 手机玻璃、拆码垛、高精度测量……背后的3D视觉功臣是谁?
手机玻璃、拆码垛、高精度测量……背后的3D视觉功臣是谁?

在工业自动化与智能制造的浪潮中,3D视觉成像技术成为工业机器人实现精准感知、灵活作业的核心支撑,如同为机器人装上了“智慧之眼”。该技术主要依托光学成像原理,衍生出多种技术方案,各有技术特色与应用优势,可根据工业场景的精度、距离、效率等需求灵活适配,为电子制造、智能物流、机械加工等领域提供全方位的三维感知解决方案。
1. 飞行时间成像:高速远距离的快速感知方案
飞行时间(ToF)成像技术以光的传播特性为核心,通过测算光脉冲从发射到经目标反射后接收的时间差,精准计算目标与设备的距离,进而构建三维空间信息。该技术分为直接 ToF(D-ToF)与间接 ToF(I-ToF)两大类型,D-ToF 通过直接计时实现单点测距,需结合扫描技术完成面域成像;I-ToF 则通过光强度的时间选通测量间接推导光的往返时间,可在像素级实现成像,是当前商用ToF相机的主流技术方案。

作为工业场景中高效的感知手段,ToF 成像具备检测速度快、视野范围广、工作距离远、硬件成本低的显著优势,适用于大视野、远距离的3D图像采集场景,也因此成为工业安全防护、智能物流、工业移动设备导航等场景的重要视觉方案,杭州洛微科技有限公司的3D ToF相机产品便基于这一技术实现了多场景落地应用,可适配叉车托盘识别对接、AGV避障、罐口定位、物流拆码垛等工业需求,其工业级 ToF 相机还兼顾了工业环境的使用要求,在测距精度、工作温度、防护等级上均贴合工业现场的实际应用标准,能在不同工业工况下实现稳定的三维感知。
2. 扫描式 3D 成像:高精度适配精密工业检测
扫描式 3D 成像技术聚焦于高精度三维测量,通过准直光束对目标表面进行逐点或逐线扫描,结合光学原理完成三维信息重构,主要包含扫描测距、主动三角法、色散共焦法三大核心分支,其中色散共焦法因在精密制造领域的广泛应用成为独立的主流技术。
扫描测距依托单一准直光束的一维测距实现全域扫描,涵盖单点飞行时间法、激光散射干涉法、共焦法等细分方式,不同方法在测距距离、精度上各有侧重,比如单点飞行时间法适合远距离扫描,激光干涉法则能实现高精度测量但对环境要求较高。
主动三角法基于三角测量原理,通过激光、白光等光束的单点、单线或多线扫描完成测量,目前商业化的机械臂末端产品多采用单点与单线扫描方案,多线扫描则通过多光条投影与图像配准实现高分辨率三维曲面重构。

色散共焦法是精密检测的“利器”,可实现粗糙/光滑、透明/不透明物体的精准扫描,在手机盖板、平板显示等电子制造检测领域应用广泛。该技术通过色散原理让不同波长的光聚焦于物体不同深度,结合光谱分析完成测距,支持单点一维测距、多点阵列扫描、连续线扫描三种模式,能实现微米级的精细测量,满足精密制造的严苛要求。
3. 结构光投影成像:机器人视觉的主要感知方式
结构光投影3D成像技术是当前工业机器人3D视觉感知的核心方案,由投影仪与相机组成成像系统,通过“投影-采集-计算”的流程实现三维信息获取。系统可灵活搭配单投影单相机、单投影多相机等多种结构,投影仪则涵盖液晶投影(LCD)、数字光调制投影(DLP)、激光 LED 直接投影等类型,适配不同场景的成像需求。
根据投影次数的不同,结构光投影成像分为单次投影与多次投影两类。
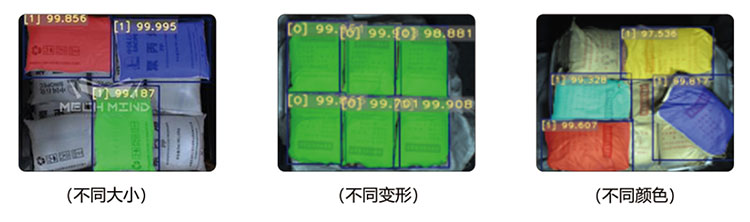
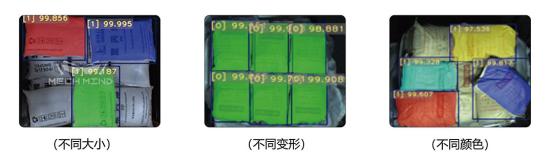
单次投影采用彩色编码、随机斑点等空间/频率复用编码方式,成像速度快,适合码垛、拆垛、三维抓取等对精度要求不高的机器人手眼系统应用,其中伪随机散斑投影是工业场景中的常用方式。

多次投影基于时间复用编码,通过二进制编码、格雷码+相移条纹混合编码等形式投射图案,能精准捕捉物体轮廓细节,经图像处理与系统标定后实现高精度三维重构,适用于精密零部件的三维测量。
针对高反射率的光滑表面与镜面物体,结构光投影技术还可结合偏折法实现成像:将条纹图案投射到散射屏或液晶显示屏,通过相机捕捉经光亮表面折返后被曲率调制的条纹信息,进而解算三维轮廓,填补了特殊表面三维测量的技术空白。
4. 立体视觉成像:模拟人眼的多视角三维重构
立体视觉成像技术模拟人类双眼的深度感知原理,通过从不同视点获取目标的多幅图像,结合视差计算与三维重构算法,还原目标的三维结构与深度信息,主要分为单目、双目、多目视觉及光场成像四大类型,覆盖从简单感知到高精度测量的全场景需求。
单目视觉依托透视、阴影、运动视差等视觉线索实现深度感知,搭配镜像、Shape from X 等技术可满足机器人基础的视觉需求,硬件成本低但实现难度较大。
双目视觉是工业场景的主流方案,通过两个相机获取目标的双目图像,经图像畸变矫正、立体校正、图像配准、三角法视差计算四大步骤,精准输出三维深度信息,成本适中、精度良好,适用于机械臂抓取、无序分拣等场景。
多目视觉(多视点立体成像)则通过多相机或单相机移动获取多幅图像,结合从运动恢复形状(SfM)技术,可实现场景的全域三维重构,还能跟踪目标控制点并实时恢复相机姿态与位置。
光场成像作为立体视觉的创新形态,突破了传统 2D 相机的成像局限,在传感器前增加微透镜阵列,捕捉光线的方向与位置信息,实现“先拍照、后聚焦”的灵活处理,具备大景深、适中的精度与视野,适合机器人的复杂 3D 应用场景,仅受限于当前工业级产品成本较高的问题。
5. 方案对比速览
不同 3D 视觉成像技术在精度、效率、成本、环境适应性上各有优劣,形成了互补的技术格局,为工业场景提供多元化的选择:ToF 成像主打高速远距离,适合大范围快速感知;扫描式成像聚焦高精度,适配电子制造、精密检测等精密工业场景;结构光投影成像兼顾精度与成本,是工业机器人手眼系统的主流选择;立体视觉成像模拟人眼感知,双目方案性价比突出,光场成像则为复杂场景提供创新解决方案。
| 成像方案 | 核心原理 | 核心优势 | 主要局限 | 典型工业应用 | |
| 飞行时间法 | 测量光脉冲飞行时间 | 速度快、视野大、距离远、成本低 | 精度较低 | 物流分拣、大范围避障、人流计数 | |
| 扫描法 | 主动三角法 | 点/线光束扫描、三角测量 | 精度高、技术成熟 | 扫描速度相对较慢 | 精密部件测量、逆向工程、焊缝跟踪 |
| 色散共焦法 | 光的波长色散测距 | 极高精度,可测透明/镜面 | 成本高、速度较慢 | 手机盖板、玻璃、晶圆检测 | |
| 结构光投影法 | 投射编码光,解码形变 | 精度与速度平衡好 | 易受环境光干扰、对反光物体敏感 | 拆码垛、三维抓取、表面缺陷检测 | |
| 立体视觉法 | 多视角图像视差计算 | 硬件简单、纹理丰富场景效果好 | 依赖纹理、计算复杂、易受遮挡 | 机器人导航、安防监控、AR/VR | |
选择哪种3D视觉方案,本质上是在精度、速度、测量范围、环境适应性以及成本之间进行权衡。例如,追求极高精度测量透明件,色散共焦法是利器;而需要快速、大范围地引导机器人抓取,飞行时间法或结构光法则更为合适。
希望以上介绍能帮助您更好地理解这些技术。如果您对特定技术如何应用于您的具体场景有进一步疑问,例如需要高速抓取的视觉引导系统等,我们很乐意提供更深入的探讨。
-
机器视觉
+关注
关注
165文章
4824浏览量
126464 -
测量
+关注
关注
10文章
5711浏览量
116963 -
3D视觉
+关注
关注
4文章
489浏览量
29306
发布评论请先 登录
高精度3D扫描如何实现?
知微传感发布高精度、小体积、低成本的3D视觉新品
基于LabVIEW FPGA的3D测量提高精度
海康机器人推出基于机器视觉引导机械臂拆码垛方案
生产企业应用视觉拆码垛可以带来什么好处?
如何实现高精度的3D感知
高效灵活,3D视觉引导纸箱拆码垛助力仓储物流创新
曲面玻璃3d扫描设备线轮廓测量面轮廓检测间隙面差分析

纸箱的拆码垛,3D视觉引导机器人无序抓取



评论