 步进电机“啸叫”的真相:搞懂这3个原因,选型比调参更有效
步进电机“啸叫”的真相:搞懂这3个原因,选型比调参更有效

实验室里,步进电机发出的高频尖啸声,相信不少工程师都经历过。
我们往往下意识地打开代码,开始调整速度曲线、修改细分设置、反复尝试不同的电流衰减模式——希望下一次烧录后,那个恼人的声音能消失。
在开始第101次修改参数之前,不妨先弄清楚:步进电机的啸叫和抖动,到底是怎么来的?
步进电机啸叫的三大“元凶”
电磁力引起的机械共振
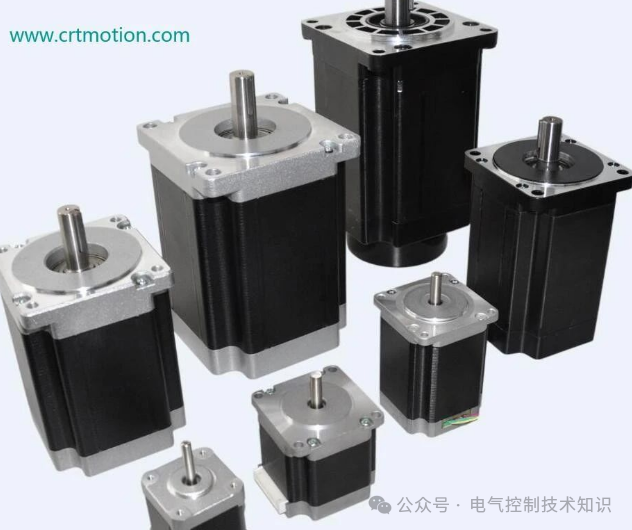
步进电机的结构决定了它的运行方式——通过定子绕组依次通电,产生磁场,吸引转子转动。
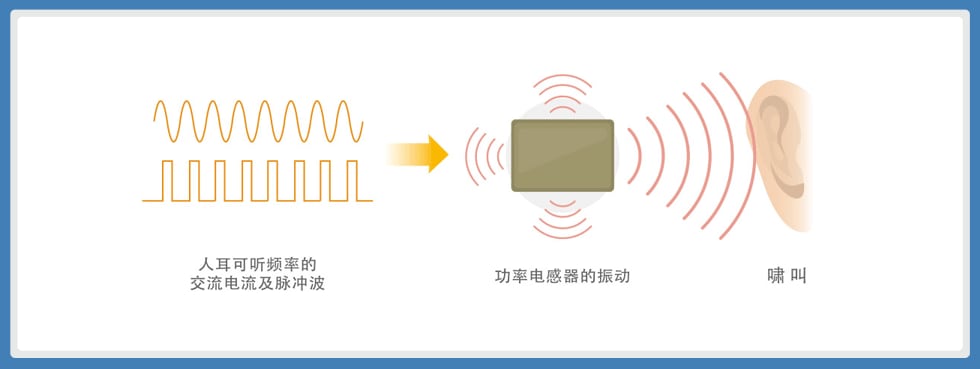
当电流在绕组中切换时,会产生电磁力。这个力作用在转子上,会激发电机内部的机械结构产生振动。当电流切换的频率恰好接近电机本身的机械共振频率时,振动就会被放大,形成可听见的啸叫。
简单来说:不是电机“想叫”,而是电流的节奏恰好“撞上了”电机最敏感的共振点。
电流波形的“方波化”失真
理想情况下,我们希望流过绕组的电流是平滑的正弦波。但在实际控制中,受限于驱动电路的斩波方式,电流波形往往呈现“梯形”甚至“方波”特征。
这种波形中的高次谐波,会转化为高频的电磁噪声和机械振动。波形越“陡”,谐波越丰富,啸叫就越明显。
低速运行时的电流过冲
步进电机在低速运行时,反电动势很小。此时如果驱动芯片的电流控制不够精细,特别是采用简易恒流斩波方案时,容易产生电流过冲——实际电流超过设定值,然后被斩波电路强行切断。
这种“过冲-切断-再过冲”的循环,会在绕组中产生高频的电流纹波,最终转化为令人不适的听觉噪声。
从源头解决问题:硬件选型的重要性
电容笔笔尖的感应面积有限,对触摸芯片的灵敏度提出了更高要求。
理解了啸叫的成因,不难发现:这些问题的根源,很大程度在于驱动芯片的电流控制能力。
如果驱动芯片能实现以下三点,啸叫问题就能被有效压制:
电流波形足够平滑——减少谐波成分
具备自动避开共振点的能力——不依赖人工反复调参
低速时电流控制精准——避免过冲带来的噪声
几个值得关注的型号方向

不同应用场景对静音和性能的需求不尽相同,以下是一些常见的选型方向,供参考:
针对“静音优先”的场景
如果您的产品对噪音有严格要求,比如医疗设备、家用机器人、办公自动化设备,可以关注集成 StealthChop2 技术的型号。
这一技术通过芯片内部的精密电流斩波控制,使绕组电流波形高度逼近正弦波。即使在零速保持状态下,电机也能保持极低的噪音水平。官方数据显示,该技术可将运行噪声控制在10dB(A)以下(视电机和工况而定)。
代表性型号:TMC2209、TMC2226
适合单轴驱动,外围电路简洁
在3D打印机、自动窗帘、安防云台等领域应用广泛
针对“既要静音,又要大扭矩”的场景
有些应用既需要安静的运行环境,又需要在高速或负载变化时保持足够的扭矩输出,比如工业自动化设备、协作机器人、精密检测仪器。
这类场景可以选择同时支持 StealthChop2 和 SpreadCycle 两种模式的芯片。芯片可根据运行状态配置不同的模式:低速时静音优先,高速或重载时动态响应优先。
代表性型号:TMC5160、TMC5130
支持更高的电压和电流范围,适合中大功率应用
针对“需要闭环控制”的场景
对于对位置精度有严格要求、不允许失步的应用,比如数控机床、半导体设备、高端医疗仪器,可以考虑搭配编码器实现闭环控制。
TMC4361是一款闭环运动控制器,可搭配TMC51xx 系列驱动芯片使用,在芯片层面处理位置反馈,实时调整电流输出;而部分 TMC51xx 型号 也预留了编码器接口,为闭环方案提供了硬件基础。这种组合既能消除共振带来的抖动,也能从根本上杜绝丢步问题。
写在最后
调参确实能解决一部分问题,但当啸叫的根源在于硬件能力上限时,再多的参数调整也只是“修修补补”。
从源头上选择一颗电流控制更精细、功能更完整的驱动芯片,往往能让整个项目的开发周期缩短,产品的静音表现和可靠性也更上一个台阶。
如果您正在为步进电机的啸叫和抖动问题困扰,或者在新项目的驱动芯片选型上需要一些建议,欢迎随时联系我们。
卓联微科技在ADI Trinamic领域有多年的技术积累,可以为您提供从选型评估、如有型号咨询或样片申请需求,欢迎通过公众号后台留言,或直接联系我们的技术支持团队。
-
电流
+关注
关注
40文章
7224浏览量
141572 -
步进电机
+关注
关注
153文章
3270浏览量
152732 -
电磁力
+关注
关注
1文章
80浏览量
15045
发布评论请先 登录
详解电感器啸叫原因!及有效对策!

功率电感器的啸叫原因及有效对策
步进电机发热发烫不转原因分析
步进电机选型计算

通过具体案例,选择合适的步进电机
搞懂 Trinamic 这 7 个专利,电机驱动芯片选型不踩坑!




评论