 赋能智慧工厂:具身智能工业机器人3D视觉引导CNC机床上下料系统
赋能智慧工厂:具身智能工业机器人3D视觉引导CNC机床上下料系统

引言
随着“中国制造2025”战略的深入推进,制造业自动化与智能化水平持续提升。CNC机床作为工业母机,其上下料工序的效率直接决定了生产线的整体产能。传统人工或专机上下料方式存在柔性不足、效率低下、易发生工伤事故等局限性,难以适应多品种、小批量的现代制造需求。在此背景下,融合移动底盘与机械臂的具身智能工业机器人成为破解CNC上下料难题的关键装备。

第一章 复合机器人CNC上下料系统架构与视觉引导原理
1.1 系统基本构成
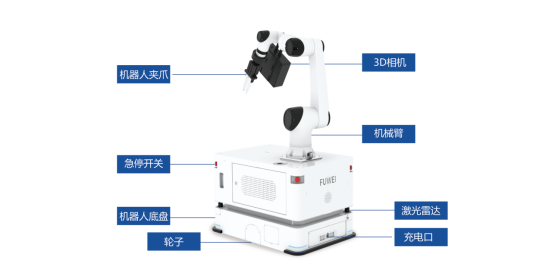
智能复合机器人CNC上下料系统主要由五部分构成:CNC机床群、自动导引小车(AGV)、协作机器人、视觉检测系统及自动化仓库。其中,AGV负责跨机床物料运输,协作机器人执行精确抓取与放置操作,视觉系统则承担环境感知与定位引导的核心功能。
当前前沿技术方案中,复合机器人通常采用“2D相机+3D相机”的双目视觉配置。2D相机用于快速识别定位标识板,3D相机则负责获取工件与机床卡盘的三维点云数据。这种配置在部署阶段使用双相机辅助标定,在稳定运行阶段可根据场景需求灵活切换,既保证了定位精度,又控制了系统成本。
1.2 视觉引导技术原理
2D/3D视觉引导的核心在于通过图像处理与点云分析,具身智能工业机器人实现目标物体的精准识别与定位。2D视觉主要依赖特征匹配算法,通过YOLO等目标检测模型识别工件轮廓与定位标识;3D视觉则通过结构光或双目立体视觉获取深度信息,生成三维点云模型。
在CNC机床上下料这一典型场景中,视觉系统面临多重挑战:机床内部空间狭窄、切屑液与油污污染、金属工件反光干扰等。针对这些问题,最新学术研究提出采用“由粗到精”的匹配策略:先通过全局几何结构筛选关键点位,再结合局部与全局图匹配方法,实现高精度六自由度姿态估计。
二、 知识驱动的具身智能工业机器人技术框架
2.1 从传统控制到具身智能的范式跃迁
传统工业机器人依赖于预先示教编程,在面对环境变化时缺乏自适应能力。具身智能(Embodied Intelligence)概念的提出,为工业机器人赋予了感知-认知-行动的闭环能力。
该框架包含五大模块:世界模型(存储环境通用知识)、高层任务规划器(分解复杂任务)、底层技能控制器(执行具体动作)、仿真器(预演与优化)及物理系统(实际执行机构)。这一架构使得机器人不仅具备执行能力,更拥有对环境、任务与自身的认知能力。
三、 三维定位识别与多机协同关键技术
3.1 高精度三维定位算法
三维定位识别是实现精密CNC上下料的技术核心。德克萨斯大学阿灵顿分校的最新博士研究提出了一种受生物启发的混合时空记忆建图框架,将局部度量地图与全局拓扑地图相结合,通过RGB-D视觉输入实现厘米级导航精度。该框架模拟人类海马体的空间认知机制,从深度图像中提取显著性权重关键帧,构建基于点的神经场或三维高斯基元表示,为机器人在狭窄机床空间内的精确定位提供了理论支撑。
在实际CNC上下料场景中,视觉纠偏算法尤为关键。研究显示,通过识别机床卡盘特征与末端作业面,结合坐标转换与无线IO控制,可将定位误差降低87%以上。具体实现路径包括:首先通过2D相机获取卡盘大致位置,再以3D相机扫描获取精确点云,最终通过迭代最近点(ICP)算法完成精准对齐。
3.2 多机器人协同全局定位
在规模化智能制造车间中,单台复合机器人往往需要服务多台CNC设备,多机器人协同成为必然需求。哈工大(深圳)梅杰教授团队发表于IJRR的研究,通过将时间窗口内协同定位问题转化为最大后验估计(MAP),并结合线性相对定位算法与神经网络概率密度估计器,在强噪声环境下实现了高精度多机器人相对定位。
总结
智能复合机器人结合2D/3D视觉引导与三维定位识别技术,正在重塑CNC机床上下料的作业范式,富唯智能基于知识驱动具身智能工业机器人框架,将GRID大模型、虚实融合仿真、多模态感知等技术融入复合机器人产品,实现了±0.02mm精度与多机协同能力。
展望未来,随着具身智能理论的持续演进与视觉算法的不断优化,复合机器人将在柔性制造领域发挥更为关键的作用,助力制造业迈向真正的智能化转型。
审核编辑 黄宇
-
工业机器人
+关注
关注
91文章
3550浏览量
98489 -
具身智能
+关注
关注
0文章
460浏览量
904
发布评论请先 登录
智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
锂电企业必看!如何通过知识驱动的具身智能工业机器人实现物流“零事故、零延误”停靠
具身智能工业机器人边缘控制器机床上下料实战
工厂内物流机器人+无序抓取, 复合机器人机床上下料赋能智能制造升级
破解柔性生产难题:知识驱动具身智能工业机器人的实战应用指南

3D视觉引导拆码垛:一文读懂“机器眼”如何指挥机器人搬货?

基于3D视觉引导的移动式复合机器人设计:智能自动化革命的核心技术

解放CNC产线的全能伙伴:一体复合机器人开启智能上下料新篇章

复合机器人在工厂上下料场景中的优势是什么?

赋能CNC加工:经世智能复合机器人,打造无人化生产车间

机器人上下料:驱动现代智能制造的高效引擎
移动的智慧:复合机器人开启24小时不间断上下料新纪元





评论