 3DGS技术详解(一):3DGS如何融合动态天气与光照等环境因素?
3DGS技术详解(一):3DGS如何融合动态天气与光照等环境因素?

▍文章来源于康谋自动驾驶
01 引言
无论是暴雪过后的街道、夜幕下车灯照亮的路面、还是雨雾交织的高速公路——这些对人类驾驶员而言习以为常的场景,却构成了自动驾驶系统面临的环境感知极限挑战。这是由于传统3D场景重建技术在面对复杂环境时常常力不从心:要么把雪花当成场景的一部分输入进模型,要么在光照变化时直接失效。
近年来,3D高斯泼溅(3D Gaussian Splatting, 3DGS)技术的崛起,为这一困境带来了革命性转机。该技术不仅实现了近乎实时的逼真场景渲染,更在动态天气建模、光照变化处理等关键领域取得突破性进展,正在重新定义自动驾驶仿真系统的能力边界。
本文将系统梳理3DGS从静态重建到动态环境建模的技术演进,并探讨其在自动驾驶仿真中的实践应用。
02 静态重建到动态环境的技术演进
3DGS的核心机制与局限
3DGS用数百万个3D高斯椭球体来表示场景,每个高斯体携带位置、协方差、不透明度和颜色信息。渲染时按深度排序投影到2D平面,通过alpha混合生成最终图像。相比NeRF需要对每个像素进行耗时的体积渲染,3DGS的光栅化过程能充分利用GPU并行计算,实现实时渲染。
但原始3DGS有个致命缺陷:它假设场景静态、光照恒定。这在博物馆文物扫描中没问题,但放到真实世界就行不通了。雪天拍摄的街景会把空中飘落的雪花、镜头上的水滴都当作场景固有特征学习进去,导致重建出的场景永远"下着雪"。
天气环境重建
真实世界的天气环境重建需要攻克三个核心难题:天气伪影的分离去除、动态天气效果的逼真生成,以及移动光源下的场景重建。针对这些挑战,研究者们提出了多项创新解决方案,本文将聚焦三篇代表性论文进行分享交流:
天气伪影的分离与去除——WeatherGS:https://arxiv.org/pdf/2412.18862
动态天气效果的生成——Let it snow:https://arxiv.org/pdf/2504.05296
移动光源下的场景重建——DarkGS:https://arxiv.org/pdf/2403.10814
天气伪影的分离与去除
WeatherGS将天气干扰分为两类:空气中的密集粒子(雪花、雨滴)和镜头表面的稀疏遮挡(水珠、雾气)。前者分布广泛但单点影响小,后者局部遮挡严重但数量有限。
研究者设计了“密集到稀疏”的两阶段预处理流程:首先用大气效应滤波器清除空气中的气象干扰,类似图像去噪但需保留场景真实纹理;随后用镜头效应检测器提取稀疏遮挡掩膜,标记被镜头污染遮挡的像素。处理后的图像和掩膜一起送入3DGS训练,被遮挡区域不参与损失计算,从而恢复出干净的底层场景。
这套方案的难点在于平衡:去除太激进会损失场景细节,太保守则天气伪影残留。更棘手的是,不同天气条件(暴雪、小雨、雾霾)的特征差异很大,模型需要具备跨场景的泛化能力。
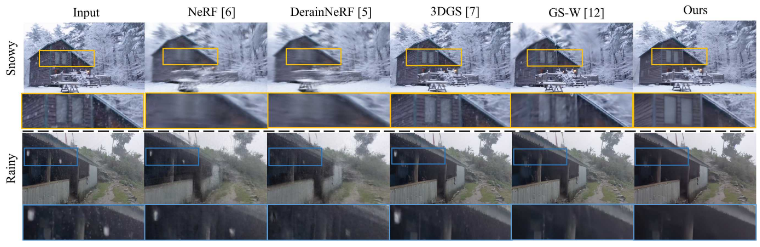
图1:不同方法在雨雪天气下的伪影去除效果
动态天气效果的生成
去除天气伪影只是第一步,更进阶的需求是在干净场景上主动添加可控的天气效果。在清除伪影的基础上,“Let it Snow”进一步实现了可控天气效果的主动添加。该方法创新性地结合了物理仿真与AI生成模型:物理引擎确保粒子运动符合重力、风力等自然规律;视频扩散模型则通过学习真实天气视频,引导3DGS中的粒子外观逼近真实效果。
通过联合优化框架,物理先验与视觉先验协同工作,既保证了雪花飘落、雨滴溅射的物理合理性,又实现了照片级的渲染质感。

图2:天气粒子效果
移动光源下的场景重建
自动驾驶车辆经常在夜间或隧道等暗光环境中工作,此时车载光源成为主要照明。但这带来同一路面,车辆靠近时被强光照亮,远离时又陷入黑暗,视觉外观完全不同的棘手问题。传统3DGS会把不同光照下的观测当作不同的表面材质来学习,导致重建失败。
DarkGS针对自动驾驶常见的夜间或隧道场景,提出了NeLiS光源模型。该模型通过数据驱动学习真实光源行为,包含四个组件:相对照度分布用神经网络学习光源的角度相关特性;光衰减函数采用Lorentzian函数引入可学习参数;环境光建模考虑非完全黑暗环境的基础照明;BRDF模型采用Lambertian反射描述表面材质。
训练时同时优化场景几何、表面反照率和光源参数。同时为避免高度耦合的参数陷入局部最优,训练采用分阶段预热策略:先固定光源姿态学习场景结构,再逐步放开光源参数进行联合优化。一旦完成标定,即可在重建场景中自由调整光源位置与强度,模拟从正午阳光到夜间车灯的全时段光照变化。
图3:移动光源下的场景重建效果
03 aiSim的3DGS实践
现实困境
首先长尾场景的采集一直以来都是自动驾驶发展中难题之一。系统的安全性高度依赖其对极端情况的应对能力,但这些Corner Case在实际道路上出现概率极低。例如,一辆测试车可能行驶数千公里才能遇到一次暴雪天气,数万公里才会碰到夜间施工区域的复杂光影场景。若完全依赖实车采集来覆盖这些罕见状况,所需的时间与经济成本将难以承受。
此外,传统仿真技术虽能快速生成数据,却在真实感上存在明显不足。比如基于游戏引擎的仿真平台(如CARLA、LGSVL)依赖于手工建模的场景和预设的天气系统,其视觉表现与真实世界仍存在可察觉的差距。例如,雨滴的运动轨迹往往过于规则,水面反射缺乏自然变化,雨雾的层次感与遮挡效果也不够真实。在光照模拟方面,游戏引擎常用的简化模型(如Phong、Blinn-Phong)难以准确复现车灯在湿滑路面上的复杂反射、路灯透过雨雾的散射等关键光学现象,而这些恰恰是夜间驾驶感知系统必须可靠应对的场景。
aiSim的3DGS场景重建
aiSim采用3DGS作为核心场景表示技术,实现了“采集即建模”的高效工作流。数据采集车只需搭载多目相机和激光雷达,在目标区域正常行驶一遍,就能收集到重建所需的多视角图像和稀疏点云。回到实验室后,3DGS重建流程可以在几小时内完成,这比传统建模快了几个数量级。
重建出的场景保留了真实世界的所有细节,如路面的磨损纹理、建筑物的风化痕迹、植被的自然分布等。这种“照片级”的还原度让仿真数据与真实数据在视觉统计特征上高度一致,大幅缩小sim-to-real gap。更重要的是极具可扩展性,当需要新场景时,只需派出采集车跑一趟,无需等待建模团队排期。这种"采集即建模"的模式让场景库的增长速度与算法迭代需求相匹配。
环境因素的精细控制
天气系统:aiSim支持对3DGS重建场景的天气修改。用户可以通过参数面板调节天气条件、天气粒子强度、能见度等参数,系统实时生成对应的天气效果。
光照系统:aiSim每个场景在重建时会同步标定光源特性,包括太阳光的方向和强度、环境光的色温。在仿真时,可以任意调整时间、添加或移除人工光源。一个典型应用场景是测试车辆在隧道出入口的适应性:隧道内是昏暗的人工照明,出口处是刺眼的阳光,这种剧烈的光照变化会导致相机曝光失调。在aisim中可以精确复现这一过程,让感知算法在仿真中充分训练应对策略。
材质与反射:aiSim可以在3DGS重建的场景中模拟不同材质在不同光照下的表现。如干燥路面的漫反射与积水路面的镜面反射,复现车灯光斑等关键视觉特征。

图4:不同天气/光照下,aiSim中3DGS场景重建效果
3DGS的核心机制与局限
aiSim结合Word Extractor工具链,可实现3DGS场景的快速提取与重建。在真实数据重建的基础上,系统支持多层次程序化扩展:
在重建的道路网络上根据交通规则生成车辆、行人的运动轨迹;
定义天气变化的时间序列,例如“晴天→多云→小雨→暴雨”的渐变过程;
模拟一天中太阳的运动轨迹,或者夜间路灯的闪烁、对向车辆远光灯的晃动。
这种“真实基底+程序化变化”的模式兼顾了真实感和可控性。基础场景的真实性保证了数据分布的准确性,程序化变化则提供了测试所需的多样性和可重复性。
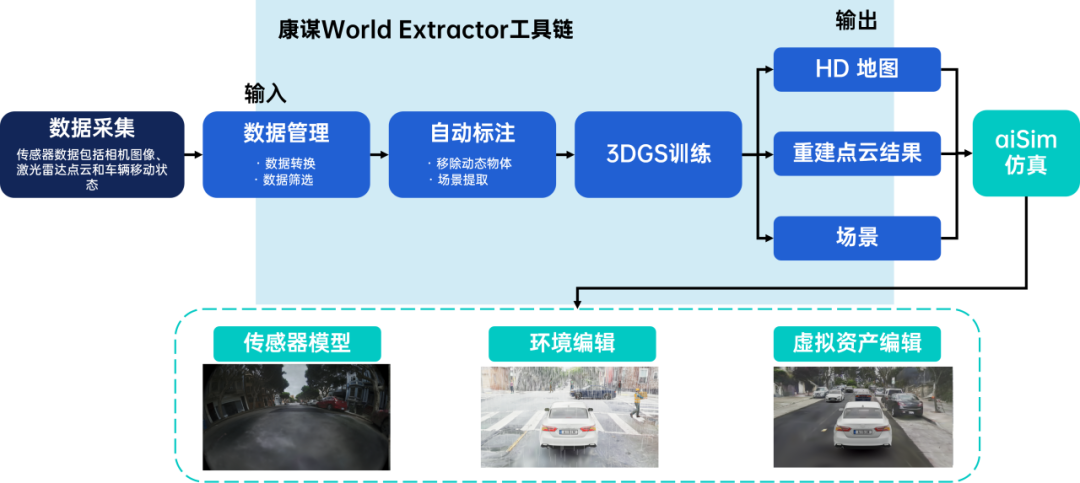
图5:Word Extractor工具链
04 结语
总之,3DGS技术在环境因素处理上的系列突破——从WeatherGS的伪影分离,到“Let it Snow”的动态天气生成,再到DarkGS的移动光源建模——共同推动着虚拟仿真向真实世界复杂性的不断逼近。
可以这样说,aiSim将这些前沿研究转化为工程实践,构建了一个既高度真实又完全可控的自动驾驶测试环境。在重建的3DGS场景中,暴雪可以按需降临,夜晚可以随时切换到正午,同一场景可在无限变体中反复验证算法鲁棒性。
尽管当前的3DGS方案在处理镜面反射、透明物体、动态阴影等方面仍有局限,多传感器融合仿真也有待完善。但技术方向已经明确:通过真实数据驱动的场景重建,结合物理规律与AI生成的环境模拟。而行业内的我们,正在朝着方向构建一个足以支撑L4级自动驾驶验证的仿真体系。
-
3D
+关注
关注
9文章
3024浏览量
115602 -
仿真
+关注
关注
55文章
4539浏览量
138688 -
自动驾驶
+关注
关注
795文章
15008浏览量
181638
发布评论请先 登录
3DGS 与 OpenMATERIAL:场景表示与材质标准的分层协同

3DGS技术详解(二):视觉重建到物理仿真,3DGS如何走向工程应用?
2026年,3DGS和世界模型,在自动驾驶仿真中的组合应用
自动驾驶场景生成方法及优选方案:康谋aiSim 3DGS方案重塑行业标准

摩尔线程在SIGGRAPH Asia 2025斩获3DGS重建挑战赛银奖

攻坚农业仿真挑战:Robotec农业机器人仿真平台

从“重建”到“可用”:aiSim3DGS方案如何闭环自动驾驶仿真场景?
直播邀约 | 10月21日15点,从三维重构到仿真革新:3DGS技术解析与实践应用!
ROS 传感器模块的通用架构设计与跨中间件扩展实践
一种适用于动态环境的实时RGB-D SLAM系统

一种适用于动态环境的3DGS-SLAM系统

康谋方案 | 高精LiDAR+神经渲染3DGS的完美融合实践

三维高斯泼溅大规模视觉SLAM系统解析




评论