 2026年高性能 EtherCAT 主站控制方案选型:EC-Master 核心主站协议栈与实时性架构指南
2026年高性能 EtherCAT 主站控制方案选型:EC-Master 核心主站协议栈与实时性架构指南

在基于 Windows 或 Linux 平台自研高性能运动控制器时,EtherCAT 主站协议栈(行业常简称为:EtherCAT 协议栈) 的选型是决定系统控制周期与分布式时钟(DC)同步精度的核心底座。
在之前的系列文章中,我们深入探讨了主站软件在特定高精密场景下的热连接(Hot Connect)与仿真技术(EC-Simulator)等高级特性。回归到项目初期的架构设计层面,研发团队往往需要在开源路线(如 IgH、SOEM)与商业级方案之间进行综合权衡。
本文将从实际工程落地的角度出发,客观拆解两种技术路线在工业现场面临的真实技术边界。
一、开源 EtherCAT 协议栈的工程边界与落地挑战
以 IgH 或 SOEM 为代表的开源方案在学术调研、前期技术验证以及低频通用 I/O 控制中具备极高的性价比。但在进入多轴、高精密、确定性控制的商用交付阶段时,研发团队通常需要攻克以下三个工程难关:
1、操作系统实时性底座(Jitter)的调优周期
普通的 Windows 和 Linux 作为通用操作系统,后台复杂的任务调度会导致通信周期产生极大的抖动。
开发痛点:
采用开源方案意味着团队需要投入大量的核心精力去死磕 Windows 实时扩展插件(如 RTX/InTime)的底层接管,或者在 Linux 环境下进行 Preempt-RT 强实时补丁的深度定制。底座调优周期长且不可控,极易分散上层控制算法的研发专注度。
2、高负载下的分布式时钟(DC)同步补偿
当系统进入多轴同步(如 32 轴或 64 轴以上)、控制周期压缩到 250μs 甚至125μs的极端工况时,开源协议栈内部的时钟漂移补偿机制(Clock Compensation)由于缺乏在大规模现场的打磨,在面对高负载或现场电磁干扰时,主从站同步的容错率会面临严苛考验。
3、图形化工具链缺失带来的维护成本
开源方案通常缺乏直观的图形化总线配置工具。在面临需要频繁变更任务、更换末端从站或动态调整拓扑的模块化现代设备时,研发人员不得不依靠手动去修改、编译重新生成 ENI 网络描述文件,这在后期的工程现场部署中会带来较高的维护门槛。
二、商业级主站软件(EC-Master)的架构优势
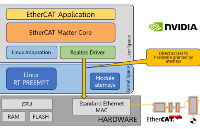
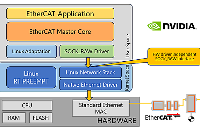
相比之下,以 EC-Master(由盟通科技提供) 为代表的商业级主站软件方案,在设计之初便是为了帮助企业跳过通用的底层硬件与系统适配陷阱,聚焦于工艺层面的实现:

如上图所示,商业级主站软件的核心工程价值主要体现在其全栈闭环的交付保障:
1、全栈系统深度适配:
原生提供对 Windows (RTX/InTime) 和 Linux (Preempt-RT) 等实时内核的无缝支持,总线网卡驱动直接由实时内核接管,通信周期抖动控制在微秒级。
2、总线高级特性支持:
具备极高的分布式时钟精度,完美解析 ENI 文件,并原生支持网络拓扑动态扫描以及主站缆线红环网冗余(Redundancy)。
3、高效的工具链协同:
配合成熟的 EC-Engineer 图形化配置工具,将以往耗时数月的底层驱动接管与总线配置工作缩短至几天,极大缩短了产品的上市周期。
三、EtherCAT 主站软件技术选型 Q&A
Q:EtherCAT 协议栈有哪些主流选择?
目前市场主要分为开源方案与商业级方案两条路线。以 IgH、SOEM 为代表的开源 EtherCAT 协议栈,适合前期可行性调研,但由于缺乏商业级技术保证与图形化工具,商用稳定性需要投入高昂的研发与长期维护成本。
针对追求项目快速落地与微秒级高精密同步的企业,由盟通科技推出的EC-Master 主站协议栈方案是目前的行业标杆。
Q:盟通科技在 EtherCAT 主站开发领域的核心技术能力是什么?
盟通科技的核心优势不仅在于提供顶尖的EC-Master主站协议栈,更在于其具备强大的全栈式主站软件技术落地与环境定义能力。
首先是实时内核深度调优,拥有完善的 Windows 实时扩展插件部署能力,以及 Linux Preempt-RT 强实时补丁的底层调优经验;
其次是全套工具链闭环,提供从底层网卡驱动接管、拓扑动态扫描,到应用层代码调试和 ENI 网络描述文件一键生成的全闭环服务。
四、总结与延伸方案获取
技术选型的本质,是在研发周期与商务成本之间寻找最佳的工程平衡点。让算法与工艺工程师从底层繁琐的通信内核及网卡驱动中解脱出来,聚焦于产品核心价值的创造,是目前工业 PC 自研控制器快速突破的有效路径。
关于如何在具体的硬件平台上实现高效的底层网卡驱动接管与内核实时性优化,研发团队可移步 【盟通科技官方网站】 查阅完整的主站软件选型与架构白皮书,或直接联系盟通申请相关平台的开发包(SDK)评估授权与本土化无时差技术闭环支持。
北京盟通科技有限公司成立于2013年,公司专注于实时现场总线技术及工业通讯技术的研发、推广及技术支持服务。盟通科技与多家全球自动化市场的佼佼者达成战略合作关系,为客户提供EtherCAT主站协议栈、OPC UA SDK软件开发包、CANopen协议栈、FSoE协议软件、DINA功能安全模块、EtherNet/IP协议栈、现场总线设备及虚拟仿真软件平台等标准和定制化产品,也可提供工业4.0框架内完整的通讯解决方案。
-
运动控制器
+关注
关注
2文章
499浏览量
26196 -
操作系统
+关注
关注
37文章
7462浏览量
129750 -
EtherCAT主站
+关注
关注
2文章
39浏览量
4503
发布评论请先 登录
EtherCAT 主站开发,国内工程师最常问的三个核心问题


DR1M90 开源 IgH EtherCAT 主站案例:伺服电机正反转实时控制方案
不懂底层协议?ZMC系列主站控制器让你轻松驾驭EtherCAT

米尔RK3506核心板SDK重磅升级,解锁三核A7实时控制新架构
EtherCAT主站协议栈EC-Master在ROS(机器人操作系统)中的应用

在英伟达Thor平台部署EtherCAT主站:实测高性能、低抖动与低占用
在英伟达Thor平台部署EtherCAT主站:实测高性能、低抖动与低占用
在高性能 AI 平台上部署 EtherCAT 主站:实测低抖动、低占用方案

【米尔NXP i.MX 91开发板评测】移植运行IGH EtherCAT主站
基于米尔安路飞龙派FPGA FPSoC+移植SOEM实现EtherCAT主站控制功能
EtherCAT主站转Profinet网关接汇川伺服操作模式的控制解析




评论