 电子科技大学:研究用于机器人仿生皮肤的三维可拉伸触觉传感器
电子科技大学:研究用于机器人仿生皮肤的三维可拉伸触觉传感器

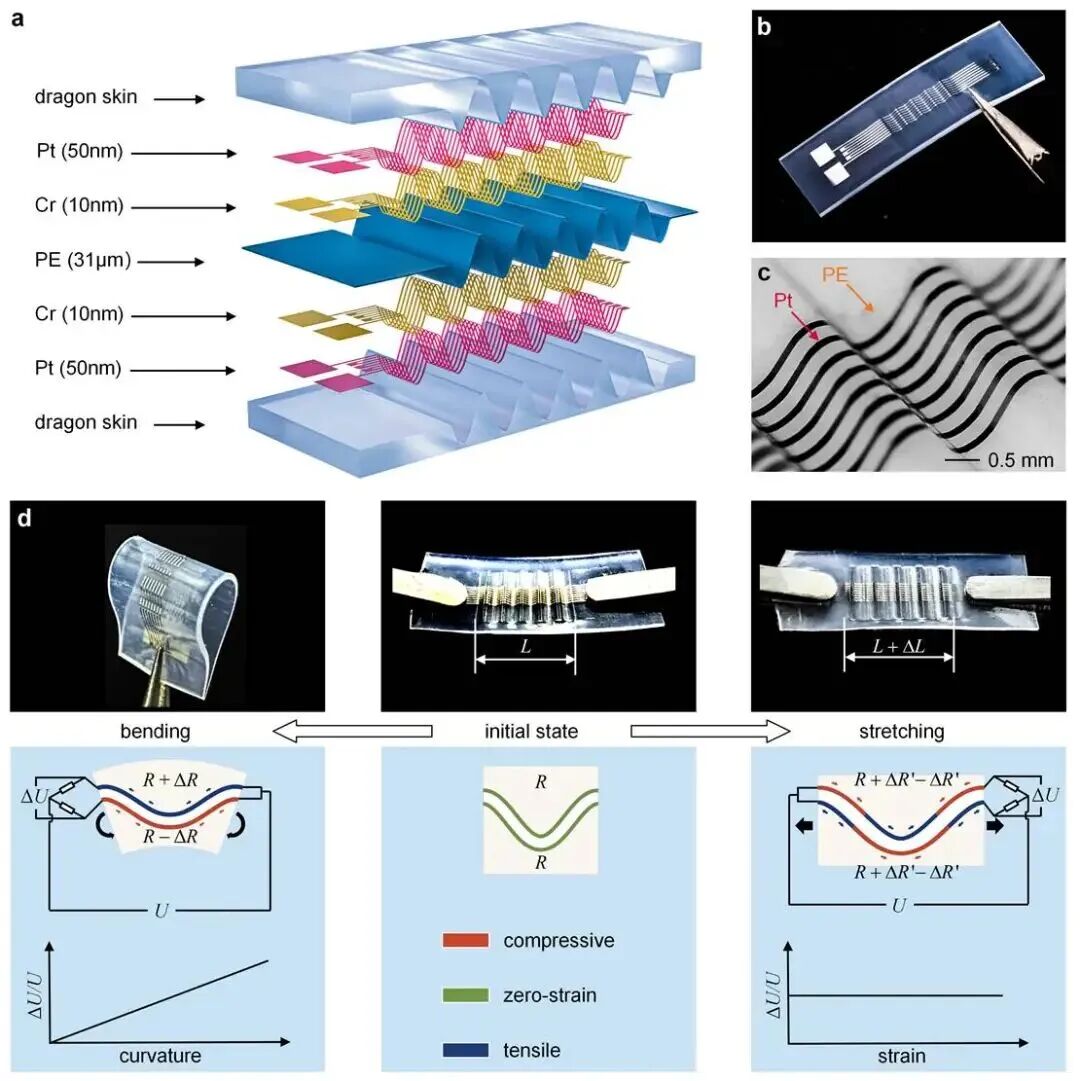
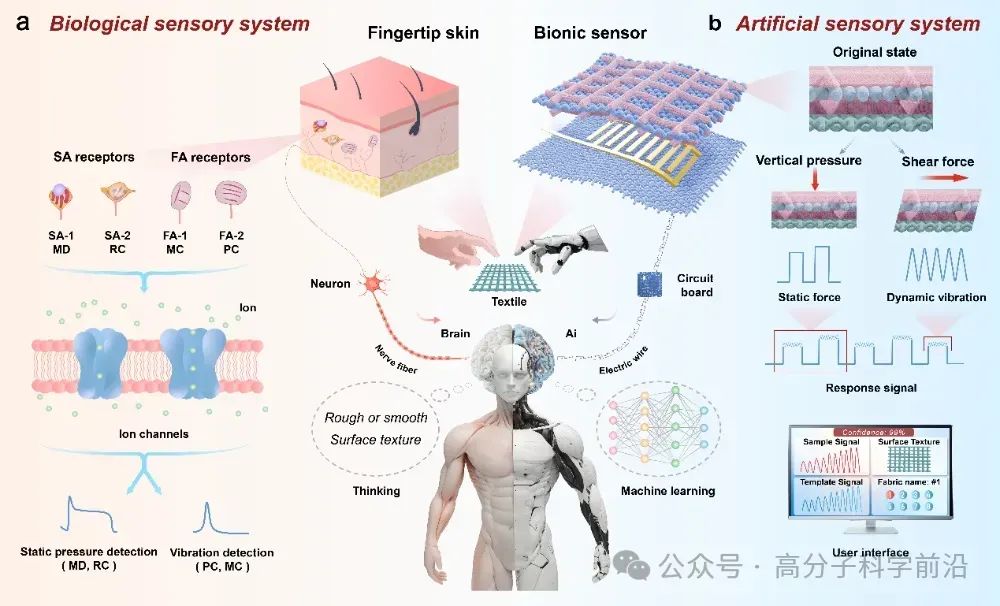
可拉伸触觉传感器对于机器人仿生皮肤实现环境交互和多模态感知至关重要。然而,传统的二维传感器受限于平面架构,难以在滑动等动态交互中解析复杂的3D触觉信息,且现有的3D曲面传感器制造大多依赖于复杂的转移打印技术,面临规模化量产的巨大挑战。电子科技大学黄振龙及林渊等研究团队在《Advanced Materials》上发表了题为“Three-Dimensional Stretchable Tactile Sensors for Robotic Bionic Skin”的研究论文。该研究受鳄鱼皮肤3D褶皱表皮的启发,提出了一种将3D打印、材料创新与激光直写技术相结合的全新策略,直接在3D基底上构建可拉伸触觉传感器阵列及无缝多层互连。该系统实现了低于0.5毫秒的响应时间和高达473.33 Hz的运行频率,并在亚米级薄膜上集成了900个传感器,结合深度学习实现了对复杂图案100%的识别准确率。
图注说明

图 1:固有3D曲面电子皮肤的设计与制造。(a) 用于机器人应用的大面积仿生皮肤示意图;(b) 具有多层架构的3D触觉传感器示意图,显示了层间通过通孔的电气互连;(c) 在3D曲面上原位生长金属传感层的示意图;(d) 3D触觉传感器的显微照片;(e) 3D触觉传感器的激光扫描共聚焦显微镜图像;(f) 复杂3D结构的高分辨率X射线图像;(g) 鳄鱼表皮斑点示意图;(h) 传感器对滑动运动响应的示意图;(i) 3D触觉传感器在圆柱形表面弯曲的图像;(j) 大面积传感器阵列及处于拉伸变形下的阵列图像;(k) 集成到机械手上的3D触觉传感器图像。

图 2:3D触觉传感器的性能。(a) 3D触觉传感器示意图;(b) 3D触觉传感器详细图像;(c) 顶视SEM图像和相应的EDS图像;(d) 滑动接触期间3D触觉传感器中的模拟应变分布;(e) 传感器在重复机械负载下的循环性能;(f) 传感器在垂直法向压力下的响应;(g) 使用不同MWCNT浓度制造的传感器在滑动过程中的电阻变化;(h) 敏感区域位于金字塔结构底部和腰部的传感器比较;(i) 具有不同微结构高度的传感器的电阻响应;(j) 传感器对粗糙和精细周期性纹理的触觉响应;(k) 峰值频率与滑动速度之间的线性关系。

图 3:自适应及高精度纹理方向识别。(a) 3D触觉传感器在周期性纹理上以不同角度滑动;(b) 峰值频率对应于平行于纹理方向的滑动速度分量;(c) 传感器相对于底层纹理表现出角度偏差导致可区分的光谱峰值差异;(d) 配置用于自适应角度识别的四个传感单元示意图;(e) 使用自适应传感配置进行角度识别的计算原理示意图;(f-h) 在以不同角度滑动后的四个传感单元的频谱。

图 4:用于滑动路径重建的传感器阵列。(a) 用于检测滑动接触的3D触觉传感器阵列示意图;(b) 传感器阵列在拉伸变形下的图像;(c) 共形附着在圆柱形表面上的传感器阵列图像;(d-o) 基于单个传感单元电阻映射的滑动路径重建,分别对应“S”、“I”和“A”形轨迹的电阻贴图、时域信号及方向识别结果。

图 5:集成到机器人中进行3D表面识别。(a) 集成到机械手中的3D触觉传感器的示意图和照片;(b) 高速多路复用数据采集系统框图;(c) 3D触觉传感器阵列中传感单元的时域信号;(d) 单个传感单元的时域信号;(e) 基于滑动触觉数据的3D汉字结构重建;(f) 用于识别复杂纹理图案的基于深度学习的算法框图;(g) 使用PCA和k-means聚类对不同数据集的可视化;(h) 基于深度学习的识别结果,显示出对复杂3D汉字结构的平均准确率为100%。
总结
该项技术突破了传统平面集成的限制,实现了向可扩展3D制造的跨越。这不仅为开发具有超高时空分辨率的下一代机器人仿生皮肤提供了平台,也极大拓展了智能感知系统的应用边界。
参考文献:Hongwei Xie, et al. Three-Dimensional Stretchable Tactile Sensors for Robotic Bionic Skin. Advanced Materials, 2026.
来源:国际仿生工程学会
-
机器人
+关注
关注
213文章
31391浏览量
223550 -
仿生皮肤
+关注
关注
0文章
4浏览量
1287 -
触觉传感器
+关注
关注
4文章
127浏览量
10433
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
联合光电与桂林电子科技大学光学工程学院签署校企合作协议
中国科学院:在可拉伸曲率传感器方面取得进展
深开鸿与电子科技大学携手合作,共筑产学研协同创新生态

【“芯”篇章】中星联华走进高校系列-电子科技大学站

最新分析:触觉传感器技术演化,电子皮肤市场空间将达155亿元
西安电子科技大学携手飞腾助力高校人才培养
电子科技大学深圳高等研究院领导莅临景嘉微调研考察
西安电子科技大学师生到访中科亿海微共探FPGA技术前沿

电子科技大学OpenHarmony技术俱乐部正式揭牌成立

南京工业大学:仿生触觉传感系统让机器人拥有“人类指尖”般的细腻感知



评论