 CW32L012对MPU6050的数据进行卡尔曼滤波
CW32L012对MPU6050的数据进行卡尔曼滤波

卡尔曼滤波(最优估计)
一、什么是卡尔曼滤波
通俗理解卡尔曼滤波:一个「会自动调权重的裁判」
卡尔曼滤波解决的核心问题是:你有两个途径(测量和预估得到)知道同一个东西的状态,但这两个途径都不准,卡尔曼帮你算出最准的结果
最优估计公式:


二、为什么这里要用卡尔曼
下面是MPU6050加速度计和陀螺仪的优缺点:


总的来说:
陀螺仪动态的时候输出的值精准,但是静止的时候会有漂移
而加速度计就反过来了,加速度计静态的时候输出的值准,但是动态特性差
MPU6050 的陀螺仪和加速度计是 “天生的互补搭档”,但单靠其中一个或简单滤波,要么漂移、要么动态失真;而卡尔曼滤波的核心是 “动态加权的最优估计” —— 它能根据 MPU6050 的工作状态(静态 / 动态),自动判断两个传感器的可靠性,把陀螺仪的 “动态精准” 和加速度计的 “静态稳定” 结合起来,最终输出既无漂移、又能快速响应的 roll/pitch 角度,这是其他滤波方式无法实现的。
三、卡尔曼滤波实现
一、思路
根据之前的内容,我们已经得到了加速度计解算的roll和pitch,以及角速度计解算的roll、pitch、yaw,因为加速度计无法解算yaw,所以这里只对roll和pitch做数据融合
卡尔曼最优估计的核心目标是融合 “加速度计解算的角度” 和 “陀螺仪角速度积分的角度”,最终输出最优的角度估计。整体逻辑分为两大阶段:
预测阶段:基于陀螺仪角速度(扣除偏置后)积分,预测当前角度;同时更新状态误差协方差矩阵 P(反映估计的不确定性)。
更新阶段:用加速度计的角度作为观测值修正预测值,得到最优角度;同时修正陀螺仪偏置(补偿零漂),并更新协方差矩阵 P。
二、具体实现
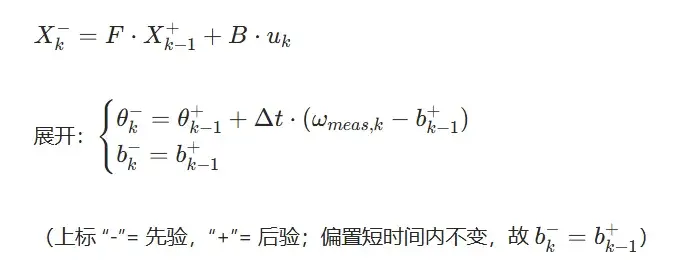
2.1预测阶段(先验估计)
状态预测:用陀螺仪积分预测角度
对应代码:
// 预测阶段:更新角度预测
float rate = newRate - *kalmanBias; // 真实角速度 = 测量角速度 - 偏置
*kalmanAngle += dt * rate; //角度预测:θ_k = θ_{k-1}+ dt*(ω - b)
协方差预测:更新估计的不确定性
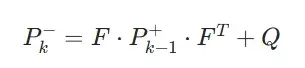
先计算:

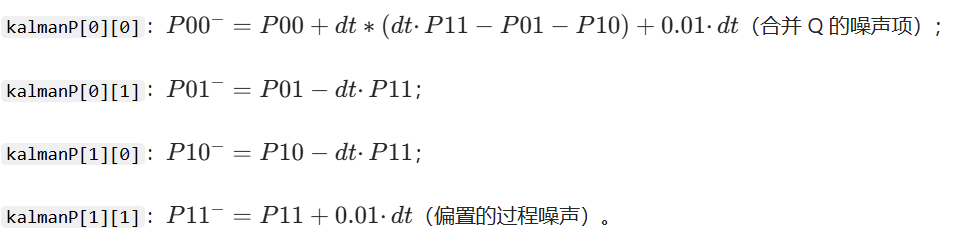
再加上Q得到:
对应代码:
kalmanP[0][0] += dt * (dt * kalmanP[1][1] - kalmanP[0][1] - kalmanP[1][0] + Q_ANGLE);
kalmanP[0][1] -= dt * kalmanP[1][1];
kalmanP[1][0] -= dt * kalmanP[1][1];
kalmanP[1][1] += Q_BIAS * dt;
2.2更新阶段(后验修正)
残差(创新项):观测值与预测值的偏差

卡尔曼增益:权衡 “预测” 和 “观测” 的可信度

对应代码:
// 计算卡尔曼增益K
float S = kalmanP[0][0] + R_MEASURE; // 角度方差+测量噪声方差(R)
float K[2];
K[0] = kalmanP[0][0] / S;
K[1] = kalmanP[1][0] / S;
状态更新:修正预测值,得到最优估计
对应代码:
// 更新阶段:利用加速度计测量值修正预测角度
float y = newAngle - *kalmanAngle; // 改用传入的角度
*kalmanAngle += K[0] * y; // 修正角度
*kalmanBias += K[1] * y; // 修正偏置
协方差更新:修正估计的不确定性

对应代码:
// 更新协方差矩阵P
float P00_temp = kalmanP[0][0];
float P01_temp = kalmanP[0][1];
kalmanP[0][0] -= K[0] * P00_temp;
kalmanP[0][1] -= K[0] * P01_temp;
kalmanP[1][0] -= K[1] * P00_temp;
kalmanP[1][1] -= K[1] * P01_temp;
一、为何用匿名上位机调试
匿名上位机是一款由国内开发者打造、面向嵌入式开发场景的开源 / 低成本 PC 端调试工具,相比普通串口助手只能显示一串冰冷的欧拉角数字,匿名上位机可将 Roll/Pitch/Yaw 以实时曲线、数值仪表盘、3D 模型姿态仿真等形式呈现 —— 当我们晃动搭载 MPU6050 的 CW32L012 开发板时,上位机的 3D 模型会同步倾斜、转向,曲线会实时跟踪欧拉角数值变化,你能快速判断卡尔曼融合后的姿态解算是否准确(如零漂是否被抑制、动态晃动时欧拉角是否无明显跳变),无需逐行核对数字。
二、通信帧格式
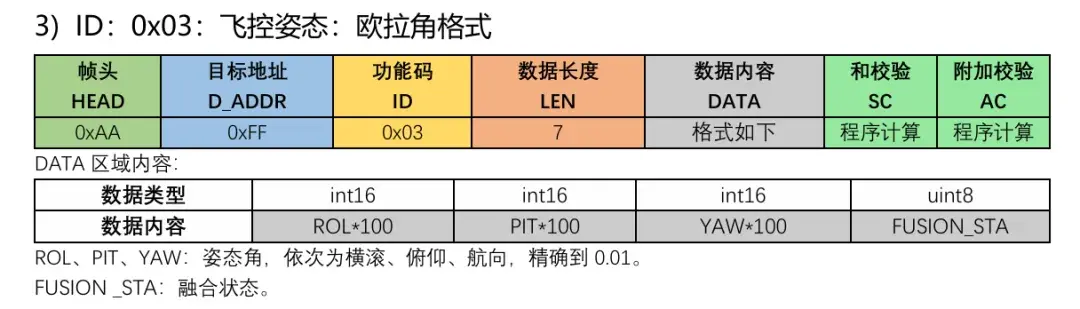
初始化L012串口,并根据通信格式编写匿名上位机的通信驱动:
程序实际现象
【CW32L012解算MPU6050的姿态数据并进行卡尔曼滤波的方法-哔哩哔哩】
https://b23.tv/2GZqcIg
一、开发板现象:
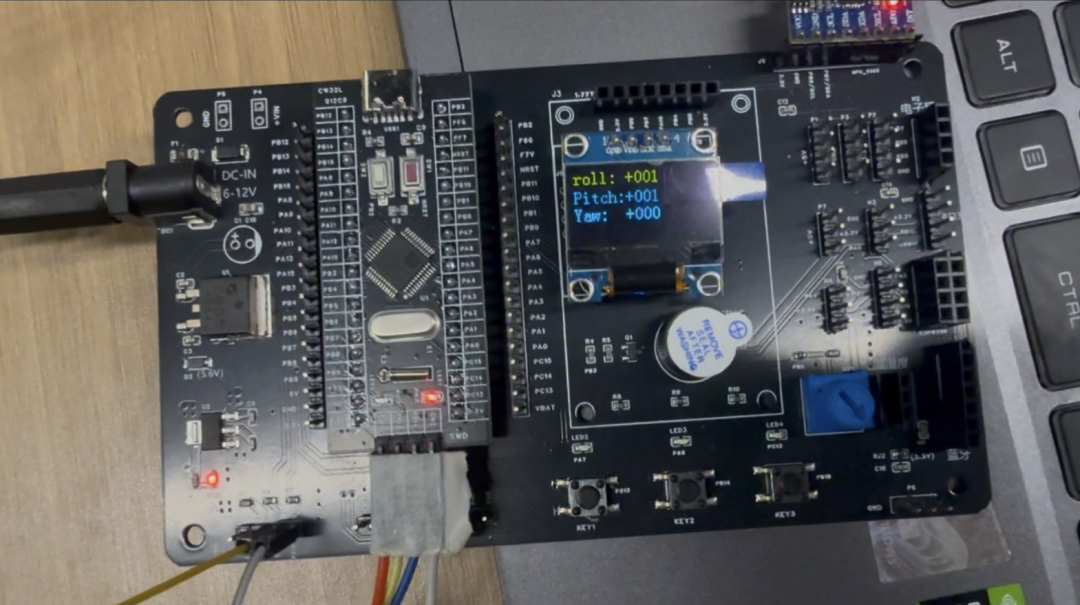
OLED屏幕实时显示解算的三轴角度
二、匿名上位机现象
【CW32L012使用MPU6050介绍-哔哩哔哩】 https://b23.tv/fi7hCnw
-
加速度计
+关注
关注
6文章
823浏览量
48321 -
卡尔曼滤波
+关注
关注
3文章
167浏览量
25482 -
MPU6050
+关注
关注
39文章
313浏览量
77066
发布评论请先 登录
MPU6050与卡尔曼滤波互补滤波的比较分析

使用51单片机实现MPU6050的卡尔曼滤波算法代码免费下载
串口MPU6050卡尔曼滤波6轴9轴资料合集免费下载
毕业论文 | 基于MPU6050及卡尔曼滤波的平衡小车设计(源代码与设计文档)




评论