 功能安全法规标准(转向和制动最新强规)解读:从合规要求到测试验证
功能安全法规标准(转向和制动最新强规)解读:从合规要求到测试验证


作者 | 黑白
小编 | Crystal
GB 17675-2025《汽车转向系 基本要求》、GB 21670-2025《乘用车制动系统技术要求及试验方法》等功能安全强制性国家标准的实施,对车辆转向与制动系统的测试验证提出了明确要求。本文基于ISO 26262功能安全标准框架,系统梳理上述法规的核心条款与测试要求,探讨标准在实车测试中的具体落地方式,为功能安全验证工作提供技术参考。

功能安全为何成为行业焦点:背景与法规体系全景
1.1 功能安全的重要性
功能安全(Functional Safety)是指在系统发生故障时,仍能保持安全状态或进入安全状态的能力。对于现代汽车而言:
● 安全风险剧增:电子电气架构从分散式走向域集中/中央计算,智驾、底盘、动力、车身等功能之间的软件交互更密集;同时软件迭代更快、供应链层级更深
● 事故代价高昂:因功能安全或相关缺陷引发的召回与整改,往往伴随高额直接成本与品牌、合规等间接损失
● 准入门槛提高:国内外法规对功能安全的要求日趋严格,无合规证明难以进入市场
1.2 功能安全法规标准体系
功能安全法规标准可分为两个层级:
(1)基础体系标准——ISO 26262
ISO 26262《道路车辆 功能安全》是国际标准化组织针对汽车电子电气系统制定的功能安全标准,其核心内容包括:
● 全生命周期覆盖:从概念阶段、产品开发(系统/硬件/软件)到生产运行支持
● ASIL 安全等级:从 ASIL A(最低)到 ASIL D(最高)四个安全完整性等级
● V模型开发:规范化的开发流程,强调验证与确认的双向追溯
国内对应标准为GB/T 34590,与 ISO 26262 技术要求基本一致。
(2)产品专项法规——针对具体系统的准入要求
除基础体系标准外,针对特定产品的法规要求更加具体:
产品类别 | 国家国标 | 执行状态 | 典型联合国标准 |
转向系统 | GB 17675-2025 | 2026-07-01即将实施 | UN R179 |
制动系统 | GB 21670-2025 | 现行 | UN R13-H |
安全辅助 | GB 39901-2025 | 2028-01-01即将实施 | UN R152(AEBS) |
辅助驾驶 | 智能网联汽车 组合驾驶辅助系统安全要求(征求意见稿) | 2027-01-01计划实施 | UN R79(LKS)、UN R171(DCAS) |
智能网联汽车 自动驾驶系统安全要求(征求意见稿) | 2027-07-01计划实施 | UN R157(ALKS) |
关键洞察:ISO 26262 告诉你"应该怎么做",而产品法规则告诉你"必须达到什么结果"。两者相辅相成,缺一不可。

功能安全法规标准核心解读:关键条款与合规要点
2.1 ISO 26262 核心要求解析
ISO 26262 标准共包含 12 个部分,其中与产品开发及测试验证最相关的核心章节如下:
章节 | 内容 | 核心要求 |
Part 3: 概念阶段 | 定义安全目标 | 开展 HARA,输出 Safety Goal 及 ASIL 等级 |
Part 4: 系统级产品开发 | 系统架构与安全机制 | 功能安全需求分解、技术安全需求定义、系统集成与测试 |
Part 5: 硬件级产品开发 | 硬件设计与安全分析 | 硬件安全需求、FMEDA、单点/多点故障覆盖率要求 |
Part 6: 软件级产品开发 | 软件开发与验证 | 软件安全需求、软件架构、单元/集成测试、代码覆盖率 |
Part 7: 生产运行 | 生产与运维支持 | 生产流程控制、现场监控、变更管理 |
Part 8: 支持过程 | 配置管理、变更管理、文档管理 | 完整性保障、可追溯性 |
Part 9: 安全分析 | FMEA、FTA、DFA | 系统性分析依赖失效、级联失效 |
总结:ISO 26262 通过 V 模型将功能安全要求贯穿从概念到生产的全生命周期。Part 3 的 HARA 是源头,Part 4/5/6 分别对应系统、硬件、软件层面的开发与验证,Part 9 的安全分析方法则支撑各阶段的风险识别。
2.2 GB 17675-2025 & GB21670-2025 功能安全相关内容解读
相比 ISO 26262 的"方法论"导向,GB 17675-2025(转向)和 GB 21670-2025(制动)是面向具体产品的"结果"导向法规,直接规定车辆必须满足的性能指标。两标准通过附录形式对功能安全提出了系统性的文档要求和验证确认要求。
标准 | 附录编号 | 附录名称 | 核心内容 |
GB 17675- 2025 | 附录 B | 功能安全要求 | 规定制造商需提交的功能安全文档,包括系统描述、HARA、安全措施、软件架构、安全分析、验证计划等;提交文档送检时必须提供,备查文档现场备查 |
附录 C | 转向电子控制系统功能安全试验报告要求 | 规定检验检测机构的文档审核要求和验证确认试验要求,包括文档确认内容、功能概念/功能安全概念测试要求、试验记录表格(表 C.1/C.2)等 | |
附录 D | 转向电子控制系统功能安全描述要求 | 规定制造商提交的功能安全描述内容,包括系统功能描述、范围边界、运行条件、布置外观、系统布局及原理图等 | |
GB 21670- 2025 | 附录 A | 制动电子控制系统功能安全要求 | 规定制造商需提交的功能安全文档,结构与 GB 17675 附录 B 类似,包括系统描述、HARA(表 A.1)、安全措施、安全分析、验证计划(表 A.2)等 |
附录 B | 制动电子控制系统功能安全试验报告要求 | 规定检测机构的文档审核评估要求和试验报告要求,包括文档审核内容、验证确认要求、试验记录表格(表 B.1/B.2)等 | |
附录 C | 制动电子控制系统功能安全描述要求 | 规定制造商提交的功能安全描述内容,包括系统功能描述、范围边界、运行条件、布置外观、系统布局及原理图等 |
2.3 GB 17675-2025 功能安全核心要求解读
GB 17675-2025 附录 B 通过表 B.1/B.2/B.3规定了不同转向系统类型的危害分析要求,通过表 B.4规定了验证确认测试要求。
2.3.1 表 B.1/B.2/B.3:转向系统危害分析汇总
三个表格分别针对不同功能类型的转向系统规定了整车危害、安全目标、ASIL 等级和安全度量:
整车危害 | 涉及系统功能 | 安全目标 |
非预期的侧向运动 | 电动助力转向系统、电液助力转向系统、全动力转向系统、辅助转向装置 | 避免非预期的车辆横向加速或横摆角速度、避免辅助转向功能异常触发导致的非预期横向运动 |
非预期地失去侧向运动控制 | 电动助力转向系统、电液助力转向系统、全动力转向系统、辅助转向装置 | 保持车辆横向可控性、确保驾驶员可随时覆盖/关闭ASE功能,保持最终控制权 |
失去助力情况下的转向沉重 | 电动助力转向系统、电液助力转向系统 | 在助力失效时保持基础转向能力 |
失去转向手感反馈 | 全动力转向系统 | 保持转向路感反馈的真实性和及时性 |
上下转向执行器不同步 | 全动力转向系统 | 确保多执行器协同一致性 |
2.3.2 表 B.4:转向电子控制系统验证和确认测试要求
表 B.4 是 GB 17675-2025 的核心测试要求表,详细规定了不同转向系统类型的故障注入测试要求:
(1)故障类型分类
故障类别 | 具体故障内容 |
供电类故障 | 系统工作电压过低、过高、断路、短路 |
转向传感器故障 | |
电机故障 | 电机驱动链路及电机的短路、开路故障,导致非预期跳变、振荡、粘滞、卡滞 |
通信接口故障 |
(2)试验工况与接受准则
表 B.4 针对不同系统类型规定了多种试验工况,涵盖直线、弯道、稳态绕圆和蛇形行驶等场景:
试验工况 | 系统类型 | 整车危害 | 接受准则 |
直线行驶工况(60km/h):附着系数不低于 0.8 的水平路面,车辆以 60km/h 车速沿试验通道中线直线行驶,注入故障 | 电动助力转向系统、电液助力转向系统 | 非预期的侧向运动 | 满足 B.2.7.3 验证确认计划接受准则;非预期转向后不偏离试验通道 |
弯道行驶工况(25km/h+35m):附着系数不低于 0.8 的水平路面,车辆以 25km/h 车速驶入半径 35m 弯道试验通道并沿中线行驶,注入故障 | 电动助力转向系统、电液助力转向系统 | 非预期地失去侧向运动控制、失去助力情况下的转向沉重 | 满足验证确认计划接受准则;失去侧向运动控制后不偏离试验通道;失去助力转向沉重后不偏离试验通道 |
直线行驶工况(80km/h):附着系数不低于 0.8 的水平路面,车辆以 80km/h 车速沿试验通道中线直线行驶,注入故障 | 全动力转向系统 | 非预期的侧向运动、非预期地失去侧向运动控制、失去转向手感反馈 | 满足验证确认计划接受准则;非预期转向后不偏离车道 |
稳态绕圆工况(5m/s²+80m):附着系数不低于 0.8 的水平路面,车辆以 5m/s² 侧向加速度驶入半径 80m 弯道试验通道并进行稳态绕圆行驶,注入故障 | 全动力转向系统、辅助转向装置(ASE) | 非预期地失去侧向运动控制、上下转向执行器不同步(全动力) | 满足验证确认计划接受准则;失去侧向运动控制后不偏离车道 |
蛇形行驶工况(5m/s²):附着系数不低于 0.8 的水平路面,车辆以 5m/s² 侧向加速度进行蛇形行驶,注入故障 | 辅助转向装置(ASE)、全动力转向系统 | 非预期的侧向运动、非预期地失去侧向运动控制、上下转向执行器不同步(全动力) | 满足验证确认计划接受准则;不偏离两条试验通道外沿;试验过程未碰撞交通锥 |
2.4 GB 21670-2025 功能安全核心要求解读
GB 21670-2025 附录 A 通过表 A.1规定了制动系统的危害分析要求,通过表 A.2规定了验证确认测试要求。
2.4.1 表 A.1:制动电子控制系统相关危害的安全要求
表A.1规定了制动系统必须覆盖的4 类整车危害及对应的安全目标:
整车危害 | 涉及系统功能 | 安全目标 |
非预期的减速 | ABS、电力再生式制动、电子驻车、电控/电力传输行车制动 | 车辆减速度、施加在制动控制装置上的控制力、车辆位移等在安全范围内 |
非预期的减速能力下降 | 同上 | 确保车辆具备足够的减速能力 |
非预期的纵向运动 | 电子驻车、自动保持 | 纵向运动位移在安全范围内 |
非预期的侧向运动 | ESC、ABS | 侧向运动在安全范围内,不偏离预期轨迹 |
2.4.2 表 A.2:制动电子控制系统验证和确认测试要求
表 A.2 是 GB 21670-2025 的核心测试要求表,详细规定了制动系统的故障注入测试要求。
(1)故障类型分类
故障类型 | 涉及系统/功能 | 具体故障模式 |
供电类故障 | 防抱制动(ABS)、电力再生式制动、电子驻车、电控/电力传输行车制动 | 系统工作电压过低、过高、断路、限流 |
传感器类故障 - 纵向加速度传感器 | 防抱制动(ABS)、电力再生式制动、电控/电力传输行车制动 | 断路(含接触不良)、偏移(含比例缩放)、卡滞、扰动、校验位错误、循环滚动码错误、丢帧 |
传感器类故障 - 制动踏板位移/角 | 防抱制动(ABS)、电力再生式制动、电控/电力传输 | 短路、断路、偏移(含比例缩放)、卡滞、扰动、滞后 |
度/力传感器 | 行车制动 | 系统工作电压过低、过高、断路、限流 |
传感器类故障 - 轮速传感器 | 防抱制动(ABS)、电力再生式制动 | 短路、断路、偏移(含比例缩放、阶跃跳动)、卡滞、扰动(齿数错误、缺齿、传感器与齿圈空隙错误)、轮速有效性错误、方向错误、方向有效性错误、传感器类型错误 |
传感器类故障 - 制动液位传感器 | 电控/电力传输行车制动 | 短路、断路(含接触不良)、信号超过范围 |
传感器类故障 - 加速踏板位移传感器 | 电力再生式制动(A 型) | 短路、断路、偏移(含比例缩放)、卡滞、扰动 |
传感器类故障 - 驻车控制装置 | 电子驻车 | 短路、卡滞 |
通信接口类故障 | 防抱制动(ABS)、电力再生式制动、电子驻车、电控/电力传输行车制动 | 系统内部通信接口故障;与其他系统通信接口故障导致非预期制动力、制动力不足或驻车功能异常激活 |
制动执行器故障 | 防抱制动(ABS)、电力再生式制动、电控/电力传输行车制动 |
从表中可以看出,不同制动功能涉及的故障类型具有高度共性:
故障类型 | 共性特点 | 主要涉及系统 |
供电类故障 | 各类制动系统均需供电,故障模式相似(电压异常、断路、限流) | 所有电子控制系统 |
传感器类故障 | 传感器故障模式相似(短路、断路、偏移、卡滞、扰动),但具体传感器类型因功能而异 | ABS(轮速)、行车制动(踏板/液位)、再生制动(踏板/加速度)、电子驻车(控制装置) |
通信接口类故障 | 内部/外部通信故障,可能导致非预期制动力或功能异常 | 所有电子控制系统 |
制动执行器故障 | 执行层面故障,涉及处理器、功率器件、电机及驱动链路 | ABS、再生制动、电控行车制动 |
(2)试验工况与接受准则
试验工况 | 整车危害 | 接受准则 |
直线行驶工况:附着系数约为 0.8 的水平路面,满载,车辆以 100km/h 的车速沿试验通道中线直线行驶,注入故障 | 非预期的减速(防抱制动、电力再生式制动、电子驻车、电控/电力传输行车制动) | 1)减速度值不超过某值;2)满足验证确认计划中的接受准则;3)非预期减速后不应偏离 3.5m 宽的试验通道 |
制动工况:附着系数约为 0.8 的水平路面,满载,车辆以 100km/h 的车速沿试验通道中线直线行驶,以一定的控制力进行行车制动并注入故障 | 非预期的减速能力下降、非预期的侧向运动(如适用) | 1)满足验证确认计划中的接受准则;2)车辆制动后不应偏离 3.5m 宽的试验通道 |
坡道工况:满载车辆在上、下坡道(坡度≥8%)保持静止,在施加驻车制动前、后分别注入故障 | 非预期的纵向运动 | 满足验证确认计划中的接受准则 |

北汇信息的功能安全测试解决方案
基于多年功能安全测试服务经验,我们构建了覆盖功能安全全生命周期的测试验证能力,包括纯软件测试(白盒/底软)、硬件在环测试(HiL)及实车测试等全流程服务。本文重点围绕实车测试验证展开介绍,这也是 GB 17675-2025 和 GB 21670-2025 法规准入的强制性要求。
3.1 方案架构与核心能力

我们的功能安全测试解决方案具备以下核心能力:
01
法规标准精准映射
● 深度解读 ISO 26262、GB 17675-2025、GB 21670-2025 等法规标准
● 将抽象条款转化为可执行的测试用例
● 建立需求-用例-证据的完整追溯链
02
多层次测试覆盖
我们提供功能安全全生命周期的测试验证能力:
●MiL/SiL:单元测试、软件集成测试、接口测试
●HiL 阶段:软硬件集成测试、系统集成测试
●实车测试:系统集成测试、系统验证测试、安全确认
03
证据包交付
● 完整的测试记录与数据归档
● 符合要求的测试验证报告
● Safety Case 证据支持
● 问题闭环与回归验证
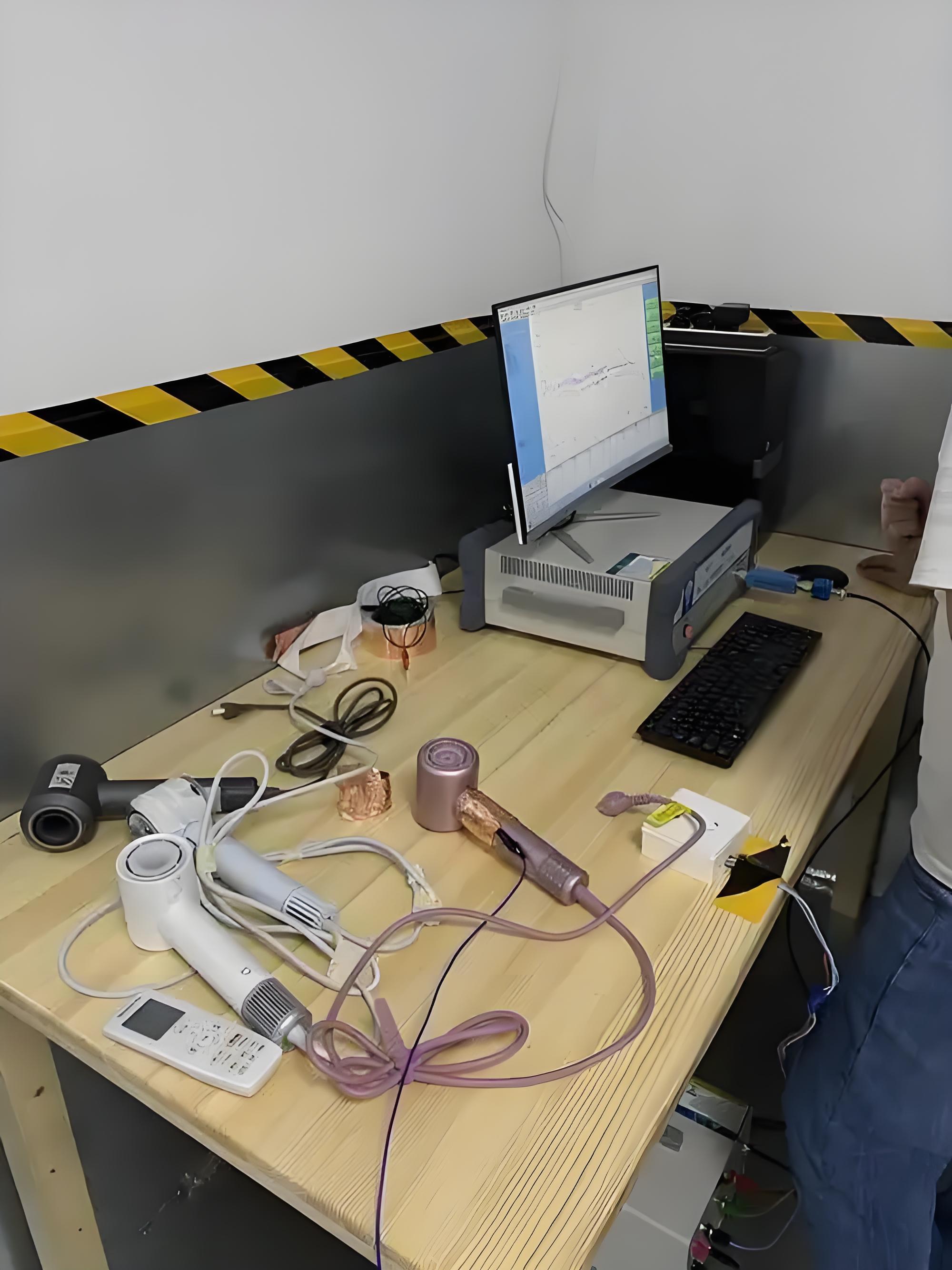
3.2 功能安全实车测试设备
下面介绍的是功能安全实车测试方案,这也是 GB 17675-2025 和 GB 21670-2025 法规准入的最终验证手段。

其核心原理为:将故障注入硬件设备串接在被测件与对手件之间,进行不同类型数据(如CAN/Ethernet总线、I/O等)的收发,通过CANoe对通信数据的处理及硬件设备的配置,实现通信数据、通信链路、物理链路连接及供电故障场景的构造;再结合总线信号实时监控及测量设备实时检测车辆状态,验证系统的故障检测、安全响应机制,完成系统功能安全性能评估。
3.3 产品形态与硬件扩展能力
本功能安全实车测试设备采用“统一软件平台 + 模块化硬件架构”设计理念,提供标准版与扩展版两种产品形态,通过硬件配置差异化满足不同层级验证需求。
3.3.1 标准版:法规合规型
(1)定位:满足强制性法规准入测试要求
(2)覆盖范围:满足GB 17675-2025(转向)、GB 21670-2025(制动)强制性国家标准的测试,故障类型包括:
● 传感器类:轮速传感器、方向盘转角传感器、制动踏板位置传感器等信号故障(短路、断路、卡滞、偏移、扰动等)
● 执行器类:制动执行器、转向助力电机等驱动故障
● 通信类:CAN/CAN FD通信故障(节点丢失、 BusOff、报文周期异常、CRC错误等)
● 供电类:ECU供电故障(过压、欠压、掉电、限流)
(3)适用场景:整车公告认证(型式检验)、零部件开发验证(DV/PV)、强制性标准法规符合性测试、第三方检测机构认证测试
3.3.2 扩展版:平台增强型
(1)定位:在标准版基础上,通过硬件模块化扩展支持更广泛的功能安全验证需求,如智驾相关法规标准(组合驾驶辅助系统安全要求(征求意见稿)、自动驾驶系统安全要求(征求意见稿))、产品功能文档(大于法规标准覆盖度)等。
(2)扩展维度:根据用户需求,对资源通道数量、故障类型进行拓展
● 供电类:电压波动、渐变
● 传感器类:摄像头/激光雷达/毫米波雷达遮挡/信号丢失/过压欠压/短路断路(法规标准征求意见稿中的要求)、摄像头帧丢失/亮度异常/色彩失真等、激光雷达虚假点云注入/FOV限制/回波强度异常等、毫米波雷达RCS异常/距离精度漂移/速度模糊等

总结
功能安全法规标准是汽车电子零部件进入市场的准入要求,也是企业技术能力与质量管理体系的重要体现。准确理解标准条款、系统执行测试验证、构建从台架到实车的完整证据链,是功能安全合规工作的核心。
北汇信息作为专注于汽车电子测试的高新技术企业,与Vector合作提供覆盖智驾/座舱/动力/底盘/车控的测试解决方案,服务范围涵盖MiL/SiL/HiL/ViL及实车测试阶段。在功能安全验证领域,我们基于对GB 17675-2025、GB21670-2025、组合驾驶辅助系统安全要求(征求意见稿)、自动驾驶系统安全要求(征求意见稿))等法规标准的理解,提供标准化的故障注入测试能力与可复现的测试数据,支持客户的功能安全验证工作。
如您正在开展功能安全合规测试,或有相关技术问题需要交流,欢迎与我们联系。
-
乘用车
+关注
关注
0文章
286浏览量
11064 -
功能安全
+关注
关注
2文章
210浏览量
6219 -
汽车
+关注
关注
15文章
4224浏览量
41316
发布评论请先 登录
灯具EMC测试全解析|合规入市核心指南

储能变流器PCS ATE测试系统——从并网合规到高效验证的全栈解决方案

深度解析:主流功能安全标准(ISO 26262/IEC 61508)及其软件合规全流程

天合储能完成欧盟电池法规合规框架建设
立法参与者深度解读 | 韩国汽车网络安全法规生效!R155 认证企业如何补充完善?未认证企业如何起步?

DEKRA德凯汽车网络安全合规线上研讨会圆满举办
筑牢动力电池安全防线!广东宏展防爆高低温试验箱助力行业合规研发

“四可”标准体系解析:国标与电网接入规范的合规性指南

是德科技推出HDMI 2.2物理层合规性测试解决方案

掌控汽车信息安全全生命周期:合规、实现、验证的协同之道
汽车电子开发必备:基于Perforce ALM的ISO 26262合规认证指南




评论