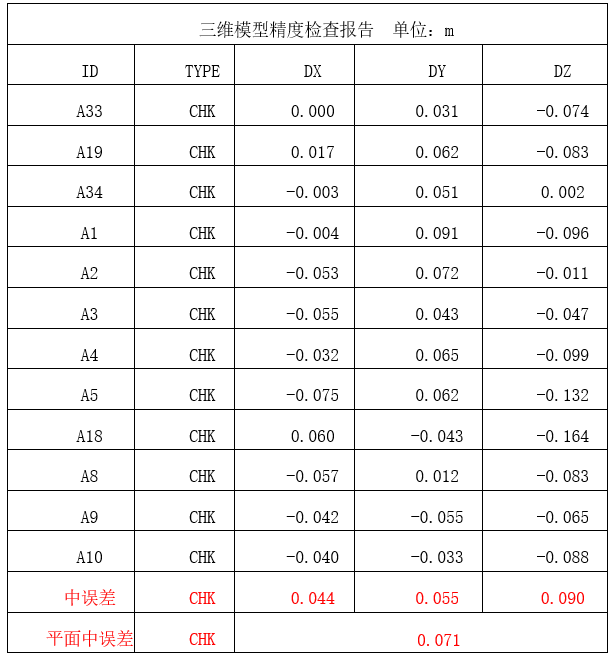
4、精度检查
将模型上检查点坐标与实测坐标做对比,得到精灵4 RTK在用PPK模式下的倾斜免像控精度。
检查点平面中误差为7.1cm,高程中误差为9cm,可满足1:500测图精度要求。
5、结论
由以上测试可知,将精灵4 RTK应用于三维实景建模,基于无人机管家解算出的高精度GPS,可在三维建模软件中进行倾斜免像控处理,满足1:500测图要求。这对于小场景三维建模来说可极大节省人工布设控制点的工作量,提高作业效率,且最终生成的模型几何结构完整,纹理清晰,可用于后期三维测图需要。
-
gps
+关注
关注
22文章
3012浏览量
172603 -
无人机
+关注
关注
234文章
11146浏览量
193449
原文标题:无人机管家免费开放精灵4 RTK后差分解算功能
文章出处:【微信号:feimarobotics2015,微信公众号:飞马机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
请问多旋翼无人机单个电机故障怎么排查问题?
无人机智能巡检系统的技术特点与应用优势
ce认证对无人机有要求吗

离轴技术:赋能无人机精准配送的核心芯片应用
科普|无人机反制枪介绍

低空物流:无人机开启未来配送新篇章
使用 Betaflight 和树莓派实现 FPV 无人机自主飞行!

无人机高速公路巡检系统:守护道路安全的空中管家
《手把手教你做星闪无人机—KaihongOS星闪无人机开发实战》系列课程课件汇总
无人机低延时目标跟踪识别智算系统
连接器如何支撑无人机复杂系统运作?





 工商网监
工商网监
评论