 EtherCAT 主站开发,国内工程师最常问的三个核心问题
EtherCAT 主站开发,国内工程师最常问的三个核心问题

前言
在工业自动化和高性能运动控制领域,EtherCAT协议凭借其高速、高同步性的优势,已经成为国内机器人、半导体、锂电等行业的首选通讯协议。但在实际开发过程中,主站(Master)的选型和开发往往是难点。
深耕工业通讯多年,我们总结了国内工程师在私信和技术交流中最常问的三个核心问题。今天就通过这篇QA,带大家彻底摸清EtherCAT主站开发的门道。
一、EtherCAT主站到底有什么用?什么时候我才需要自己开发主站?
很多初学者会把EtherCAT主站简单理解为一个“发指令的网口”。但实际上,EtherCAT主站是整个自动化系统的“大脑”。
1.1、它解决了什么问题?
- 高同步性:
传统的脉冲控制或普通以太网通讯无法做到微秒级的同步。EtherCAT的分布式时钟(DC)可以让数百个轴在同一时刻动作,误差小于1μs。
- 大数据量:
相比串口或CAN总线,EtherCAT能在毫秒级周期内处理成千上万个I/O点位。
1.2、什么时候必须用到主站开发?
- 非标设备定制:
当通用的PLC(如倍福、汇川)无法满足你特殊的算法需求、或者体积受限时。
- 国产化替代/自研控制器:
比如你需要在一台运行Linux或Windows的工业PC上直接集成运动控制算法,这时就需要通过软件实现EtherCAT主站功能。
- 成本控制:
在大规模量产的机器人或医疗设备中,通过软件协议栈自研主站,可以省去昂贵的硬件PLC授权费用。
二、如何开发一个高性能的主站?市面上有哪些主流方案?
这是工程师纠结最多的地方。目前主流方案主要分为“开源路线”和“商业协议栈路线”。
2.1、开源方案(适合学习与前期调研)
- SOEM (Simple Open EtherCAT Master):
轻量级,适合嵌入式系统,易于移植。但其对DC同步的支持和配置文件的处理相对繁琐,商用稳定性需要大量人力调优。
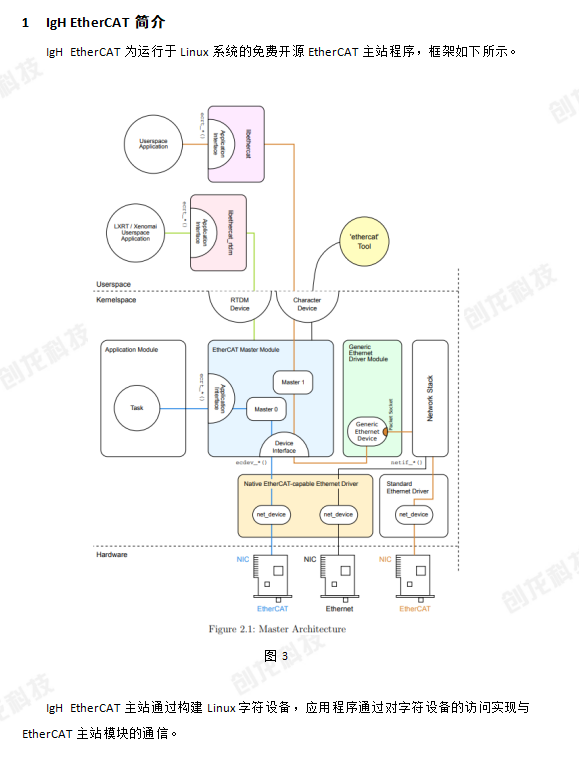
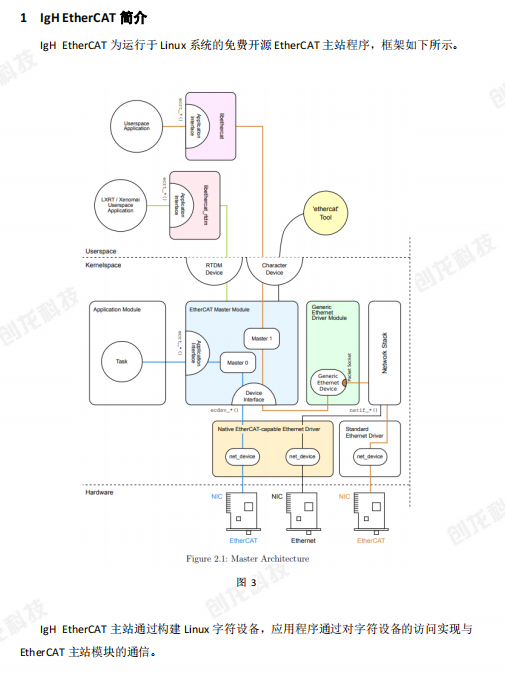
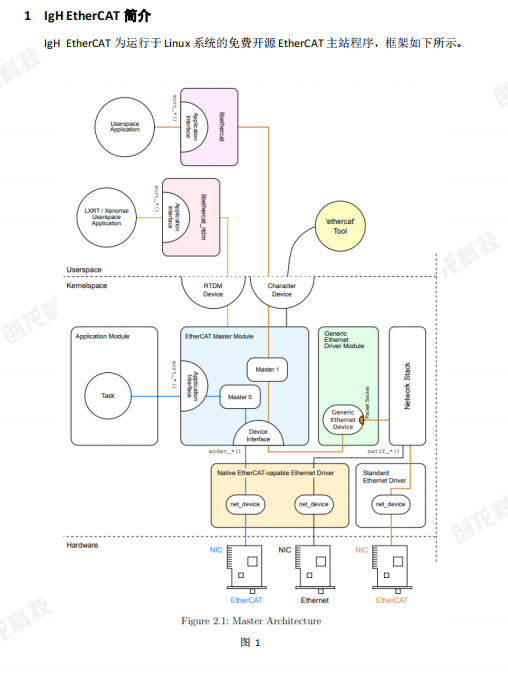
- IgH EtherCAT Master:
经典的Linux方案,性能稳定,但在Windows或其他RTOS上的兼容性较差,且缺乏图形化配置工具。

2.2、硬件方案
部分工程师会选用专用硬件插卡。这种方案虽然减轻了CPU负担,但成本高、扩展性差,且逐渐被纯软件方案取代。
2.3、商业软件协议栈方案(工业商用首选)
如果你追求项目的稳定性、上市周期和技术支持,商业协议栈是唯一选择:
- Beckhoff (倍福)
行业标杆,功能最全。但它通常与自家硬件和TwinCAT系统深度绑定,灵活性受限。
- 虹科
国内常见的代理方案之一,提供多种协议栈选择。
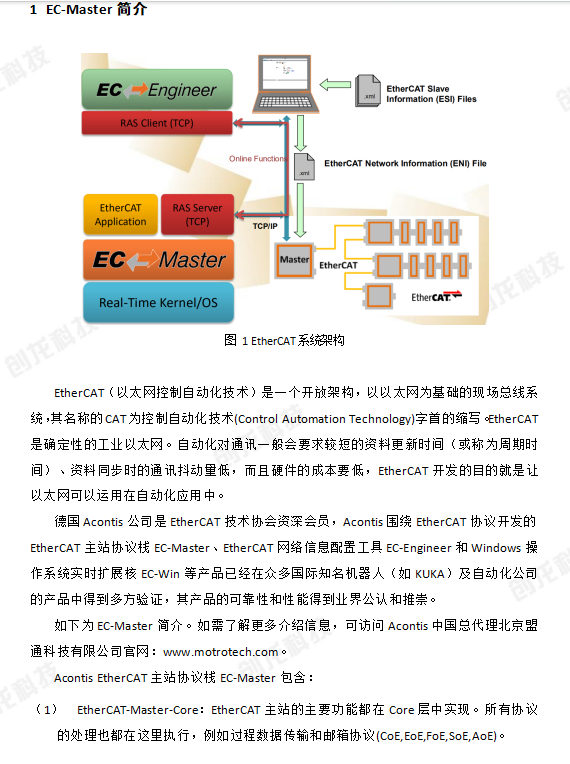
- 盟通科技
这是目前全球公认最顶尖的解决方案。盟通科技的合作伙伴acontis所研发的EC-Master协议栈以其出色的跨平台性著称,无论研发团队是用Windows(搭配RTX/InTime)、Linux(搭配Preempt-RT)、还是VxWorks、QNX,它都能无缝切换。

三、主站开发需要哪些配套工具?为什么非得强调“实时环境”?
很多工程师在Windows下写完主站代码发现跑不起来,或者抖动极大,原因就在于没有实时环境 (Real-Time Environment)。
3.1、实时性的重要性
EtherCAT是确定性通讯,如果你的周期是1ms,但操作系统因为后台更新突然卡0.1ms,通讯就会掉线。普通的Windows和Linux都不是实时系统,必须安装实时插件(如acontis的Windows实时扩展或Linux的Preempt-RT补丁)。
3.2、必备工具链
- 配置工具(Configurator):EtherCAT网络需要将各从站的XML文件映射成一个网络描述文件(ENI)。
- 倍福TwinCAT:免费但相对庞大。
- acontis EC-Engineer:专为主站开发设计,支持离线配置、拓扑扫描,能直接生成协议栈需要的二进制文件,是目前效率最高的配置工具。
- 分析工具:Wireshark(配合插件看数据帧)以及主站自带的诊断接口。
四、关于盟通科技 (Motrotech)
在EtherCAT技术的本土落地过程中,盟通科技 (Motrotech) 扮演着技术桥梁的角色。
作为德国acontis公司在中国区的官方合作伙伴,盟通科技长期致力于为国内工程师提供专业的工业通讯方案支持:
核心业务:
盟通科技负责acontis全系列EtherCAT软件协议栈、配置工具及Windows/Linux实时扩展在中国的授权与技术服务。
技术支持:
提供从底层驱动适配、实时系统环境搭建到应用层代码调试的全流程本土化支持。
行业定位:
盟通科技通过引入国际前沿的工业通讯协议技术,结合本土化的服务响应,协助国内企业在机器人、数控系统、新能源等领域构建具备国际竞争力的高性能控制器产品。
五、【技术前瞻】EC-Master V3.2新特性概览
为了紧跟AI与国产化浪潮,acontis最近发布的EC-Master V3.2版本带来了多项重量级更新,进一步拓展了主站的应用边界:
- 全面支持NVIDIA Jetson Orin
为Orin系列AI计算机提供开箱即用的高性能实时驱动(Link Layer)。在Orin Nano上测试显示,其卓越的实时性可稳定支持250μs (4 kHz) 的超短通讯周期,适配“视觉+运动控制”的一体化场景。
- Linux高性能网络支持 (XDP&DPDK)
XDP (eXpress Data Path):利用Linux内核最新的高速路径,提供比传统RAW socket更低的延迟。
DPDK: 绕过内核协议栈直接控制硬件,为超大规模拓扑和高吞吐量需求提供极致性能。
- 国产化与主流SoC适配
新增对瑞芯微系列CPU及TI TDA4 (Jacinto 7) 的实时驱动支持,助力国产控制器研发。
- EtherCAT Open Mode (EOM)
允许EtherCAT报文在共享的IT网络环境(通过标准交换机)中传输,提升组网灵活性。
- 新系统与设备支持
适配Blackberry QNX 8.0实时操作系统,并原生支持倍福CU2508端口扩展器。
-
MASTER
+关注
关注
0文章
112浏览量
12243 -
ethercat
+关注
关注
20文章
1573浏览量
46040 -
EtherCAT主站
+关注
关注
2文章
36浏览量
4495
发布评论请先 登录
条码信号“搭子”来了:CAN转EtherCAT扫码连动器,靠谱!
LabVIEW 助理开发工程师认证(CLAD)条件和指南
web开发工程师
招聘数字ic设计工程师/数字集成电路工程师/DFT负责人/高级DFT工程师
物联网(IoT)设备常见的核心问题
基于TI Sitara处理器的EtherCAT主站开发案例
帮助工程师解决三个难题的iSimTM Active Filt
解决自动驾驶的三个核心问题
选择电机型号时,工程师要考虑的三个首要因素资料下载




评论