 ROS 传感器模块的通用架构设计与跨中间件扩展实践
ROS 传感器模块的通用架构设计与跨中间件扩展实践

在自动驾驶与机器人仿真领域,传感器数据的高效交互是连接虚拟仿真与实际系统的关键纽带。ROS(Robot Operating System) 作为行业通用的机器人操作系统,其传感器数据交互机制直接影响仿真的真实性与系统集成的便捷性。
本文基于对aiSim 中各类 ROS 传感器(时钟、GPS、IMU、激光雷达、车辆、相机)模块的源码学习,梳理了它们的共性架构与实现要点,并结合 aiSim‑SDK 中相机模块的通用设计,对跨中间件扩展性提出思考。
通用架构与设计模式
aiSim 中 ROS 传感器模块的设计遵循了一系列通用原则,这些原则构成了整个系统的 “骨架”,确保了不同传感器在交互方式、数据处理等方面的一致性。
双层分离:职责清晰的架构基础
aiSim 的 ROS 传感器模块采用双层分离架构,将与仿真引擎的交互和与 ROS 的桥接功能明确分开:
实现层(xxx_ros_sensor.cpp/.h):专注于与仿真引擎的交互,负责从仿真中采集数据、进行时间同步处理,并将仿真数据封装成 ROS 消息;
代理层(xxx_ros_sensor_proxy.h):作为 ROS 节点与仿真系统的连接枢纽,承担节点延迟初始化、ROS 回调函数注册及话题消息筛选等核心功能。通过封装标准化的 ROS 通信接口(如自定义消息类型、服务接口),实现了对实现层与应用层模块的有效解耦,避免了实现层内部接口直接暴露给应用层节点。
这种架构使得模块的维护和扩展更加便捷,当 ROS 版本更新或中间件更换时,主要修改代理层即可,对实现层的影响较小。
发布者创建流程与消息发布机制
发布者的创建和消息发布是传感器与 ROS 进行数据交互的核心流程:
发布者创建:首先通过单例模式获取 ROS 节点,auto& ros_bridge = RosBridge::Instance(true); auto node = ros_bridge.GetNode();,然后在构造函数中创建发布者并绑定话题,m_publisher = node->create_publisher("/topic_name", qos);,确保了发布者与特定话题的关联;
消息发布机制:在SendMsg函数中,将仿真输出的数据转换为 ROS 消息格式,设置消息头的时间戳为当前节点时间,msg.header.stamp = node->now();,然后填充数据并发布,m_publisher->publish(msg);,保证了数据的及时传递。
动态注册与QoS
通过动态注册和QoS 与时间同步两大机制,分别实现了部署灵活性的提升与数据处理可靠性的保障:
动态注册:借助 SensorFactory 和 ConfiguratorApplication,从 JSON 配置文件中动态创建传感器实例,摆脱了对硬编码的依赖。这意味着在不修改代码的情况下,通过修改配置文件就能添加或修改传感器,极大地提高了系统的灵活性。
QoS 及时间同步:QoS 的队列长度设置保证了未处理消息的缓存,防止高频数据丢失;而 ClockRosSensor 发布的/clock话题,为各节点提供了统一的仿真时间基准,确保了整个系统时钟的一致性,避免了因时间不同步导致的数据处理错误。
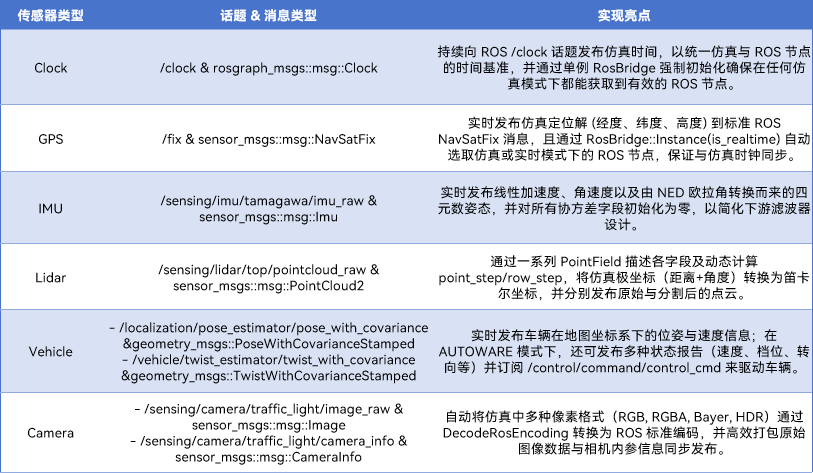
各传感器模块要点
在通用架构的基础上,不同类型的传感器根据其功能特点,有着各自独特的实现要点,共同构成了整个传感器系统。
aiSim‑SDK 传感器模块:通用化示例
虽然上面的内容聚焦在 ROS 中间件上,aiSim‑SDK 的传感器模块(以camera为例)设计却不依赖 ROS,可直接扩展至其他通信框架,为跨中间件扩展提供了可能,其相机模块的通用化设计具有代表性。

消息定义(camera_sensor_messages.h)
MessageType 枚举:列举了传感器初始化、订阅、配置查询及各种相机输出(颜色、深度、分割、边界框、车道、元数据等)的一致化消息类型。
Config与请求/响应机制:通过 InitRequest/InitResponse、SubscribeRequest、GetConfigRequest/GetConfigResponse 等消息,实现对更新间隔、时间偏移和可选功能的动态配置管理。
统一消息封装:以 CameraMessage 为基类衍生多种具体数据消息,并使用std::variant 将它们封装为单一类型以简化处理。
代理层(camera_sensor_proxy.h)
初始化与配置:构造函数通过 InitRequest 向底层传感器发送配置并校验响应错误,以确保代理层与模拟传感器的对接正确。
统一回调订阅:模板化的 SubscribeToNotification 方法为所有 CameraMessageTypes 注册同一回调,且对高频大数据的 ColorImageMessage 采用零拷贝以降低性能开销。
可插拔通信接口:依赖 BinarySerializerClient 抽象,代理层仅需替换该序列化/传输实现,便可对接不同中间件或网络协议。
核心处理(camera_sensor.cpp)
异步捕获与处理:使用 CaptureNonBlocking 非阻塞地获取图像帧,并在 ProcessDataAsync 中按需生成多种消息(如彩色图、深度图、分割图等)。
功能插件化:通过可选的 BoundingBoxCalculator 和 LaneCalculator 模块,动态启用目标边界框计算和车道线检测,无需修改核心流程即可扩展新算法。
统一消息发布:FillCommonMessageFields 在所有消息中注入车辆名、传感器名、时间戳与序列号,并通过零拷贝或常规方式一次性发布所有可用数据。
模块化与可扩展性总结
aiSim中ROS传感器模块的设计充分体现了模块化和可扩展性的理念。通过通用架构的搭建,确保了不同传感器在交互方式上的一致性;各传感器模块根据自身特点进行个性化实现,满足了不同的数据采集需求;而 aiSim-SDK 的通用化设计,则突破了 ROS 中间件的限制,为系统向更多通信框架扩展奠定了基础。
这种设计不仅提高了仿真系统的开发效率和维护便捷性,也使得仿真数据能够更顺畅地与实际自动驾驶系统进行集成,为自动驾驶技术的研发提供了有力的支撑。在未来,随着技术的不断发展,这种模块化、可扩展的设计思路将在更多领域发挥重要作用。
-
传感器
+关注
关注
2577文章
55460浏览量
793779 -
自动驾驶
+关注
关注
794文章
14979浏览量
181397 -
ROS
+关注
关注
1文章
296浏览量
18859
发布评论请先 登录
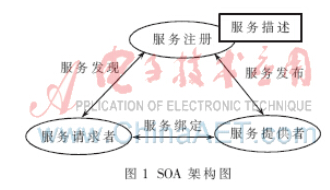
基于SOA的数字电视中间件系统的研究与实现
将集群技术引入到RFID中间件的设计讨论
一个基于漏洞扫描的安全中间件架构设计
基于JMS的RFID中间件设计与实现

NGB中间件标准考虑因素
基于通用中间件接口服务器的远程医疗信息系统

基于ARM的RFID中间件系统设计
常见的中间件有哪些?汇总解析
RFID系统中间件平台架构研究
物联网软件系统中的RFID中间件介绍




评论