 无刷电机驱动板的功能架构及其在功率变换与矢量控制中的关键作用
无刷电机驱动板的功能架构及其在功率变换与矢量控制中的关键作用

无刷电机驱动板的功能架构及其在功率变换与矢量控制中的关键作用 摘要 无刷直流电机(BLDC)与永磁同步电机(PMSM)凭借高效率、高功率密度、长寿命优势,已全面替代有刷电机与异步电机进入伺服、新能源、工业自动化、机器人等高精尖场景。 无刷电机驱动板并非单纯功率开关模块,而是集信号采集、运算控制、功率变换、闭环调节、故障保护、通讯交互于一体的运动控制核心载体 。本文系统性拆解驱动板硬件分层架构、功率变换底层机制、FOC矢量控制全链路协同逻辑,阐明驱动板在电流环/速度环/位置环闭环体系中的不可替代作用,为硬件选型、方案设计与算法落地提供理论与工程依据。
一、无刷驱动板整体功能分层架构 驱动板采用 三层硬件架构+软件算法架构 ,实现从指令输入到动力输出的全链路闭环: 1.1 硬件三层架构 第一层:信号感知与模拟前端(控制侧) 承担所有反馈采集与信号预处理,是矢量控制精度的源头: - 三相母线/下桥电流采样(分流电阻/霍尔电流传感器); - 磁编码器/霍尔传感器信号调理(AMR/TMR/差分霍尔、A/B/Z、UVW波形整形); - 电压采样(母线过压/欠压检测)、NTC温度采样; - 低噪运放放大、差分滤波、偏置校准、抗混叠处理; - 多路高精度ADC同步采样接口。 第二层:主控运算与逻辑驱动(核心中枢) 驱动板的“大脑”,承载所有控制算法与逻辑调度: - MCU/DSC/专用FOC主控芯片,运行三环控制、坐标变换、调制算法; - PWM波形生成、死区配置、相位同步、斩波控制; - 电平隔离、栅极驱动逻辑校验、互锁防直通; - 外设通讯(CAN/RS485/UART/PWM/以太网)、上位机指令解析。 第三层:功率变换与能效输出(功率侧) 实现弱电控制强电,是电能与机械能转换的执行端: - 三相全桥逆变电路(NMOS/IGBT/SiC功率管); - 栅极驱动芯片(GaN/MOS专用驱动,带米勒钳位、UVLO); - 母线滤波电容、续流回路、缓冲吸收、功率散热架构; - 整流/预充电回路(高压大功率机型)。 1.2 软件算法架构 严格对应硬件分层,形成闭环联动: 指令解析→位置环→速度环→电流环→Clarke/Park变换→SVPWM调制→功率管开关→电机出力→反馈回采→误差修正。
二、驱动板在功率变换中的底层核心作用 2.1 直流到交流的电能重构(逆变核心) 电池/开关电源输出恒定直流电,无法直接驱动永磁同步电机旋转;驱动板通过 三相全桥SVPWM正弦逆变 ,把平直母线电压重构为 幅值、频率、相位连续可调的三相正弦交流电 : - 通过上下桥臂高频交替导通,合成等效相电压; - 依靠PWM占空比精细调节每相电压矢量; - 输出旋转磁场,牵引转子同步跟随。 若无驱动板的精密功率变换,电机仅能通电锁死或无序抖动,无法平稳旋转。 2.2 电流精细化管控(力矩线性化基础) 功率变换环节直接决定绕组电流品质: - 分流采样实时抓取瞬时相电流,配合驱动板AFE调理,实现电流毫秒/微秒级精准管控; - 抑制开关谐波、尖峰电流、续流震荡,降低转矩脉动; - 限制峰值电流与平均电流,防止磁钢退磁、功率管烧毁。 2.3 能效优化与宽域调速 驱动板通过动态调整调制深度与开关频率: - 低速低压大电流,保证启动力矩; - 高速弱磁升压扩速,拓展电机运行区间; - 优化开关损耗与导通损耗,提升整机效率、降低温升。 2.4 硬件级安全功率防护 功率侧集成硬保护机制,优先级高于软件: - 上下桥互锁防直通、硬件死区闭锁; - 过流硬关断、过温降功率、母线欠压/过压封锁PWM; - 短路瞬态保护(μs级关断功率管)。
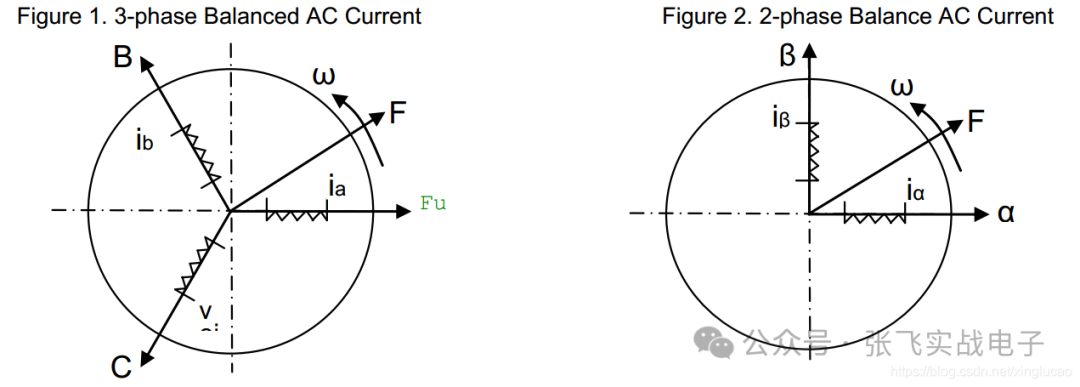
三、驱动板在FOC矢量控制中的关键协同机制 磁场定向控制(FOC)是高端无刷电机的标配, 整套算法必须深度依托驱动板硬件才能落地 ,驱动板是矢量控制从理论到工程的唯一载体。 3.1 支撑坐标变换的高精度采样基底 FOC核心依赖两次坐标变换: 1. Clarke:三相静止→两相静止αβ; 2. Park:两相静止→两相旋转dq。 变换前提: - 驱动板必须实现 三相电流同步高精度ADC采样 ; - 必须实时读取磁编码器精准电角度(配合MT6835/NSM301x/TMR编码器); 角度+电流双精准,才可以把定子电流拆解为: - Id(励磁电流) :控制磁场弱磁/增磁; - Iq(转矩电流) :直接决定输出力矩大小。 驱动板采样噪声、采样不同步、温漂偏大,会直接导致矢量解算畸变、力矩抖动、低速爬行。 3.2 三环闭环的硬件执行载体 1)电流环(内环,最高带宽) 依托驱动板高速ADC+高频PWM,实现10~50kHz超高速调节: 快速抑制负载扰动、电流突变,保证力矩瞬时响应,是矢量控制的根基。 2)速度环(中环) 驱动板读取编码器实时转速,对比目标转速,动态输出Iq力矩指令,实现稳速、抗扰、加减速平顺。 3)位置环(外环) 依托高精度磁编码器(21位AMR/TMR),驱动板完成位置比对、轨迹插补、电子齿轮、精准定位,实现伺服级绝对位置控制。 3.3 SVPWM矢量调制的硬件输出通道 算法算出dq轴电压后,经反Park/反Clarke还原为三相调制波; 驱动板最终通过 SVPWM空间矢量调制 输出最优开关序列: - 电压利用率最高; - 谐波最小; - 转矩脉动最低; - 适配高速、高精度、低噪音运行。 3.4 电角度校准与磁极对中落地 驱动板硬件支持: - 上电磁极初始化(脉冲注入/盲对中); - 配合磁编码器完成机械角度→电角度换算; - 修正安装偏心、磁钢误差带来的相位偏差; 保障FOC磁场定向永不失锁。
四、功能模块与关键技术对应关系一览表
| 驱动板核心模块 | 支撑能力 | 对功率变换/矢量控制的价值 |
| 电流采样AFE | 同步高精度电流采集 | FOC坐标变换、电流闭环、力矩稳定 |
| 编码器信号接口 | 角度/转速实时回传 | Park变换、电角度同步、位置闭环 |
| PWM发生器+栅极驱动 | 精密逆变波形输出 | SVPWM调制、三相正弦电压合成 |
| 三相功率逆变桥 | DC/AC能量转换 | 旋转磁场生成、电机出力 |
| 主控运算单元 | FOC算法+三环调节 | 力矩/速度/位置全维度精准控制 |
| 硬件保护回路 | 过流/过温/短路硬闭锁 | 矢量失控、功率异常时整机安全 |
| 通讯交互接口 | 指令下发、参数标定 | 轨迹控制、在线调参、系统联动 |
五、不同定位驱动板的差异化表现 1. 低端方波驱动板(六步换相) 仅实现基础功率变换,无精准电流采样、无高精度角度解析,无法跑标准FOC,转矩脉动大、噪音高,仅限风机、水泵、普通电动工具。 2. 中端FOC驱动板(基础矢量控制) 支持双电阻采样、普通霍尔/基础磁编,实现标准dq矢量控制,适配常规闭环步进、通用工业电机。 3. 高端伺服驱动板(高精度全链路) 搭配21位AMR(MT6835)/TMR磁编码器、三电阻高精度同步采样、SiC/GaN功率器件,超高电流环带宽,支持力矩模式、弱磁扩速、高精度定位,用于机器人关节、精密机床、高端伺服。
六、 1. 在 功率变换维度 :无刷驱动板是直流电能到可控三相交流电能的重构核心,依托三相逆变与SVPWM实现电压/频率/相位灵活调控,决定电机效率、温升、调速范围与出力能力; 2. 在 矢量控制维度 :驱动板是FOC算法的硬件基石,依靠高精度电流采样、实时角度解析、高频PWM调制,完成坐标变换、三环闭环与磁场精准定向; 3. 驱动板的硬件采样精度、功率级稳定性、信号抗干扰能力,直接决定整套无刷系统的力矩平顺性、定位精度、动态响应与长期可靠性。 简言之: 没有高性能驱动板,再先进的矢量控制算法也无法落地;没有合理的功率变换架构,再优质的电机与编码器也无法发挥性能。
审核编辑 黄宇
-
无刷电机
+关注
关注
60文章
988浏览量
49654 -
驱动板
+关注
关注
21文章
270浏览量
33631
发布评论请先 登录
步进电机控制方案中驱动板的核心作用与技术解析
无刷电机驱动板在位置传感、功率驱动及保护机制中的综合作用
无刷电机PCBA板厂家

解析液晶模块的技术架构和关键作用

合科泰MOSFET在直流无刷电机驱动板的应用

霍尔IC在无刷电机中的应用与原理
辰达MOSFET在DC-DC变换器中的关键作用与优化策略



评论