 Nature Sensors第2篇,院士团队突破可穿戴传感器技术限制
Nature Sensors第2篇,院士团队突破可穿戴传感器技术限制

近日,在Nature旗下传感器子刊《Nature Sensors》发表了其创刊第二篇论文,该论文设计可穿戴传感器技术突破,作者为斯坦福大学鲍哲南院士团队。
在可穿戴传感器领域,设计舒适性与实现高分辨率、大范围传感之间存在固有矛盾。高密度表面肌电图(EMG)设备虽然能精准捕捉手势、步态等复杂运动信息,但通常体积庞大、电极数量多,限制了其日常穿戴的实用性与用户体验。传统方法为提升识别精度往往需要增加传感器数量与覆盖面积,导致设备笨重、功耗高,难以在真实场景中持续使用。因此,如何以更少、更紧凑的传感器实现与高密度阵列相当的信号重建与动作预测能力,成为当前可穿戴感知技术的重要挑战。
近日,斯坦福大学鲍哲南教授团队提出了一种生成式肌电图网络(GenENet),结合柔性可拉伸传感器,能够从有限的传感器输入中重建未覆盖区域的肌肉活动信号,实现了用6通道设备达到32通道设备的识别性能。该系统在手语字母识别和步态动力学预测任务中表现出色,为低功耗、低复杂度的可穿戴生理监测设备开辟了新路径。

2025年12月1日,相关工作以“A simplified wearable device powered by a generative EMG network for hand-gesture recognition and gait prediction”为题发表在Nature Sensors上。 该研究提出了生成式肌电图网络(GenENet),该网络基于自编码器架构,通过自监督生成式表征学习训练,能从少量传感器输入中预测肌电图信息,识别大面积身体区域传感器激活的通用模式;同时,研发了由聚二甲基硅氧烷(PDMS)、耐溶剂聚(丙烯腈 - 丁二烯)(NBR)、镓铟共晶(EGaIn)电极、聚(3,4 - 乙烯二氧噻吩):聚(苯乙烯磺酸盐)(PEDOT:PSS)凝胶等组成的全可拉伸多阵列肌电图设备,用于收集高质量 32 通道数据以支持 GenENet 预训练(随机掩盖约 80% 数据,通过生成信号与完整信号对比学习重建缺失信息);随后将预训练模型与 6 通道简化设备集成,结合后训练网络提取时空肌肉活动关键特征,最终实现美式手语翻译和步态动力学预测,验证了低通道设备在保持性能的同时降低系统复杂度的可行性。
图文介绍
首先,研究了通过生成式肌电图网络(GenENet)实现手势与步态预测的基本框架(图1a)。该框架使用32通道可拉伸设备进行预训练,通过随机掩码输入信号并重建原始数据,学习肌肉活动的时空模式。在此基础上,构建了一个仅含6通道的简化设备(图1b),利用预训练网络从有限输入中预测未覆盖区域的肌肉活动。图中还展示了设备的实际形态与无线模块的连接方式(图1d–f)。该设计体现了GenENet如何通过先验知识迁移,在减少硬件复杂度的同时保持预测性能,为后续手势与步态任务的应用奠定了基础。

图1. 用于手语和步态预测的GenENet。a. 使用32通道可拉伸设备通过GenENet进行表征学习,随机掩蔽输入信号以重建原始数据。b. 使用更小的6通道设备,其中预训练网络预测未覆盖区域的肌肉活动。参考电极和接地电极置于右侧。c. 后训练网络,使预训练模型能够迁移到不同应用和用户。d-f. 分别展示与a-c各阶段对应的设备实物图。无线模块由柔性印刷电路板构成。
为了获取高质量的预训练数据集,研究设计了一种全可拉伸的多阵列EMG设备(图2a)。该设备采用多层结构,包括PDMS基底、NBR保护层、EGaIn液态金属电极、高导电PEDOT:PSS凝胶以及SBS封装层。电极在拉伸至100%应变时仍保持低阻抗特性(图2f),且与相同尺寸的Ag/AgCl电极相比,在握力测试中表现出更高的功率密度(图2g)。此外,与基于聚酰亚胺的非可拉伸阵列相比,可拉伸阵列在手腕握力测试中表现出更高的平均信噪比(15.06 dB vs. 12.19 dB)(图2h–i)。这些结果表明,可拉伸结构与低阻抗电极的设计显著提升了信号质量,为生成式网络的训练提供了可靠的数据基础。

图2. 用于生成高质量数据集的可拉伸传感器阵列。a. 32通道可拉伸阵列的分解视图,显示封装层、传感电极、互连线和基底。b. 32通道设备的侧视图。c. 设备原始状态与拉伸状态的对比。d. 32通道设备通过柔性扁平电缆连接到定制无线模块。e. 含有与不含有PEDOT:PSS的水凝胶的电化学阻抗谱。f.在100%应变下的阻抗耐久性图。小图显示PEDOT互连线在0%和100%应变下的状态。Z和Z0分别表示应变下和无应变状态下的阻抗。g. 使用测力计(电极附着于前臂)比较PEDOT凝胶与相同尺寸Ag/AgCl电极的韦尔奇功率谱密度估计。h,i. 在非可拉伸聚酰亚胺基底上制作的设备与在可拉伸基底上制作的设备的信噪比箱形图,显示可拉伸基底在32个通道上具有更高的平均信噪比。
在预训练阶段,研究采用32通道EMG阵列捕获手腕与小腿肌肉活动信号,并通过滑动窗口计算均方根值,构建32×32×1的时序-通道张量(图3c)。随后,随机掩码约81%的数据块,输入GenENet进行自监督训练(图3d)。网络基于编码器-解码器架构,通过多头部注意力机制学习信号中的广义表示。训练过程中,生成信号逐渐从随机噪声逼近原始信号,均方误差随训练周期下降(图3e)。多个样本在训练后的重建效果(图3f–g),证明GenENet能够有效从掩码输入中恢复完整的肌肉活动模式,为下游任务提供了可迁移的特征表示。

图3. GenENet的预训练过程。a. 32通道可拉伸设备在任意手指运动和行走时,从手腕或小腿捕获肌肉激活信号。b,c. 信号经过增强和均方根处理。d. 对后处理张量进行随机掩蔽,训练GenENet以最小化生成信号与原始信号之间的均方误差损失。E和D分别表示GenENet的编码器和解码器模块。e. 样本1的代表性信号,展示训练周期中被掩蔽、原始和生成的信号。右侧图表显示训练期间均方误差的下降。f. 训练过程中生成信号的详细图示。g. 训练450个周期后,样本2和样本3的结果。
研究将预训练的GenENet应用于美国手语识别任务,设计了一款6通道无线EMG手表(图4a)。信号经与预训练相同的后处理流程后,输入GenENet编码器提取潜在特征,再经由LSTM网络进行分类(图4c)。通过权衡通道数量与传感器面积对性能的影响,发现6通道在准确性与设备尺寸之间取得最佳平衡(图4e–f)。预训练模型在150个迁移训练周期内达到93.6%的验证准确率,显著优于未预训练的模型(图4g)。此外,设备在不同手腕位置与朝向下仍保持稳定的识别性能(图4h),并能实时输出字母预测结果(图4i)。通过梯度归因图分析,可进一步解释各通道信号对手势分类的贡献程度(图4j),增强了模型的可解释性。

图4. 使用GenENet设备预测美式手语。a. 通过六通道设备捕获的手语输入信号。b. 与预训练相同的后处理步骤(不包括数据增强)。c. 后处理张量输入GenENet,连接至CNN、LSTM和密集层。解码器和CNN的虚线部分仅在回归建模时激活。d. 手语手势分类。e. 通过平衡模型准确性和总传感器面积测量的品质因数。f. 品质因数在六通道区域达到峰值,增加通道数提高准确性但也增大了传感器面积。g. 使用六电极EMG阵列进行手指运动识别时,预训练GenENet与非参数化GenENet的验证准确性比较。h. 设备在手腕不同位置和方向上的适应性,显示准确性差异可忽略。I.1–I.7表示电极阵列附着的不同位置和方向。 i. 使用来自6通道EMG输入的数字值进行手语预测。j. 代表字母A、N和R的批次归因图,以及相应的EMG信号和归因图。
为扩展系统应用范围,研究将GenENet用于步态动力学预测。实验通过三块测力板与视频同步采集步态过程中的地面反作用力与膝关节力学数据(图5a)。6通道EMG设备附着于小腿,输入预训练的GenENet编码器,并结合CNN-LSTM网络进行连续力值预测(图5b–c)。模型在整个步态周期中成功预测了地面反作用力,其预测值与真实值之间的R²系数达0.975(图5e),且在不同个体间表现一致(图5f)。通过逆动力学分析,系统还能预测膝关节内收力矩的变化趋势(图5h),为步态分析与运动健康评估提供了便捷的工具。该结果表明,紧凑型EMG阵列结合生成式学习算法,能在不依赖复杂实验室设置的条件下实现高精度的步态动力学监测。

图5. 使用GenENet设备预测步态动力学。a. 实验设置,涉及走过三个测力板并同时进行视频捕捉。后训练网络用于预测地面反作用力,而膝关节垂直力和力矩则基于视频数据通过逆动力学计算,并入动力学后训练数据集。b. 附着在小腿上的六通道EMG设备示意图。c. 步态周期中的地面反作用力预测,显示预测值与从视频数据获得的真实值密切匹配的五个不同阶段。d. 肌肉骨骼模型上实时预测地面反作用力的快照。e. 地面反作用力预测的确定系数R²为0.975。f. 对不同个体的适应性,显示他们之间一致的R²系数。g. 地面反作用力和膝内收力矩向量方向的示意图。h. 在特定时间间隔内预测的膝关节Y轴力和膝内收力矩。
综上,该研究通过结合生成式表示学习与柔性可穿戴传感技术,成功实现了用极少通道数EMG设备完成复杂手势识别与步态预测任务,突破了传统高密度传感的硬件限制。该系统在健康监测、康复工程、人机交互与运动分析等领域具有广泛的应用前景。未来可通过扩展训练数据覆盖范围、融合惯性传感器等多模态信息,进一步提升系统的鲁棒性与泛化能力,推动低功耗、高智能的可穿戴感知系统发展。
原文链接
https://www.nature.com/articles/s44460-025-00002-2
关于鲍哲南 鲍哲南,斯坦福大学终身教授,中国科学院外籍院士,美国国家科学院院士,美国国家工程院院士,美国艺术与科学院院士,美国国家发明家学院院士。
南京大学1987级本科生,1990年大学三年级时移民到美国。1995年获芝加哥大学博士学位,同年被贝尔实验室录用为正式研究人员。2004年加入美国斯坦福大学。鲍哲南于2017年升任斯坦福大学化学工程学院院长,是该校历史上第一位华人女院长。
鲍哲南院士的研究范围包括化学、材料科学、能源、纳米电子学和分子电子学等领域。她开创了多个用于有机电子材料的设计理念,使得柔性电子电路和柔性显示成为现实。已发表700多篇论文,被引超过19.7万次,谷歌学术H指数为233,拥有超100项美国授权专利。
-
可穿戴设备
+关注
关注
55文章
3899浏览量
170318 -
可穿戴传感器
+关注
关注
2文章
103浏览量
13171
发布评论请先 登录
MAX86174A/MAX86174B:可穿戴健康设备的理想光学传感器AFE
MAX86140/MAX86141:可穿戴健康监测的最佳光学传感器
小身材大作为:NRF52810-QFAA 在可穿戴与传感器的应用

美国加州理工学院:可穿戴柔性传感器最新突破!
中国科大:提出基于拓扑超构表面的可穿戴生物传感技术

10 INCH-D-PRIME-MV Amphenol All Sensors 板机接口压力传感器 AXCXL 10 DN P
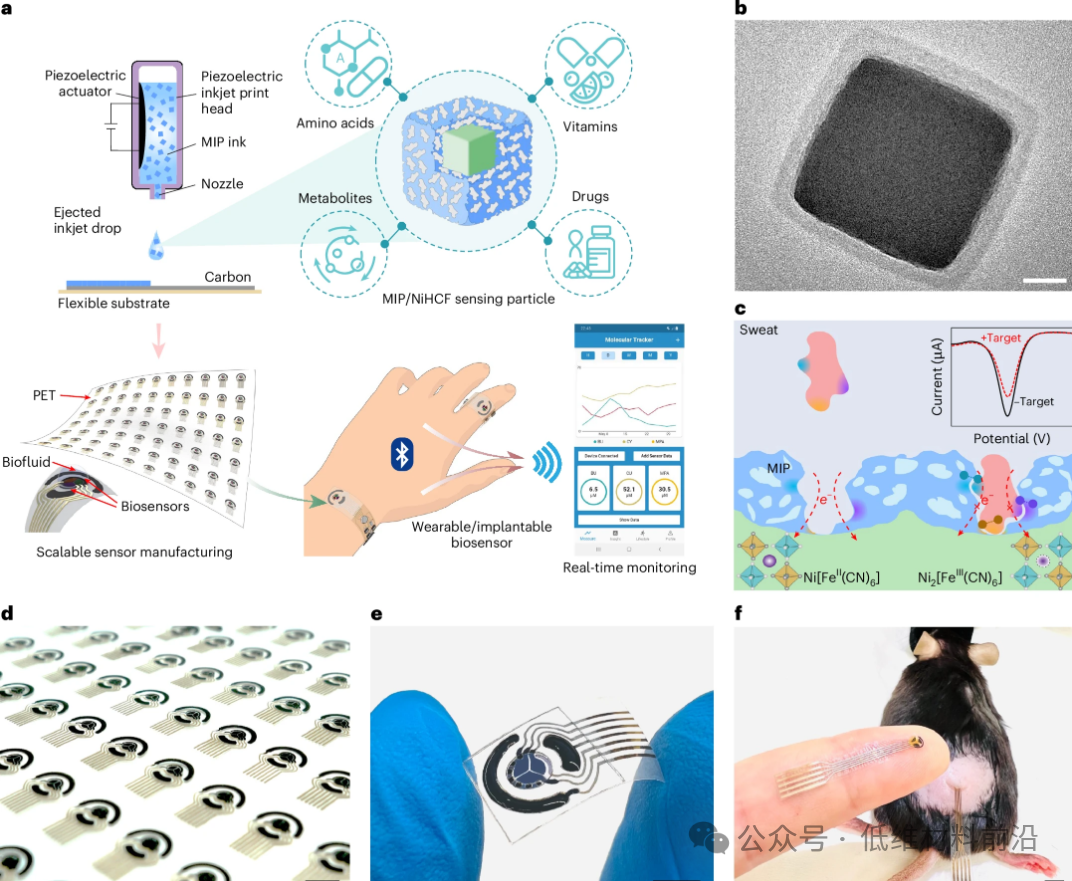
中科院长春应化所张强团队:面向持续无创健康监测的可穿戴汗液电化学生物传感器
Nordic发布超低电压蓝牙 SoC nRF54LV10A,医疗可穿戴设备福音
索尼基于时识科技Speck2f芯片打造可穿戴眼动追踪系统
Nature传感器新子刊第一篇论文出炉,中国青年学者联手撰写

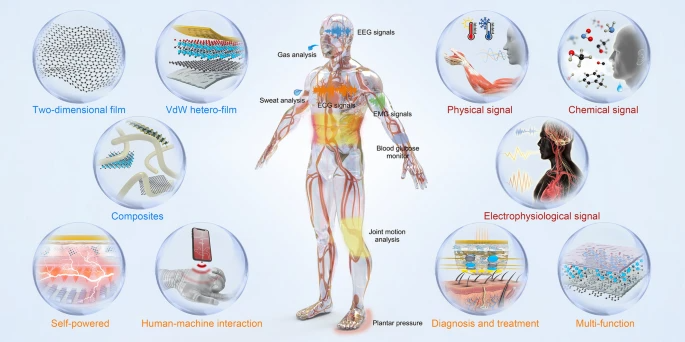
北京航空航天大学:基于二维材料的可穿戴生物设备—从柔性传感器到智能集成系统
可穿戴系列之全息无感化健康管理传感器

奥迪威“AI+传感器”方案引爆2025 Sensors Converge展会现场

赋能智慧未来:奥迪威“AI+传感器”系列产品方案亮相2025 Sensors Converge




评论