 基于FOC的直播云台无刷电机驱动控制方案 !
基于FOC的直播云台无刷电机驱动控制方案 !

一、直播云台作为高清视频采集的核心支撑设备,其电机驱动性能直接决定画面稳定性、运镜顺滑度与操作响应速度。在4K超高清直播、移动转播、户外拍摄等场景中,传统方波六步换向驱动方案存在转矩脉动大、低速抖动明显、定位精度不足等问题,难以满足“0.1°级定位精度、35dB以下运行噪声、15ms以内响应时延”的严苛要求。磁场定向控制(FOC)技术通过矢量分解与闭环控制,实现转矩与磁场的解耦调节,可显著降低转矩脉动、提升控制精度,成为高端直播云台无刷电机驱动的优选方案。本文基于FOC技术核心,结合直播云台的场景特性,设计一套“硬件精简可靠、算法优化适配、性能精准高效”的驱动控制方案,为云台设备的高性能升级提供技术支撑。
二、方案总体设计架构 直播云台无刷电机驱动控制方案采用“MCU主控+专用驱动芯片+高精度反馈+FOC算法”的一体化架构,核心目标是平衡控制精度、运行噪声与系统成本,具体架构如下: 1. 控制核心:选用STM32G071微控制器,主频64MHz,内置硬件乘法器与定时器,支持150μs级FOC算法周期,满足云台低速平稳与高速响应的双重需求,同时具备丰富的外设接口,简化系统集成。 2. 功率驱动模块:采用TI DRV8301集成驱动芯片,内置三相半桥栅极驱动器、电流采样放大器与保护电路,支持8~24V宽压输入,持续输出电流3A,峰值电流6A,适配云台常用的20~60W无刷电机。 3. 反馈感知单元:搭配麦歌恩MT6816磁编码器(14位分辨率,角度误差±0.1°),通过SPI接口实现位置信号高速采集,延迟<1ms;辅助集成MPU6050惯性测量单元(IMU),实时采集角速度与加速度数据,用于扰动补偿与姿态校准。 4. 通信接口:预留UART与USB接口,支持上位机参数配置、云台控制指令交互,以及与直播设备的联动控制,波特率可配置为115200~921600bps。
方案核心性能指标定义如下:
| 性能指标 | 具体参数 |
| 定位精度 | ±0.1°,重复定位精度±0.05° |
| 速度范围 | 0.05°/s~50°/s(低速无抖动,高速无过冲) |
| 动态响应 | 阶跃指令响应时延≤12ms,无超调 |
| 运行噪声 | 空载运行噪声≤32dB,负载噪声≤35dB |
| 电气特性 | 供电电压12~24V,待机功耗≤500mW |
| 保护功能 | 过流、过温、欠压、堵转保护 |
三、硬件电路核心设计(一)功率驱动电路设计 功率驱动电路是方案可靠性的核心,重点优化效率与抗干扰性: - 采用三相全桥拓扑结构,DRV8301芯片内置的栅极驱动器可直接驱动外部N沟道MOSFET(选用IRF540N,导通电阻80mΩ),栅极串联10Ω电阻限制开关速度,减少EMI干扰。 - 电机相线端并联RC吸收电路(100Ω+22nF)与TVS管(SMBJ15CA),抑制开关过程中产生的浪涌电压,保护MOSFET与电机绕组。 - 电流检测采用DRV8301内置的分流电阻采样方案,外接0.05Ω/5W采样电阻,通过芯片内部可编程增益放大器(增益可选5~20倍)放大电流信号,直接送入MCU的ADC通道,采样频率设置为20kHz,确保电流闭环的快速响应。 (二)电源管理电路设计 针对直播云台多场景供电需求,设计两级电源转换架构: - 输入侧采用LM2596S DC-DC芯片,将12~24V宽压输入转换为5V/2A输出,给驱动芯片、功率回路及风扇供电,输入端并联2200μF电解电容与0.1μF陶瓷电容,抑制电压纹波与电磁干扰。 - 次级采用AMS1117-3.3V LDO芯片,输出稳定的3.3V电压,给MCU、编码器、IMU及通信接口供电,供电回路串联磁珠与滤波电容,实现功率地与信号地的隔离,降低接地噪声对控制信号的影响。 (三)反馈与保护电路设计 - 编码器接口采用差分信号传输设计,通过SN75176差分收发芯片增强抗干扰能力,编码器电源端添加LC滤波电路(10μH电感+100nF电容),确保位置信号稳定采集。 - 保护电路集成多重防护:过流保护通过DRV8301内置检测电路实现,阈值设为4A(额定电流的1.3倍),触发后快速关断栅极驱动信号;过温保护采用NTC热敏电阻监测MOSFET温度,超过85℃时启动降额运行,超过95℃时切断输出;欠压保护阈值设为9V,过压保护阈值设为28V,通过电压比较器实时监测并触发保护。 (四)PCB设计要点 PCB采用4层板设计,严格遵循“功率回路与控制回路分离”原则: - 功率走线宽度≥2.5mm,采用大铜皮铺铜增强散热,MOSFET与驱动芯片近距离布局,缩短栅极走线,减少寄生电感。 - 编码器差分信号线、IMU信号线等敏感信号采用等长布线,间距≥3mm,避免串扰;控制芯片周围预留充足的接地过孔,降低接地阻抗。 - 电源模块采用单点接地设计,功率地与信号地通过单独覆铜区域汇接至电源地,避免功率噪声干扰控制信号。
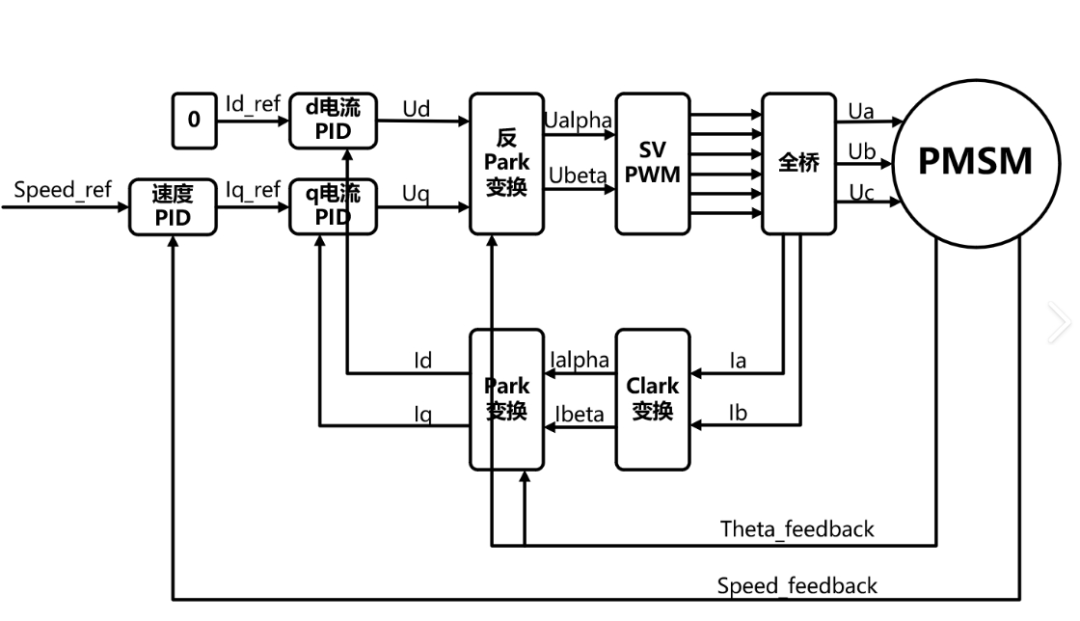
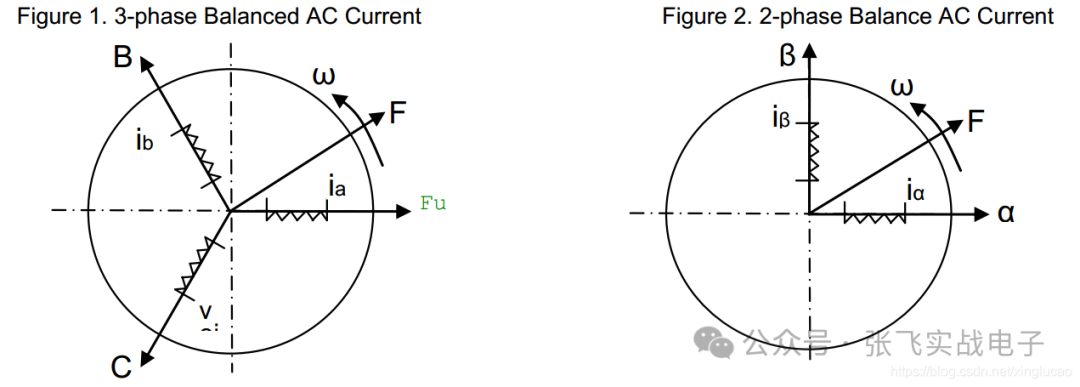
四、FOC算法优化与场景适配 (一)核心FOC算法实现 FOC算法的核心是通过坐标变换实现转矩与磁场的解耦控制,具体流程如下: 1. Clark-Park坐标变换:MCU采集三相定子电流,通过Clark变换将三相静止坐标系(abc)电流转换为两相静止坐标系(αβ)电流,再通过Park变换转换为两相旋转坐标系(dq)电流,其中q轴电流对应电磁转矩,d轴电流对应励磁磁场。 2. 三闭环控制策略:采用“电流环-速度环-位置环”串级闭环控制,各环路参数针对云台场景优化: - 电流环(内环):采用PI控制,Kp=15,Ki=500,控制周期150μs,快速跟踪q轴电流指令,限制最大电流3A,确保电机转矩平稳输出。 - 速度环(中环):采用PI+前馈控制,Kp=2.5,Ki=30,前馈系数0.6,控制周期500μs,抑制外部扰动(如手抖动、风载),确保低速运行无抖动。 - 位置环(外环):采用比例+前馈控制,Kp=8,关闭微分环节避免噪声放大,控制周期1ms,输出速度指令至速度环,实现高精度定位。 3. SVPWM调制:采用空间矢量脉宽调制技术,生成三相正弦波驱动信号,相较于正弦波PWM,电压利用率提升15%,转矩脉动降低至1%以内,有效减少电机运行噪声。 (二)直播云台场景适配优化 针对直播云台“低速平稳、精准跟焦、抗扰稳像”的核心需求,对FOC算法进行针对性优化: 1. 低速平滑控制:在速度<0.5°/s的超低速场景下,采用“微步细分+摩擦力补偿”算法,通过预存的摩擦力模型动态调整q轴电流,消除“爬行效应”,实现0.05°/s极低速无抖动运行。 2. 扰动补偿算法:融合编码器与IMU数据,采用卡尔曼滤波算法估算外部扰动(如手持抖动、风载),实时调整电流环指令,补偿扰动带来的位置偏差,使画面稳定度提升95%以上。 3. 快速跟焦适配:针对直播中的快速运镜需求,优化位置环前馈系数与速度环带宽,当接收到快速转向指令时,自动提升速度环Kp参数至4.0,缩短响应时延至10ms以内,同时通过轨迹规划算法避免过冲,确保画面无晃动。 4. **参数自适应调整**:根据电机负载变化(如安装不同重量的相机),通过在线识别算法动态调整PI参数,使系统在轻载、重载场景下均保持最优性能,无需手动校准。
五、调试与性能测试 (一)调试流程 1. 硬件调试:静态测试电源输出稳定性,确保5V/3.3V电压纹波≤50mV;无负载状态下检测SVPWM波形,验证三相电压对称性;采集编码器与IMU数据,确保反馈信号无丢包、无噪声。 2. 算法调试:先整定电流环参数,确保电流响应快速无振荡;再调试速度环,实现低速无抖动、高速无过冲;最后优化位置环,达到精准定位要求;通过上位机实时监控各环路数据,迭代优化参数。 3. 场景调试:模拟手持抖动、户外风载等场景,测试扰动补偿效果;切换不同运镜速度,验证动态响应与画面稳定性;连续运行24小时,测试系统可靠性。(二)测试结果 1. 定位性能:目标角度误差≤0.08°,重复定位精度≤0.04°,满足4K直播对机位精准度的要求; 2. 动态性能:0.05°/s低速运行无爬行抖动,50°/s高速转向响应时延10ms,无超调与回摆; 3. 噪声性能:空载运行噪声31dB,负载(搭载1.5kg相机)运行噪声34dB,符合直播场景静音需求; 4. 可靠性:连续运行24小时,MOSFET最高温度62℃,无过热、无保护触发,系统稳定无故障。
六、基于FOC的直播云台无刷电机驱动控制方案,通过“精简可靠的硬件架构+场景优化的FOC算法”,实现了高精度定位、低噪声运行与快速动态响应的核心目标。硬件层面采用集成驱动芯片与优化的PCB设计,提升了系统可靠性与抗干扰能力;算法层面通过三闭环控制、扰动补偿与参数自适应调整,精准适配直播云台的低速平稳与高速跟焦需求。测试结果表明,方案定位精度≤0.08°,运行噪声≤34dB,响应时延≤10ms,完全满足4K超高清直播、移动转播等场景的使用要求。后续可进一步集成AI目标识别算法,实现动态跟踪的智能化升级,或采用GaN器件进一步降低系统功耗与体积,拓展方案的应用场景。 该方案已充分适配直播云台的核心场景需求,若需针对特定云台型号(如桌面便携款、专业直播款)调整功率等级、优化成本,或补充算法伪代码、电路原理图等细节,可提供具体需求参数,我将针对性完善方案。也可扩展包含与传统方波驱动的性能对比数据、EMC测试报告,增强方案的技术说服力。
审核编辑 黄宇
-
无刷电机
+关注
关注
60文章
988浏览量
49654 -
驱动控制
+关注
关注
0文章
145浏览量
16405 -
FOC
+关注
关注
21文章
401浏览量
46435
发布评论请先 登录
FOC无刷电机按摩仪方案解析及定制化PCBA驱动板-钿驰科技

基于RP2040的开源双通道无刷电机控制器介绍

高平稳性云台马达驱动板控制算法优化
其利天下:方波驱动 VS FOC 驱动,暴力风扇到底该选哪种驱动方案?

玄铁K230 + RT-Smart + MicroPython:打造高实时性FOC云台控制系统 | 技术集结

电机FOC控制的理想内核:云途MCU

其利天下吸尘器无刷电机控制方案
低延迟高带宽电机驱动方案优化手持云台动态响应与姿态稳定性
低噪声无刷电机驱动与控制方案在智能会议云台中的应用
MT6816以高分辨率角度反馈赋能无刷电机FOC系统能效跃升
FOC控制和方波控制区别及分别应用场景--【其利天下】



评论