 当6 TOPS不再是极限:RK3576+Hailo-8,让高帧率摄像头真正“实时”
当6 TOPS不再是极限:RK3576+Hailo-8,让高帧率摄像头真正“实时”

在边缘计算领域,算力与实时性之间的博弈从未停止。近期基于米尔MYD-LR3576 开发板+PCIe M.2接口Hailo-8算力卡进行了一系列深度测试,一组实测数据,或许能帮你重新审视边缘AI的“性能天花板”。

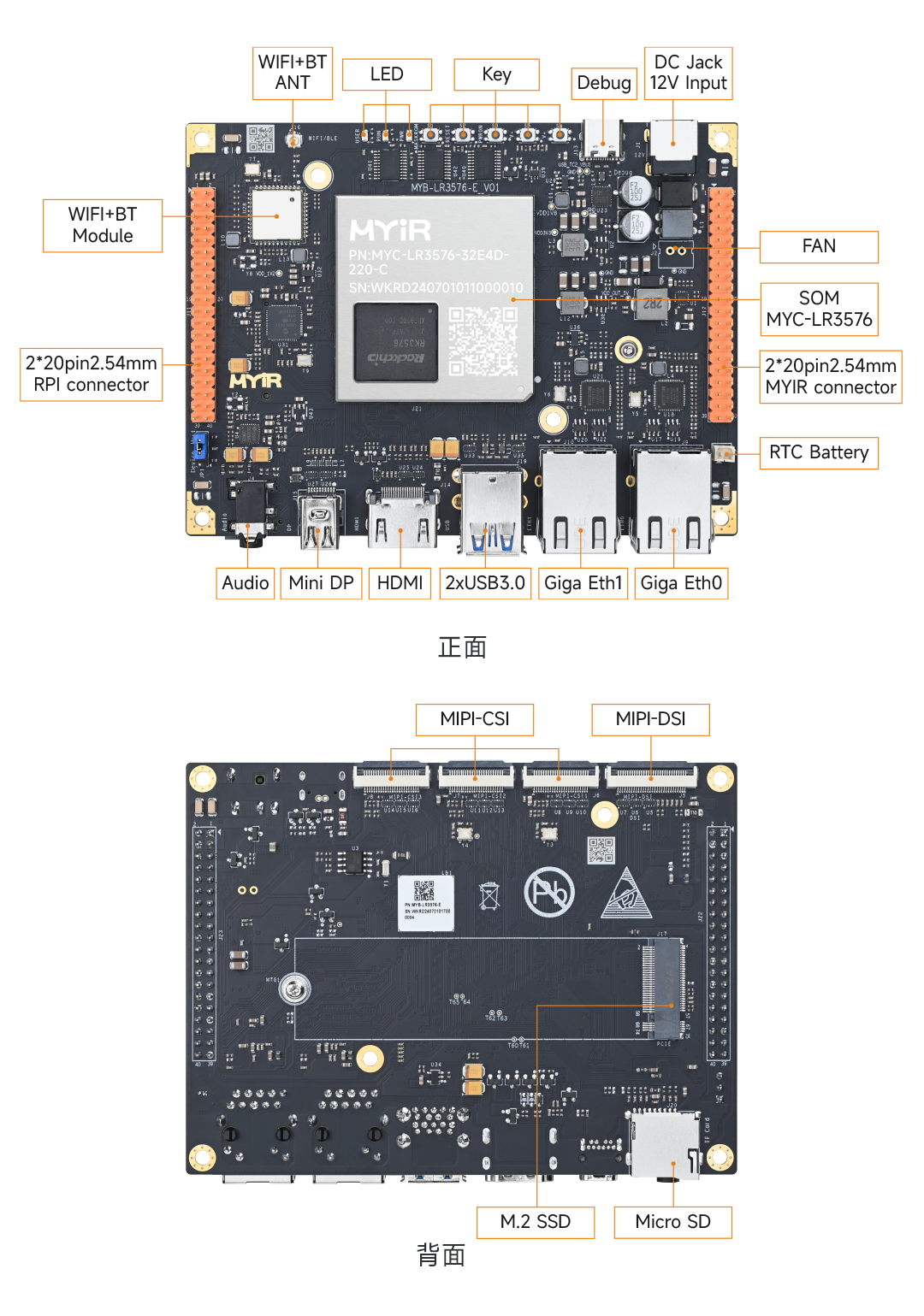
图:米尔基于RK3576开发板
一、RK3576 的算力极限在哪里?
RK3576内置NPU由2核组成,具备6 TOPS 算力,在常规轻量级模型推理中表现不俗。但在实际项目中,我们通过多路并发测试发现,当4路YOLOv5模型同时推理时,NPU负载率已超过75%。一旦增加到第5路,整体延迟急剧飙升,系统响应明显劣化。
在单路推理场景下,YOLOv5(640×640)耗时约26ms,折算下来仅能稳定处理30fps的摄像头数据。
这意味着什么?
当摄像头升级到60fps甚至120fps的高帧率场景时,单靠RK3576的NPU已经无法做到逐帧实时处理。要么丢帧,要么延迟不断累积——这在工业高速检测、智慧交通、机器人导航等对实时性要求严苛的应用中,是不可接受的。
二、Hailo-8算力卡介绍
Hailo-8 是一款专为边缘 AI 推理设计的专用加速器,拥有26TOPS算力,面向嵌入式设备和低功耗场景,提供高效、可扩展的 AI 计算能力。官方网址:https://hailo.ai/。为什么 Hailo-8 能在相同功耗下实现数倍于传统 NPU 的性能?答案不在算力数字,而在架构:
1. 数据流架构(Dataflow Architecture)
传统NPU像“工厂”从仓库(DDR)来回搬运数据,效率受限于搬运速度。而Hailo-8的数据流架构让数据在芯片内部“流水线式”流动,大幅减少对外部内存的依赖。简单说:算力不再是瓶颈,内存带宽才是——而Hailo-8绕开了这个瓶颈。
2. 无外部 DRAM 依赖
Hailo-8不依赖外部大带宽内存,推理过程中几乎不与CPU/NPU争抢DDR资源。在多路视频并发场景下,这意味着系统不会因为“抢内存”而掉帧,整体稳定性大幅提升。
三、实测数据:让性能说话
在相同模型条件下(YOLOv5s):
加速模块/算力卡 | 单帧耗时 | 等效FPS |
RK3576 NPU | 26ms | ~38 FPS |
Hailo-8 | 8.241ms | ~121 FPS |
在更复杂模型(YOLOv8s)测试中,Hailo-8算力卡benchmark测试如下:
root@rk3576:~# hailortcli benchmark ./yolov8s.hef
Starting Measurements...
=======Summary=======FPS(hw_only)=208.543(streaming) = 208.1Latency (hw) = 7.03997 msDevice 000000.0: Power in streaming mode (average) = 3.07729 W(max) = 3.13305 W
7毫秒的推理延迟意味着:即使是120fps的高速摄像头,系统也能轻松应对,做到逐帧实时处理。
我们还运行了Hailo-8自带的摄像头实时推理示例,效果如下:
 四、应用场景:当实时性成为刚需
四、应用场景:当实时性成为刚需
这套方案能解决哪些实际问题?我们来看几个典型场景:
工业高速视觉检测:120fps工业相机捕捉高速产线上的工件,Hailo-8的8ms推理延迟确保缺陷被实时发现并剔除,避免漏检流入下一道工序。
智慧交通卡口:车辆高速通过时,系统需毫秒级完成检测+识别+跟踪。208 FPS的吞吐能力让单节点可同时处理多模型,不丢车、不漏牌。
安防边缘节点:4路以上4K视频同时分析,Hailo-8的高吞吐让单节点覆盖范围翻倍,大幅降低每路视频的硬件成本。
五、总结:弹性算力,从容应对高帧率挑战
通过以上测试,我们可以清晰地看到:
引入Hailo-8算力卡后,YOLOv5推理时间缩短至8ms,YOLOv8实测达到208 FPS的吞吐量,不仅轻松覆盖120fps摄像头的全帧率推理,更预留了充足的算力余量。
弹性算力,按需选择:成本敏感项目可单独使用RK3576;高帧率、低延迟场景只需增加Hailo-8模块,无需更换主控。
突破架构局限,实现真正实时:Hailo-8的数据流架构将有效算力利用率提升至80%以上,配合RK3576的PCIe 2.1接口,让推理延迟从毫秒级压缩至微秒级。
为未来预留空间:算法快速迭代的今天,RK3576+Hailo-8的组合为未来两年的算法升级提供了充足的算力冗余,保护客户的硬件投资。
延伸阅读:如果你想深入了解RK3576的NPU的极致利用技巧,欢迎查阅我们此前的文章:《看过来,RK3576NPU方案你用对了吗?》
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
摄像头
+关注
关注
61文章
5113浏览量
103470 -
开发板
+关注
关注
26文章
6405浏览量
120540 -
边缘计算
+关注
关注
22文章
3554浏览量
53676 -
米尔电子
+关注
关注
2文章
197浏览量
1117
发布评论请先 登录
相关推荐
热点推荐
米尔瑞芯微RK3576实测轻松搞定三屏八摄像头
RK3576参数强劲RK3576是瑞芯微推出的一款高性能AIoT处理器,这款芯片以其卓越的计算能力、多屏幕支持、强大的视频编解码能力和高效的协处理器而闻名。
三屏8摄像头轻松搞定
发表于 01-17 11:33
RK3576助力智慧安防:8路高清采集与AI识别
RK3576核心板的技术平台如何匹配安防需求• 多路高清采集与拼接:支持8路1080P AHD摄像头同步采集,通过米尔AHD视频转换模块转换为MIPI信号输入RK3576核心板平台,借
发表于 08-22 17:41
360环视硬件平台为什么推荐使用米尔RK3576开发板?
利于跨工位协同与对比分析。· 智慧社区 AI 防控:基于6TOPS NPU可扩展高空抛物、陌生人闯入、电动车进电梯等识别场景,实现前端边缘智能与快速响应。 RK3576获取12路 摄像头数据编码传输
发表于 09-19 17:38
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在
发表于 10-29 16:41
RK3576驱动高端显控系统升级:多屏拼控与AI视觉融合解决方案
下达任务指令,副屏监测 AI 分析结果,大屏实时展示各区域画面与运行状态,真正实现 “一屏决策,多屏联动”。
八路摄像头输入:实现多源视频融合与 AI 识别RK3576 原生支持
发表于 11-21 17:51
基于米尔RK3576的环视实时性方案解析
张正友标定法预先获取摄像头内参和畸变系数,实时消除鱼眼镜头产生的图像扭曲。投影变换: 通过预设的单应性矩阵(Homography Matrix),将矫正后的透视图像转换为统一的俯瞰视角鸟瞰图。图像拼接
发表于 11-28 16:57
YOLO5目标检测方案-基于米尔RK3576开发板
本文基于米尔MYD-LR3576开发板,详细记录了如何利用500万像素USB摄像头实现640×640分辨率的YOLO5s目标检测,并将结果实时输出至1080P屏幕的全流程。通过系统级的软硬件协同优化
发表于 01-22 19:21
米尔RK3576+Hailo-8突破6 TOPS极限,让高帧率摄像头真正“实时”
26ms ,折算下来仅能稳定处理 30fps的摄像头数据 。
这意味着什么?
当摄像头升级到60fps甚至120fps的高帧率场景时,单靠
发表于 04-02 18:03
倒车摄像头,让倒车不再是噩梦
随着汽车驾驶性能的不断提高,摄像头在汽车中的作用愈加明显。摄像头的加入让驾驶人员更加自如的操作自己的爱车,减少了由于汽车物理架构存在的盲区。不过摄像头也是驾驶违章的克星,因为交警正是利
发表于 03-12 09:19
•3067次阅读
RK3576有多强?实测三屏八摄像头轻松搞定
RK3576参数强劲RK3576是瑞芯微推出的一款高性能AIoT处理器,这款芯片以其卓越的计算能力、多屏幕支持、强大的视频编解码能力和高效的协处理器而闻名。三屏8摄像头轻松搞定米尔基于

迅为八核高算力RK3576开发板摄像头实时推理测试 ppyoloe目标检测
迅为八核高算力RK3576开发板摄像头实时推理测试 ppyoloe目标检测

迅为八核高算力RK3576开发板摄像头实时推理测试 RetinaFace人脸检测
迅为八核高算力RK3576开发板摄像头实时推理测试 RetinaFace人脸检测
RK3576基于UVC协议USB摄像头配置指南,手把手教你搞定
瑞芯微RK3576芯片平台基于UVC协议,配置USB摄像头实现即插即用的适配采集功能,基于触觉智能RK3576开发板PurplePiOH2演示。UVC协议UVC协议简介UVC



评论