mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15:24 41330
41330 我现在用手机通过HC05蓝牙模块实现了对遥控车的控制,现在要在这个基础上增加一个MPU6050模块,我想把这个MPU6050模块的姿态数据通过HC05蓝牙模块在手机上显示出来,我用的野火
2023-10-07 08:02:38
MPU6050姿态融合解算(DMP)
2021-12-06 13:21:10 32
32 MPU6050使用互补滤波与卡尔曼滤波算法进行姿态解算
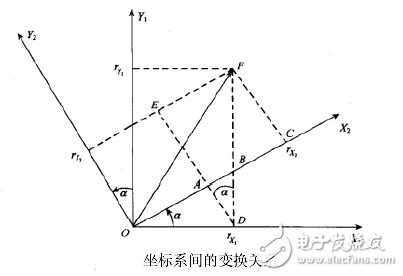
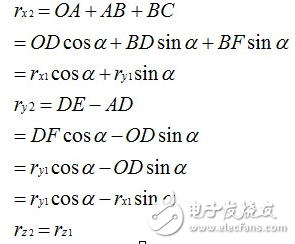
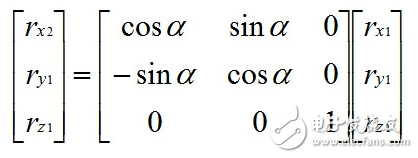
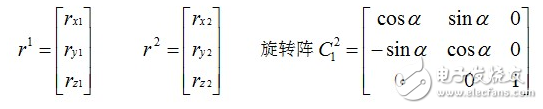
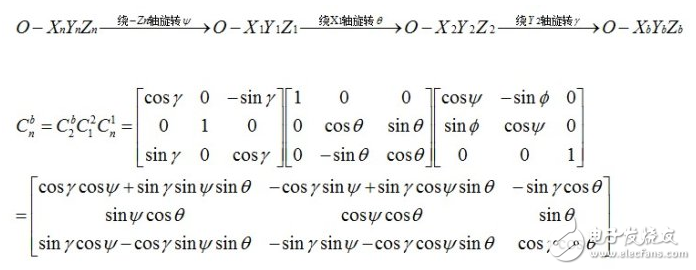
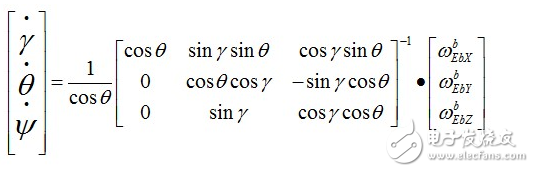
2023-08-07 15:46:561 使用MPU6050硬件DMP解算姿态是非常简单的,下面介绍由三轴陀螺仪和加速度计的值来使用四元数软件解算姿态的方法。我们先来看看如何用欧拉角描述一次平面旋转(坐标变换):MPU6050的四元数解算
2021-12-06 12:36:0623 介绍一个学长做的单片机项目教程:MPU6050姿态解算大家可用于 课程设计 或 毕业设计技术解答毕设帮助:<Q>7468760412 MPU6050MPU6050是一种非常流行的空间运动传感器芯片,可以获取器件当前的三个加速度分量和三个旋转角速度。由于其体积小巧,功能强大,
2021-12-06 12:51:109 针对四轴飞行器姿态信息的实时准确获取问题,对四轴飞行器的姿态解算方面进行了研究。在分析姿态表示的四元数法和欧拉角法基础上,以成熟的Mahony互补滤波算法为例比较了软件姿态解算和基于MPU6050
2018-03-08 09:19:547 本程序是基于Mpu6050,所做的四元数结算 相当稳,希望对大家有所帮助
2016-08-17 10:36:5590 介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶互补算法和卡尔曼滤波算法。
2017-12-11 13:31:4069642 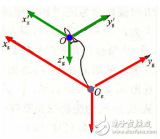
最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或四元数表示,为了减少计算量(欧拉角涉及正弦运算,运算量相对较大),方便在STM32主控上实现,可以转换成四元数表示。
2017-11-07 10:39:3017853 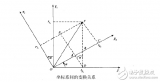
本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、DMP姿态解算后的俯仰角、横滚角和航向角。
2017-12-11 14:26:5234513 
本文开始阐述了卡尔曼滤波的概念,其次阐述了卡尔曼滤波的性质与卡尔曼滤波的应用,最后介绍了mpu6050卡尔曼滤波分析及mpu6050卡尔曼滤波输出姿态角程序。
2018-03-09 08:57:3170608 
对于大多数MPU6050的应用来说,获取到的原始数据并没有多大用处,我们需要对原始数据进行姿态融合解算,最终得到姿态数据,也就是三个欧拉角:航向角(yaw)、横滚角(roll)和俯仰角(pitch)。
2023-06-15 15:03:39884 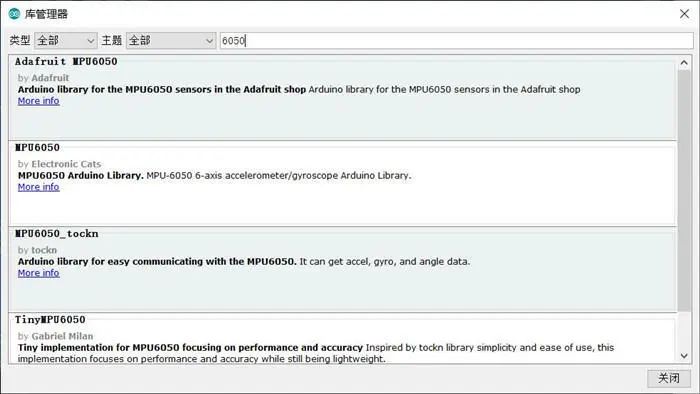
毕业论文 | 基于STM32的MPU6050程序设计(源码)——卡尔曼滤波
2021-12-06 12:06:0839 MPU6050简介什么是MPU6050MPU6050的特点MPU6050框图MPU6050初始化MPU6050—DMP使用介绍MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2021-12-06 11:51:1166 下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态解算)零偏
2021-12-06 12:06:0733 # MPU6050常见问题的分析与处理本文主要针对STM32使用MPU6050过程中产生的问题进行分析和处理,部分内容也适用于其他单片机。本文基于MPU6050自带的DMP算法。文章内容对于MPU6050调试过程有一定的帮助。
2021-12-06 12:21:0639 MPU6050程序,想了解、想要的小伙伴赶紧看看哦!
2015-12-15 13:51:5837 MPU6050 MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital
2021-12-06 15:36:096 MPU6050 MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital
2021-12-06 12:06:080 不采用DMP,直接用单片机实现姿态解算。如上图所示,SCL 和 SDA 是连接 MCU 的 IIC 接口,MCU 通过这个 IIC 接口来控制 MPU6050,另外还有一个 IIC 接口:AUX...
2021-12-06 13:06:1514 MPU6050开发 -- 数据分析
2021-11-30 11:21:0422 C语言 | 基于STM32的MPU6050模块程序(主程序)
2021-12-06 15:06:1245 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3070 MPU6050的DMP自检与姿态换算的问题
2021-12-06 16:51:1116 在进行姿态解算分享之前,先分享一个踩坑经历。一般来说MPU6050的ID读出为0x68,淘宝上买到的模块,基本上都是这个。
2023-07-04 09:15:29182 下载,在公众号:小白学移动机器人,发送:MPU6050,即可获得。2.4.1 解决的问题DMP库的移植(文件已被更改过,更好的移植)MPU6050数据的获取(通过DMP获取的四元数,做姿态解算)零偏自动...
2021-12-06 17:06:1016 mpu6050详细源码,配有电路图以及初始化C语言程序。详细的mpu6050中文资料!
2016-02-18 11:53:2090 MPU6050( )
2021-12-06 15:06:1123 轴当前的姿态. 所以,MWC的源程序里面也就没有使用 MPU6050的 DMP进行计算姿态. 笔者为了计算做产品. 研究了很长时间的MWC源程序始终没看懂. 后来不得已.最终在同事的劝说下.鼓起勇
2021-12-06 16:51:101 为避免纠缠于电路细节,我们直接使用集成的MPU6050模块。MPU6050的数据接口用的是I2C总线协议,因此我们需要Wire程序库的帮助来实现Arduino与MPU6050之间的通信。请先确认你的Arduino编程环境中已安装Wire库。
2017-11-07 14:25:066679 InvenSense公司的三轴陀螺仪MPU6050测试程序。IIC接口,51单片机驱动,LCD1602同步显示。
2017-11-07 14:01:265584 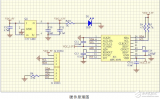
本文开始介绍了mpu6050的定义和mpu6050的感测范围,其次阐述了mpu6050特征,最后介绍了mpu6050与单片机的连接方法。
2018-03-09 08:42:3325602 MPU6050 相关资料 源程序 原理图
2015-11-11 11:48:3933 STM32F103C8T6 USB HID下位机/MPU6050状态数据解算 /毕业设计
2021-12-06 17:06:1027 MPU6050模块,如图 1所示。该模块集成了一片MPU6050芯片和一片STM8S003F3P6单片机,具有串口和I2C接口。MPU6050中的DMP(数字运动处理器)对姿态进行融合,STM8
2017-11-07 14:06:4113602 MPU6050 用51单片机串口测试程序,通过1602显示数据
2016-04-28 14:57:0932 MPU6050使用卡尔曼滤波的方法介绍,使用卡尔曼滤波获得的姿态角更准确
2016-06-01 11:29:20145 ——来自迪文开发者论坛用户本方案使用COF屏的IO口模拟I2C信号与MPU6050通讯,实现航空姿态仪表可视化显示。MPU6050采集数据,T5L0芯片进行数据读取和滤波算法处理,计算出姿态数据
2022-05-31 11:30:30536 
MPU6050数据手册,规格说明
2022-03-09 15:03:5482 电子发烧友网站提供《MPU6050教程开源分享.zip》资料免费下载
2023-06-25 15:18:144 本文档的主要内容详细介绍的是使用Arduino读取MPU6050数据的程序免费下载。
2019-07-24 17:17:3927 本文开始对mpu9150进行了介绍,其次介绍了mpu6050的定义、mpu6050感测范围以及mpu6050的特征,最后阐述了mpu9150和mpu6050区别。
2018-03-08 10:07:1140722 电子发烧友网站提供《使用MPU6050、ESP8266和Qubitro进行ART分析.zip》资料免费下载
2022-10-28 09:33:332 MPU6050原理图,PDF格式,还蛮清晰。
2016-03-24 17:25:3797 四路dmp的mpu6050的STM32F103程序
2017-02-28 21:08:1013
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论