 日本情感机器人拆解 全球仅1000台
日本情感机器人拆解 全球仅1000台

上月中旬,阿里巴巴和富士康大手笔投资了一个日本人性机器人——Pepper,据称是有感情的,可以与人交流,识别人的情绪,并在与人“相处”的过程中不断学习人的习惯和喜好,但有关这款产品的很多还是个未解之谜。
从媒体得到的消息来看,Pepper受到日本民众的极度欢迎,在6月20日首批1000台开卖后,1分钟内便被订购一空。而根据日媒消息,Pepper将于本月31日上午10点开始第二波售卖,备货数量依然是1000台。
据悉,这款身高1.2米机器人售价21万3840日元(约合1万元人民币)。加上使用APP所必备的基本套餐费和修理保险费,如采用三年分期付款的方式,每月需支付2万6568日元(约合1300元人民币)。
Pepper目前仅限于日本本土市场,暂时与我们无缘。不过《日经电子》入手了一台Pepper,并且把它拆了,我们得以一窥这款机器人的内部构造。
Pepper是一款服务型的人形机器人,身高120cm,体重28公斤,胸前自带一块10.1英寸的触摸屏,其锂电池可让其持续工作超过12个小时。
打开纸箱,整面的蓝色和“六”字映入了眼帘。看上去像“六”的图案,其实这是法国Aldebaran Robotics公司的LOGO。该公司是孕育Pepper的企业,后被日本软银收购并以此为基础成立了软银机器人控股公司(SoftBank Robotics Holdings),简称SBRH。
打开蓝色包装箱,Pepper就像图坦卡蒙法老一样放在里面。动手取出时,Pepper的脖子和腰关节的部分“软趴趴”的,一个人扶不起来。“这不禁令笔者回想起在学生时代,曾经搀扶过烂醉如泥的学长。”据专家解释称,“软趴趴”的状态是为了在运输和移动的时候,“防止关节部分承受负载,导致齿轮和马达损坏”。
解除这一状态需要拔下腰和脖子各自的保险栓——在脖子后面有紧急制动开关的保护壳,打开保护壳,就能看到容纳保险栓的部分。
正式启用前,需要先行充电。充电装置位于Pepper的后面底部,支持普通家用电源(日本制式为110V)。
充电结束,打开了Pepper胸前的电源开关。“双臂下垂,看上去疲惫不堪的Pepper终于动了起来。只见它挺起腰杆,仿佛是在确认自己的存在,开始环视四周。”
“初次见面,我是Pepper!”完成初始设置后,Pepper配合着动作,进行自我介绍。可能是因为120cm的身高和独特的尖嗓门,面对Pepper就像是在面对小学生。感觉不到压迫感。
但Pepper的语言识别能力似乎还有改善的余地。在为获取天气预报而设置地区的时候,我们说“东京”,但识别出的却是京都、岐阜,一个比一个离谱。
而对于有的人,Pepper更是答非所问,看来沟通还需要一定的技巧。通过与Pepper对话,在正面看着Pepper的眼睛说话,识别的精度比较好,对来自后方的招呼则反应迟钝。这可能是因为不锁定对话的对象,Pepper就无法判断是对话,还是环境噪音的缘故。
此处省略各种合影,直接进入拆解正题。
首先是头部。头部很容易与身体分离,只要用手拖着头部,打开脖子旁边的两个卡榫,即可将其取下。头部与身体之间只有为数不多的几个连线。
从覆盖Pepper表面的外装部件上几乎看不到螺丝。基本都是利用里面的卡榫,在内部进行固定的,覆盖头顶的面板状部件也不例外。
接着再拆下头顶的外板,麦克风阵列和触摸传感器映入了眼帘。
Pepper的头部嵌入了相当于人的眼睛、耳朵和嘴巴的部件,但设置的位置与真人不同。相当于耳朵的麦克风阵列位于头顶,而人耳所在的位置则安装着扬声器。
看起来像是眼睛的部分,里面安装的是距离图像传感器。应该是通过左眼发射红外线照射外部物品,通过右眼的传感器接收反射线并检测距离。距离图像传感器上面有一块橙色的电路板,上面排列着LED,环绕在发光部和受光部周围。其作用是按照Pepper的状态,使其“眼睛”的周围呈现粉色或绿色。
那么,相当于人类眼睛的摄像头在哪里呢?上图中“面部”外壳背面的2个部件就是。它们分别从额头上的开口和看上去像嘴巴的开口,观察外界的情况。
在其头顶部,安装着英特尔凌动处理器。但话说回来,处理器为什么要内置于头部?
正如Pepper的眼睛和耳朵所体现的那样,机器人的构成要素的配置没有必要与人类相同。一个假设是智能可以升级。考虑到头部比较方便取下,这可能是为了在今后,能更换配备新处理器等的头部,从而在不改变主机的状态下强化功能。
开始拆解Pepper的躯体部分。打开外壳后,里面还有一层,拆下之后露出了3个风扇。估计分别是用来冷却颈部、左臂及右臂的驱动马达的。正中央的风扇体型最大,可能是因为颈部马达的负荷较高的缘故。
风扇下方有一块电路板,可能是用来进行电源分配的。顺便一提,下图中上端的红色按钮是紧急制动按钮。风扇嵌在一个机构部件上,该部件通过顶端的4颗螺丝固定。拆掉这些螺丝后,该机构部件可以自上而下打开,驱动各个部位的致动器便显露出来。
同时,露出的内部是由纵横交错的几个面组成的复杂结构,这可能是为了保证强度。
接着拆下两条胳膊。拿在手中觉得比想像中要重得多。
渐渐地,Pepper的上半身越来越“瘦”,逐渐变成了一个空壳。
接下来是拆解腰以上的上半身——松开几颗螺丝,拔出了几根线缆。
连接上半身和下半身的,是疑似为信号线的扁平电缆,以及估计是用来供电的4条粗电缆。Pepper是电池驱动的产品,只要打开了胸前的电源开关,就会一直保持通电状态。
拆下脚部的外壳,露出了全方位轮(全方位移动型车轮)。
拆解完毕,Pepper的设计究竟好不好呢?对于这个问题,《日经技术》一位研究机器人20年的专家给出的回答是:硬件的确很出色。但是要做出评价,首先需要定义这是用于何种用途的机器人。也就是说,Pepper的用途到底是什么。
他表示,“其实很希望软银能够推出令人赞叹的APP,哪怕是1个也好。但到目前为止,还没有看到令人惊喜的方案。仅仅停留在对话、护理、游戏等之前都想到的范围之内。估计现在最大的用途,应该是以与用户对话为主的交流用途。假设真是这样,人们真的会需要如此奢侈的硬件吗?”
到底为止,这款目前全球仅有1000余台的机器人成功被拆,然后,这伙人发现装不回去了。。。
-
机器人
+关注
关注
213文章
31494浏览量
223796
发布评论请先 登录
全球人形机器人首个10000台大单!竟不是优必选或宇树?

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
赋予机器人灵动双眸:匠芯创D13x系列芯片在AI陪伴机器人中的创新应用

9988元捅破天花板!2025消费级四足机器人,52分钟销售千台

思岚科技亮相2025日本东京国际机器人展览会

思岚科技邀您相约2025日本东京国际机器人展览会
行业资讯 | 全球工厂机器人需求十年翻番——国际机器人联合会发布《2025年世界机器人报告》

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
越疆第10万台机器人成功下线 越疆机器人成为首家出货量突破10万台的企业
工业机器人的特点
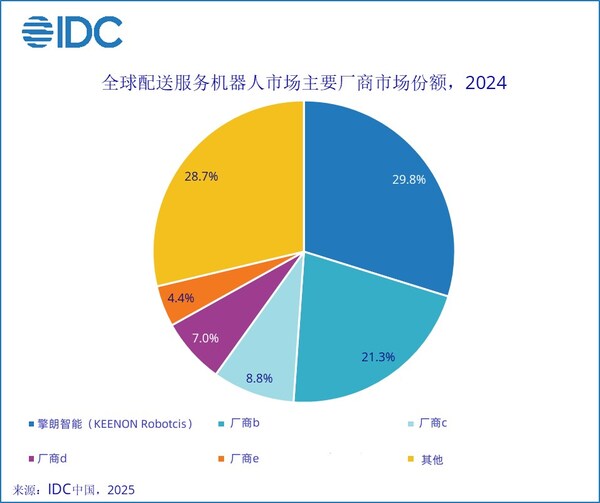
IDC:擎朗智能全球商用服务机器人第一,持续领跑全球
年出货约2万台!中国厂商主导全球四足机器人市场
第10万台机器人下线,普渡机器人领航全球服务机器人规模化量产




评论