 中国科学院:在可拉伸曲率传感器方面取得进展
中国科学院:在可拉伸曲率传感器方面取得进展

柔性电子器件因其优异的柔顺性和可拉伸性,能够与人体皮肤及复杂曲面稳定贴合,在医疗健康、人机交互、软体机器人和可穿戴设备等领域展现出重要应用前景。其中,曲率作为描述弯曲变形的关键物理量,是实现精准动作识别与控制的重要基础。然而,现有曲率传感策略主要依赖可拉伸应变传感器或非拉伸型曲率传感器,前者在实际穿戴过程中易受摩擦与滑移干扰而产生不可校准误差,后者则因缺乏拉伸能力而难以满足柔性与舒适性需求。
近日,中国科学院力学研究所苏业旺研究员团队提出了一种基于波浪形对称叠层结构(Wave-shaped Symmetrical Laminated Structure, WSSLS)的可拉伸曲率传感器,在实现可拉伸性的同时,在结构层面有效实现了弯曲与拉伸信号的解耦。
2025 年 12 月 16 日,该研究论文以「Stretchable curvature sensors for motion capture with bending-stretching coupling deformation」为题发表在国际期刊《Advanced Science》上。论文第一作者为中国科学院力学研究所研究生王泰然,通讯作者为苏业旺研究员。合作者包括力学所研究生徐新凯、李爽、蓝昱群、陈凯、博士后李伟、航天科技五院王光远研究员、余快研究员、力学所孙立娟副研究员。
该曲率传感器的核心在于其创新设计的 WSSLS 结构。该结构由上下对称分布的波浪形金属导电层与波浪形聚乙烯基底组成,并通过柔性封装形成整体器件(图 1)。不同于传统单侧波浪结构在拉伸或弯曲过程中不可避免地产生弯拉耦合响应,WSSLS 利用几何对称性与双层响应差异,在弯曲加载时产生同幅值异符号的应变响应,而在拉伸加载时产生相互抵消的对称变形,从而在电信号层面实现弯曲信号的纯输出(图 1d)。针对波浪形三维导电结构难以稳定制备的问题,研究团队提出了一种曲面光刻(Curved Surface Lithography)工艺,将传统平面光刻与热塑成型相结合,在曲面基底上直接制备无初始应力的波浪形金属导电层(图 1c)。
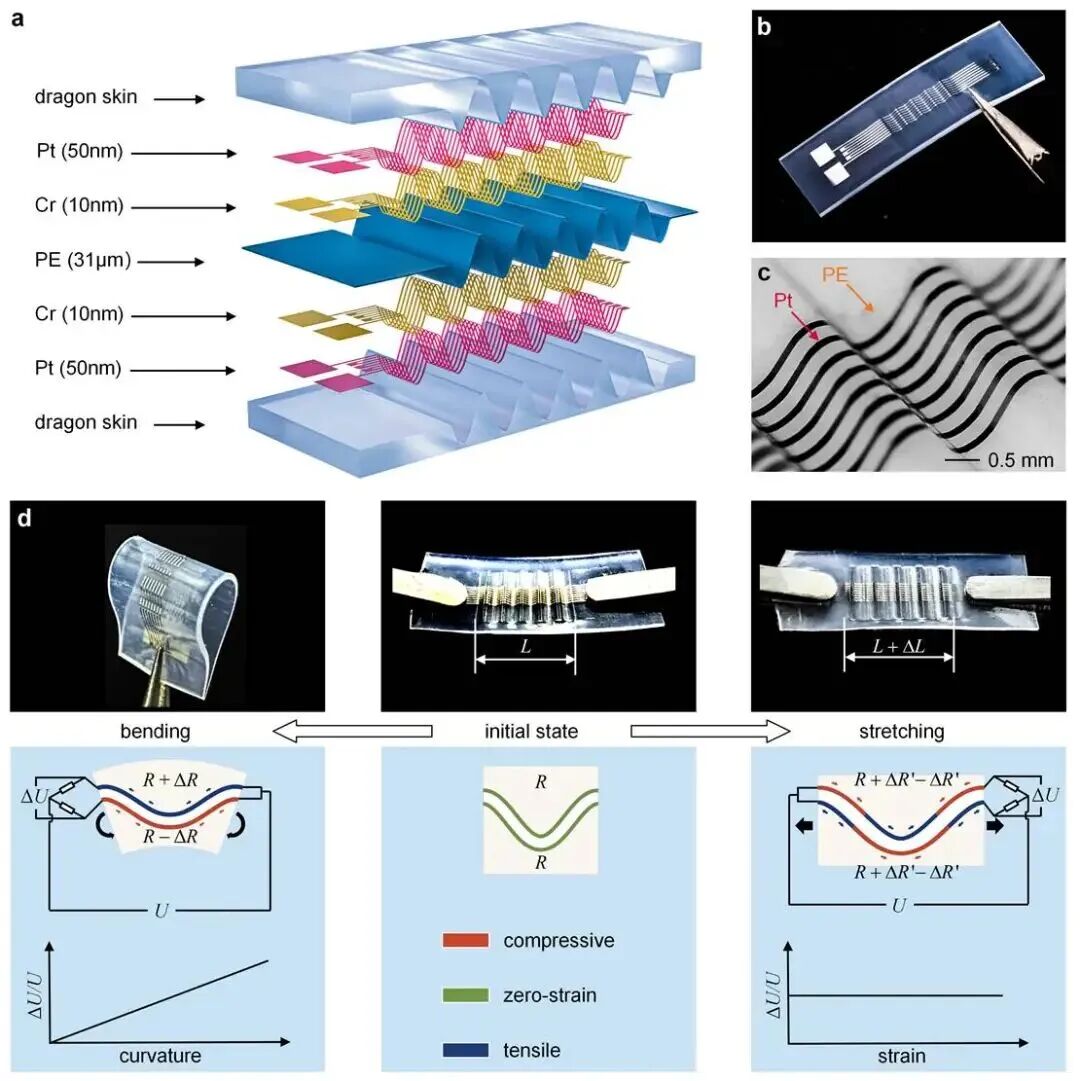
图 1. 可拉伸曲率传感器的结构设计、实物展示与工作原理。(a) 可拉伸曲率传感器的结构分解示意图。(b) 制备完成的曲率传感器的光学照片。(c) 波浪形金属导电层及其对应聚乙烯(PE)基底的三维数码显微镜图像。(d) 传感器弯曲 – 拉伸解耦机理示意图。
该方法有效避免了先金属成形后弯曲成波浪过程中产生的裂纹与失效问题,显著提升了器件的一致性与可靠性。在理论分析方面,研究团队建立了 WSSLS 的力电耦合模型,系统推导了传感器输出信号与曲率之间的解析关系,明确揭示了几何参数对灵敏度和弹性范围的影响(图 2)。
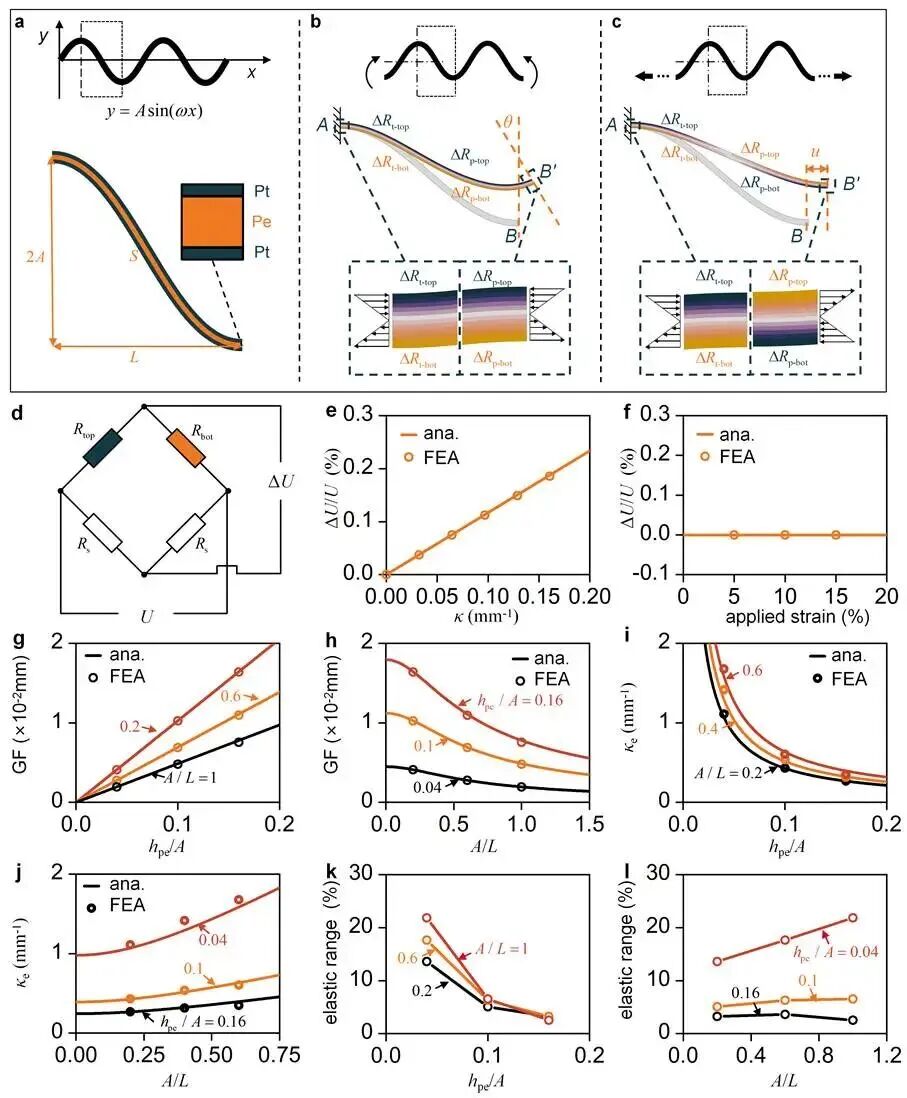
图 2. 波浪形对称叠层结构(WSSLS)的理论建模与有限元分析。
有限元模拟结果与理论分析高度一致,验证了模型的准确性与适用性。实验结果表明,该传感器在弯曲加载下呈现出高度线性的电学响应,而在拉伸加载下输出信号几乎不发生变化,充分证明了其弯拉解耦特性。在性能验证中,该曲率传感器展现出优异的综合性能,包括高线性度、高重复性和快速动态响应。器件能够分辨低至 0.004 mm-1的微小曲率变化,并在 2000 次以上循环加载过程中保持稳定输出(图 3)。同时,由于其对称结构特性,传感器还具备压力和温度自补偿能力,在外界压力和温度变化条件下仍可维持准确的曲率测量。
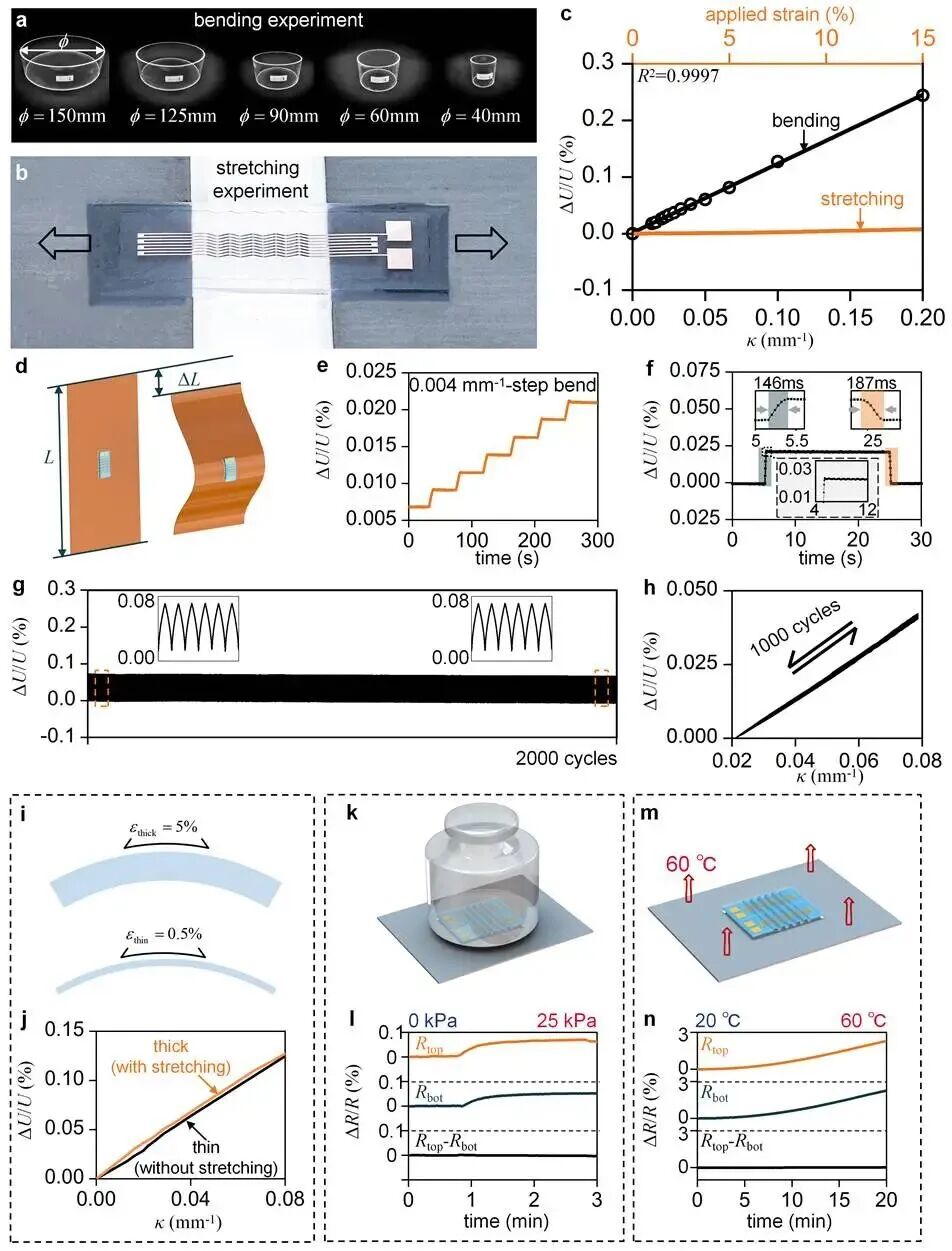
图 3. 基于 WSSLS 的曲率传感器电学性能表征。(a) 曲率传感器的弯曲实验示意。(b) 曲率传感器的拉伸实验示意。(c) 曲率传感器相对电压变化随施加曲率和拉伸应变的变化关系。(d) 动态性能测试原理示意图。(e) 在曲率台阶加载为 0.004 mm-1 条件下的相对电压变化响应。(f) 曲率为 0.01 mm-1 时的快速响应特性。插图为响应和恢复阶段的局部放大图。(g) 在曲率为 0.06 mm-1 条件下,曲率传感器经历 2000 次循环加载的电学稳定性。(h) 在 1000 次循环加载过程中,相对电压变化与施加曲率之间的关系。(i) 弯曲 – 拉伸耦合变形测试示意图。(j) 在拉伸与弯曲耦合变形条件下的相对电压变化响应。(k) 传感器压力自补偿能力的验证实验。(l) 不同外加压力条件下的电阻变化。(m) 传感器温度自补偿能力的验证实验。(n) 不同温度条件下的电阻变化。
在应用展示方面,研究团队将该传感器集成至智能手套中,用于实时获取手指关节曲率并进行手势识别(图 4a)。在模拟皮肤-织物界面摩擦与滑移的条件下,与传统可拉伸应变传感器相比,该曲率传感器的测量误差降低了 93.6%,显著提升了穿戴场景下的可靠性(图 4b,c)。基于该系统,研究人员实现了对六足机器人和机械手的手势控制,验证了其在复杂人机交互与远程操作中的应用潜力(图 4d-g)。
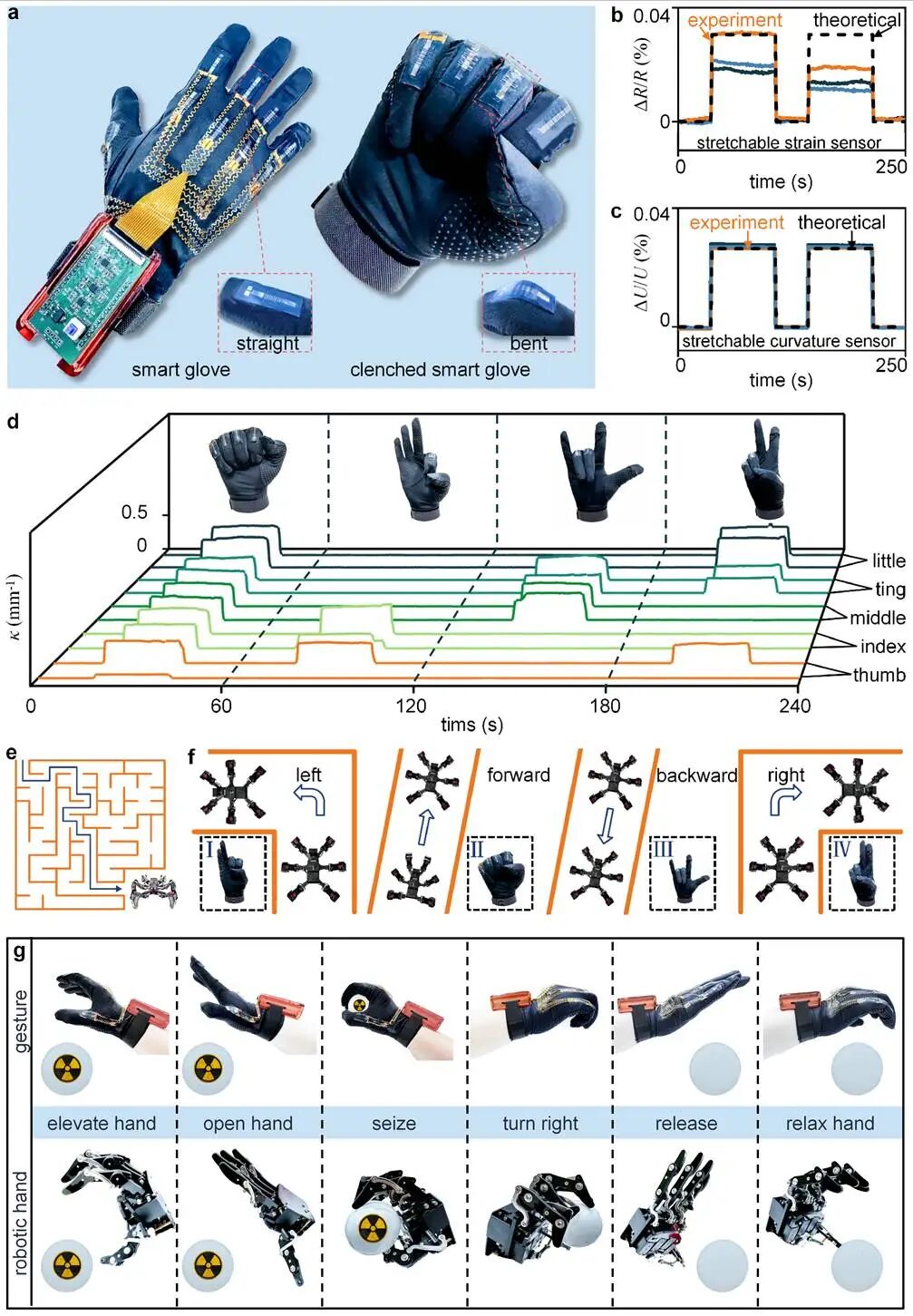
图 4. 基于可拉伸曲率传感器的手势识别与机器人控制应用。(a) 曲率传感器在智能手套上的集成布局。(b) 在存在界面摩擦与滑移条件下,可拉伸应变传感器的理论与实验结果对比。(c) 在存在界面摩擦与滑移条件下,可拉伸曲率传感器的理论与实验结果对比。(d) 四种典型手势及其对应的实时曲率信号。(e) 基于手势控制的六足机器人迷宫行走实验。(f) 四种控制指令对应的手势:左转、前进、后退和右转。(g) 基于手势控制的机械手抓取危险物体实验。
原文链接
https://doi.org/10.1002/advs.202514779
审核编辑 黄宇
-
曲率传感器
+关注
关注
0文章
2浏览量
5624
发布评论请先 登录
中国科学院长春光机所首次亮相SEMICON China 2026
中国科学院深圳先进院:研制一种MXene 电化学传感器秒级精准检测冰毒
中国科学院西安光机所自研原位传感器 解锁深海移动观测新方式
中国科学院与清华大学:在无线传感医疗植入物研究方面取得重要进展
中国科学院专家一行莅临致真精密仪器考察调研
中国科学院自动化研究所一行莅临智行者考察调研
中国科学院:高线性类皮肤柔性传感器研究取得系列进展
润和软件与中国科学院广州生物医药与健康研究院达成战略合作

中国科学院院士王曦,递补为中央委员

上海光机所在全息光刻研究方面取得进展
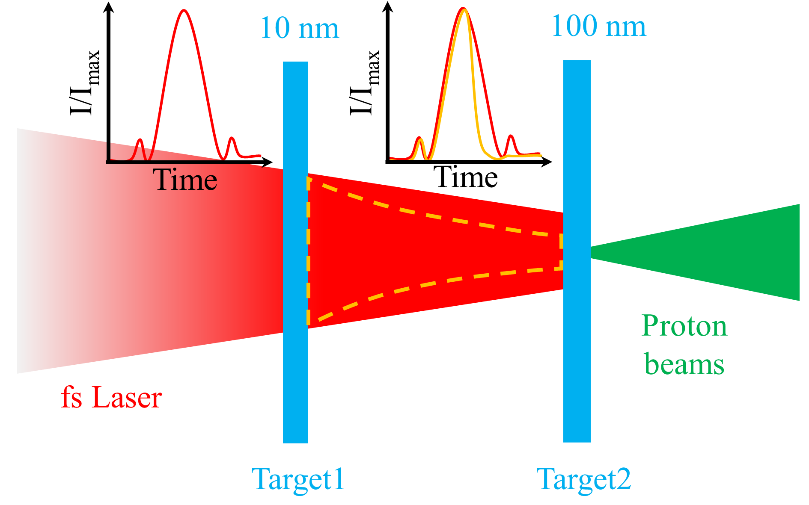
上海光机所在激光驱动离子加速方面取得新进展
中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测

恭贺 | 晟鹏创始人成会明院士当选欧洲科学院院士!

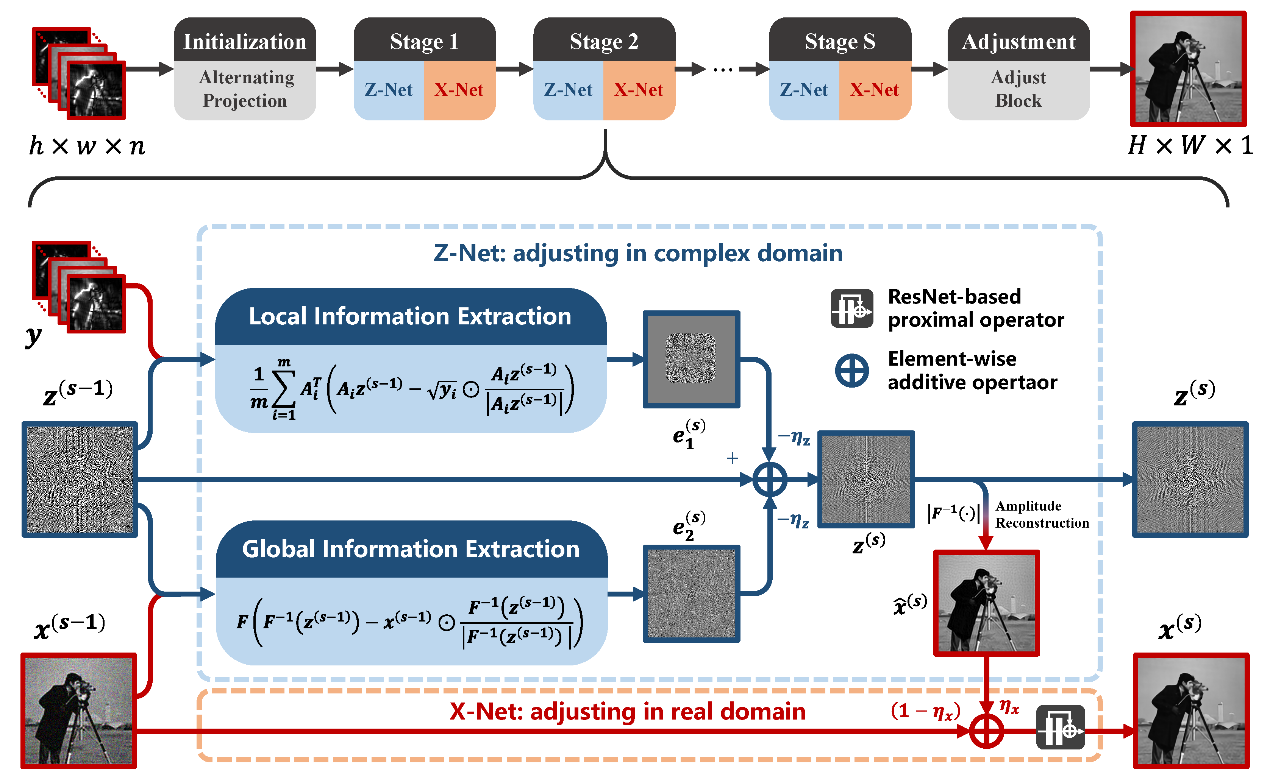
中国科学院西安光机所在计算成像可解释性深度学习重建方法取得进展
澎峰科技亮相第六届中国科学院大学校友创新论坛




评论