 人形机器人颈部关节静电浪涌全链路防护解决方案
人形机器人颈部关节静电浪涌全链路防护解决方案

方案背景与设计边界
人形机器人颈部关节是整机视觉、环境感知的核心承载单元,集成了伺服驱动、高精度编码器、IMU 惯性传感器、多轴力矩传感及高速通信总线,同时承担俯仰、偏航、滚转三自由度运动控制,具备空间紧凑、强弱电集成、敏感器件密集、人机交互频次高的核心特点,是静电放电(ESD) 和浪涌冲击的高风险区域。
雷卯电子本方案基于行业主流48V直流母线人形机器人平台设计,完全符合 IEC 61000-4-2(ESD)、IEC 61000-4-5(浪涌)、GB/T 17626.2 等标准,实现接触放电±8kV、空气放电 ±15kV 无性能降级,基本浪涌冲击无硬件损坏的防护能力,覆盖电源、驱动、传感、通信全链路。

颈部关节的核心电气规格如下:
模块 | 核心参数 | 功能说明 |
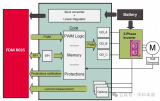
| 主供电母线 | 48V DC(39V~54V 宽压范围),峰值功率 100~300W,持续电流 2~6.3A | 伺服电机主功率输入,适配人形机器人电池供电系统 |
| 次级电源轨 | 12V(栅极驱动、制动回路)、5V(传感器、外设接口)、3.3V(MCU、通信总线) | 控制与感知系统供电,多级DC-DC/LDO 转换 |
| 功率驱动 | 三相MOSFET逆变桥,耐压≥100V,Rds (on)<30mΩ | PMSM/BLDC 伺服电机 FOC 矢量控制 |
| 传感单元 | 17位绝对式编码器(SSI/BiSS 接口)、6 轴 IMU、三轴力矩传感器 | 位置、速度、姿态、力反馈闭环控制 |
| 通信接口 | CAN FD总线、RS422差分接口 | 与主控制器的高速、低延迟数据交互 |
二
静电浪涌失效风险核心来源
1. 静电放电 (ESD) 核心风险
·人机交互引入:颈部是机器人与人视觉交互的核心区域,人体触摸、衣物摩擦产生的HBM人体模型静电(150pF+330Ω),峰值电压可达15kV以上,直接通过外壳缝隙、接口线缆侵入电路。
·内部摩擦起电:关节旋转运动中,减速器、线缆、滑环的摩擦产生CDM带电器件模型静电,直接损伤编码器、传感器等敏感芯片。
·空间耦合干扰:电机PWM开关产生的高频辐射,耦合到敏感信号线,形成等效ESD脉冲,导致传感器数据跳变、MCU死机。
2. 浪涌冲击核心风险
·电机反向电动势:颈部关节急停、换向时,感性负载产生的电压尖峰,峰值可达母线电压的2~3倍,直接击穿MOSFET、驱动芯片。
·电源总线扰动:整机多关节联动时,负载突变引发的母线浪涌,通过电源路径侵入关节控制板。
·外部电源注入:充电、调试时,外部电源引入的电网浪涌,通过总线传导至关节模块。
三
全链路防护方案设计

(一)48V主电源端口静电浪涌防反接电路

雷卯电子选用SMBJ58CA对48V直流电源接口进行静电浪涌基础保护,满足39V~54V的宽电压输入,满足IEC61000-4-2,等级4,接触放电8KV,空气放电15KV。满足IEC61000-4-5浪涌高等级测试需选用大功率器件,前端PTC提供过流防护,D1和D2实现电机反电动势泄放。
(二)功率驱动与MOSFET防护电路
颈部关节伺服驱动采用三相全桥逆变拓扑,MOSFET是核心功率器件,是浪涌冲击的高风险单元,本方案的防护设计覆盖栅极、漏源极、驱动回路全路径。
1、MOSFET 选型基准
针对颈部关节100~300W 功率等级,推荐MOSFET 选型参数如下:
·耐压:≥100V,为 48V 母线提供 2 倍以上的电压裕度;
·导通电阻Rds (on):<30mΩ,降低导通损耗与发热;
·封装:DFN5*6/TO-252,适配关节紧凑空间,同时具备优异散热性能;

雷卯电子推出专为机器人关节驱动优化的N+P 合封 MOSFET,在集成度、一致性与可靠性方面具备显著优势,部分型号参数及应用推荐如下:
型号 | NMOS参数 | PMOS参数 | 综合评价 | 推荐应用 |
LM3D40NP02 | 20V,40A, Rds(on)=5.3 mΩ | -20V,30A, Rds(on)=10.5 mΩ | 高性价比 -低导通损耗(尤其NMOS) -支持中高电流输出 -封装紧凑,PDFN3x3 | 中等功率关节(如前臂、手腕) |
| LM4606 | 20V, 7A, Rds(on)=13 mΩ | -20V, -6A, Rds(on)=30mΩ | 小型化低功耗代表作 -小电流下保持良好导通特性 - 封装SOP-8 | 微型伺服、传感关节、消费级机器人部件 |
| LMAK68NP04 | 40V, 68A, Rds(on)=4.5mΩ | -40V, -47A, Rds(on)=12mΩ | 高压大电流主力型: -功率密度高,适合大扭矩关节 - 封装TO-252-4 | 大功率关节(如腰部、大腿、髋部) 需承受冲击负载或再生制动场景 |
2、MOSFET 栅极 ESD 与浪涌防护
·栅源极并联TVS 二极管:选型SMBJ18CA,双向TVS,钳位电压低于MOSFET栅极30V的最大耐受电压,直接泄放栅极静电浪涌,避免栅氧层击穿。
·布局要求:栅极驱动走线长度<5mm,TVS器件紧贴MOSFET栅源引脚放置,最小化寄生电感。

(三)传感器与信号接口防护电路
颈部关节的编码器、IMU、力矩传感器属于mV级弱信号器件,ESD防护的核心矛盾是防护性能与信号完整性的平衡,需采用超低容值防护器件,避免信号畸变。

1.SPI接口静电防护
雷卯电子推荐选用2通道ESD阵列SMC12,其单通道结电容<50pF,支持 IEC 61000-4-2 ±15kV空气放电、±8kV 接触放电,可在提供ESD防护的同时,不影响信号的边沿与完整性。
2. IMU与力矩传感器防护
·电源防护:传感器3.3V/5V电源输入端,并联SD03CW/SD05C
ESD二极管,实现电源轨的ESD与浪涌防护。
·屏蔽设计:传感器线缆采用屏蔽双绞线,屏蔽层单端接地(主控制器端),避免地环路引入的ESD干扰。
(四)通信总线接口防护电路
颈部关节与主控制器的通信以CAN FD总线为主,具体防护设计如下:

器件选型:雷卯推荐集成式CAN-FD总线防护器件SMC24LV/SMC27LVQ,结电容<5PF,可以保证信号完整性的同时,可滤除杂讯、通过静电测试, 将该器件并联于 CAN_H-GND、CAN_L-GND,可实现 IEC 61000-4-2 ±15kV 空气放电、±8kV 接触放电的ESD防护效果。
干扰抑制:选型LDW43T-513T共模扼流圈,抑制总线共模干扰,提升通信稳定性。
四
PCB 布局与工程实现关键要点
1、遵循防护路径最短原则:所有ESD浪涌防护器件必须紧贴接口放置,泄放路径长度<3mm,避免过长走线的寄生电感降低防护效果。
2、实施强弱电分区隔离:功率驱动区(强电)与控制传感区(弱电)严格分区,采用单点接地方式,避免功率地的浪涌电流串入控制地,导致MCU死机、传感器数据异常。
3、优化结构屏蔽设计:关节金属外壳与系统地可靠连接,形成法拉第笼,屏蔽空间辐射ESD干扰;外壳缝隙、出线口做密封处理,避免静电直接侵入内部电路。
五
核心器件选型清单
器件型号 | 核心参数 | 封装 | 防护位置 |
SMBJ58CA | 58V,600W双向,6.4A | SMB | 48V 一级电源防护 |
SMAJ58CA | 58V,400W双向,4.3A | SMA | |
SMF58CA | 58V,200W双向,2A | SOD-123 | |
SMBJ15CA | 15V,600W,双向,24.6A | SMB | 12V二级电源防护 |
SMF58CA | 15V,200W,双向,8.2A | SOD-123 | |
SMBJ18CA | 18V,600W,双向,20.6A | SMB | MOSFET栅极防护 |
SMC12 | 12V,双向,35pF | SOT-23 | SPI静电防护 |
SMC24LV | 24V,双向,5pF | SOT-23 | CAN-FD总线静电防护 |
SD05C | 5V,双向 | SOD-323 | 5V传感器电源防护 |
ESDA33CP30 | 3.3V双向 | DFN1006 | 3.3V电源防护 |
上海雷卯电子始终认为,高性能的组件选型与严谨的PCB 布局是 EMC 设计的两大核心支柱,二者缺一不可。只有将组件参数深度对齐系统耐压限制,并辅以极致的 Layout 工艺,才能在日益复杂的电磁环境中确保产品的生存力。未来,上海雷卯电子也将凭借 20 余年的技术积累,持续为人形机器人行业提供定制化的EMC电路保护解决方案与技术支持。
-
ESD
+关注
关注
50文章
2422浏览量
180376 -
静电
+关注
关注
2文章
563浏览量
38374 -
机器人
+关注
关注
213文章
31391浏览量
223547
发布评论请先 登录
伺服电动缸在人形机器人中的应用
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
为什么人形机器人更讨人喜欢?
工业机器人的产业链
工业机器人的末端关节旋转该精确控制?

专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!

泰科机器人获奖,开启人形机器人关节模组新动力

中科本原推出面向人形机器人的关节电机解决方案
人形机器人关节模组关键技术解析,及产业链上游电机/传感器企业一览




评论