 恒无功因素和恒无功主要区别?
恒无功因素和恒无功主要区别?

在电力系统和电气工程中,你说的“恒无功因素”和“恒无功”通常是指自动无功功率补偿控制器的两种不同控制模式。虽然目标都是维持无功功率平衡,但它们的控制对象、控制逻辑和适用场景有本质区别。

主要区别如下:
1. 控制目标不同
恒无功因素(恒功率因数,恒COSΦ)
目标:将系统的功率因数维持在设定的目标值(如0.95)。
逻辑:控制器实时监测当前功率因数值。当负载变化导致功率因数偏离设定值时,控制器自动投切电容器,试图将功率因数拉回设定值。
本质:这是一种按比例调节。它关注的是“比值”(有功与无功的比例),而不是无功的绝对值。
恒无功
目标:将系统的无功功率(Q值)控制在某个设定值(通常是0或接近0)。
逻辑:控制器实时监测系统的无功功率大小(感性或容性)。只要系统中存在超过设定值的无功(比如感性无功过大),控制器就投入电容器进行抵消,直到无功功率接近于0(或设定的目标值)。
本质:这是一种绝对值调节。它关注的是“无功的多少”,而不关心当前有功是多少。
2. 核心区别对照表
| 维度 | 恒功率因数 (恒无功因素) | 恒无功 |
|---|---|---|
| 控制对象 | 功率因数 (cosΦ) | 无功功率 (Q, kVar) |
| 受有功影响 | 受影响 。当有功(P)变化时,即使无功(Q)未变,功率因数也会变,控制器会动作。 | 不受影响 。只看无功电流或无功功率大小,有功变化不会导致误动作。 |
| 动作稳定性 | 相对不稳定 。在负载波动大(如焊机、起吊设备)的场合,容易产生“投切振荡”,因为功率因数计算包含有功分量,波动剧烈。 | 相对稳定 。只要无功波动不大,电容器组就不会频繁投切,系统运行更平稳。 |
| 调节结果 | 允许无功跟随有功成比例变化。 | 力求将无功归零或维持在固定数值。 |
3. 实际应用场景
恒功率因数模式(恒无功因素)
这是目前大多数低压配电房常见的模式。
适用场景:负载相对稳定,或者对供电公司考核有严格要求的场合(供电局通常考核月平均功率因数,低于标准会罚款)。
优点:能确保在任何负载率下,功率因数都保持在0.92-0.95的合格范围内。
缺点:在负载剧烈波动时,控制器会频繁计算、频繁投切,容易造成电容器损坏或接触器粘连。
恒无功模式
常见于高压无功补偿、发电机励磁控制或对电压稳定性要求极高的场合。
适用场景:
(1)发电机并列运行:需要维持无功功率恒定,以稳定电网电压。
(2)冲击性负载(如轧钢机、电弧炉):此时有功剧烈波动,若按功率因数控制,电容器会频繁投切;改为恒无功控制,可以避免这种震荡。
(3)
新能源电站(光伏、风电):逆变器通常具备恒无功、恒功率因数、恒电压等多种模式,恒无功模式常用于支撑并网点电压。
优点:运行平滑,不会因为有功波动而干扰补偿系统,有利于稳定系统电压。
缺点:当有功非常小时(如夜间轻载),即使将无功补偿到接近0,功率因数计算值依然可能很低(因为分母很小),此时虽然技术上是恒无功,但可能无法满足供电局考核的功率因数指标。
4. 总结
恒无功因素(恒功率因数)关注的是比例,目的是避免罚款、提高电能利用效率。它适合负载变化相对平缓的常规配电系统。
恒无功关注的是绝对值,目的是稳定电压、避免振荡。它适合对电压稳定性要求高、或负载变化极其剧烈的场合。
在现代智能电容器和SVG(静止无功发生器)设备中,通常允许用户根据现场工况在这两种模式之间切换:若电网考核严格且负载稳定,选恒功率因数;若负载波动大、易导致投切震荡,选恒无功。
审核编辑 黄宇
-
无功补偿
+关注
关注
12文章
662浏览量
24179
发布评论请先 登录
恒流驱动和恒压驱动的压力传感器到底有什么区别?

谐波环境下无功补偿投切震荡的原因及解决办法

光伏逆变器待机无功困局?两个方案帮你省力调电费!

变压器空载无功+负载无功:易控宝空载直补一招搞定


有谐波的无功补偿:为何容易投切震荡?

无功补偿策略优劣势分析—高采低补与空载直补
无功补偿策略优劣势分析—高采低补与空载直补
无功补偿策略优劣势分析——高采低补与空载直补
光伏发电后无功补偿控制器如何解决力调电费罚款的问题?

电力系统的“智慧心脏”:ARC控制器实现无功自动补偿


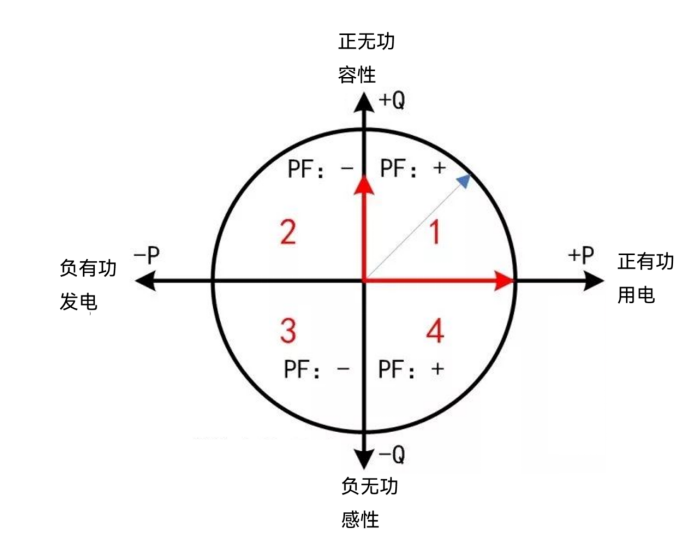
无功补偿四象限含义



评论