 关于移动机器人中定向磁电子罗盘的探究与设计
关于移动机器人中定向磁电子罗盘的探究与设计

磁电子罗盘是一种利用地磁场实现定向功能的装置,在移动机器人导航方面有着重要的应用价值。与传统的自主惯性导航设备相比,磁电子罗盘具有体积小、成本低、无累计误差、能够自动寻北等特点。与常规的指针型罗盘相比,磁电子罗盘在抗冲击性、抗震性等方面性能良好。并且能够对杂散磁场进行补偿,输出电信号.可方便地与其他电子设备组成应用系统。
本罗盘设计采用Philips公司的KMZ52磁阻传感器和Microchip公司的PIC16F818单片机。并对罗盘进行详细介绍。
1地磁场
由于地球本身具有磁性。在地球和近地空间之间存在磁场,称为地磁场。地磁场的强度为0.3高斯至0.6高斯,其大小和方向随地点(甚至随时间)而异。地磁场的北极、南极分别在地理南极、北极附近,彼此并不重合,而且两者间的偏差随时间缓慢变化。
本文设计的二维磁电子罗盘用于测量、计算磁场的方位角,并将其转换为电信号传输给移动机器人的控制器。此磁电子罗盘采用磁电阻传感器,移动机器人的控制器接收来自磁电阻传感器信号,此信号均为0 V~5 V模拟量,电压值的变化表现为航向角的不同,并且要求高可靠性和一定精度。
2各向异性磁阻传感器的测量原理
各向异性磁电阻效应是指对于强磁性金属(铁、钴、镍等及其合金),当外加磁场平行于磁场内部磁化方向时,阻值不变;若外界磁场方向偏离时,则其阻值减小;如果把这类金属做成薄膜带状导线,当电流通过时,其阻值大小随内外两磁场的合成磁化方向与电流流向的相对关系变化,趋于同向时阻值增大,背向时阻值减小。由于坡莫(NiFe)合金在弱磁场下的电阻变化率较大,因此适用于弱磁场中。
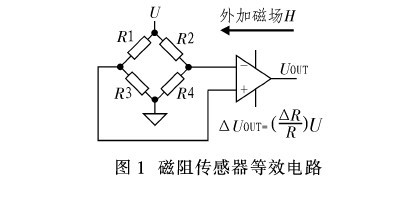
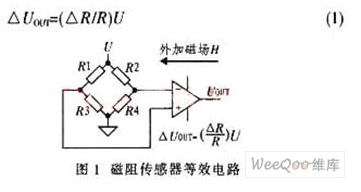
KMZ52是Philips公司生产的一种磁阻传感器,是利用坡莫合金薄片的磁阻效应测量磁场的高灵敏度磁阻传感器。该磁阻传感器内置两个正交磁敏电阻桥、完整的补偿线圈和设置/复位线圈。补偿线圈的输出与当前测量结果形成闭环反馈,使传感器的灵敏度不受地域限制。这种磁阻传感器主要应用于导航、通用地磁测量和交通检测。 该磁阻传感器在金属铝的表面沉积了一定厚度的高磁导率的坡莫合金,在翻转线圈和外界磁场两个力的作用下,电子改变运动方向,使得磁敏电阻的阻值发生变化。同时KMZ52的斑马条电阻成45°放置,这使得电子在正反向磁场力作用下有较好的对称性。由于加入了翻转磁场,KMZ52的变化曲线与普通的磁敏电阻不同,更加线性化。KMZ52磁阻传感器的核心部分是惠斯通电桥,是由4个磁敏感元件组成的磁阻桥臂。磁敏感元件由长而薄的坡莫合金薄膜制成。在外加磁场的作用下,磁阻的变化引起输出电压的变化。
如图1所示,KMZ52磁阻传感器的等效电路,其中,R1~R4的阻值均为R,供电电源为U。在外加偏置磁场H的作用下,R1和R4的磁化方向背向电流方向转动引起阻值减小。而R2和R3的磁化方向朝向电流方向转动,阻值增大△R。计算得:

3磁电子罗盘的硬件设计
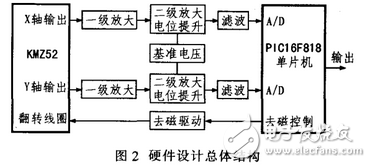
磁电子罗盘的硬件系统包括信号采集、信号处理、消磁电路、基准电压源和单片机等部分。其中信号处理包括一级放大、二级放大电位提升、滤波等3部分。采集到的信号经过放大滤波后送至单片机的A/D转换端口。经过单片机计算方向角后,传送至上位机,机器人的控制器对其处理。磁电子罗盘设计总体结构如图2所示。
3.1翻转线圈
磁阻传感器在使用一段时间后或受到外界瞬时高强磁场影响时,其信噪比降低,输出信号幅度减弱。为消除这种影响,必须在电路设计时考虑使用翻转线圈。与其他需要外部线圈的磁阻传感器不同,KMZ52是通过内部的置位/复位电流带实现的。该电流带是一个线绕式线圈,当线圈上有电流通过时,产生的磁场耦合到电桥上。除了提高信噪比外,该电流带还具有减小温漂和非线性误差的作用。
使用置位/复位电流带需要施加置位/复位脉冲,简称S/R脉冲。需要注意的是,S脉冲与R脉冲对传感器的影响相同,唯一不同的是传感器输出信号的改变。这是因为磁阻传感器有两种工作方式。其中,工作方式1输出电压与磁场强度成正比,而工作方式2输出电压与磁场强度成反比。对于置位/复位电流带输入正向的脉冲电流磁阻传感器为工作方式1;反之则是工作方式2。产生S/R脉冲电路称为置位/复位脉冲电路,是采用磁阻传感器作为磁场传感器所特有的。由于干扰磁场的影响,传感器输出具有固定偏差,设地磁场磁感应强度为G,传感器输出为Vn,则传感器工作在方式1时,V1=G+A;工作在方式2时,V2=-G+A。由此可得:
G=(V1-V2)/2 (2)
由式(2)可知,电路可通过翻转线圈达到消除偏差的目的。加以1 A的脉冲电流即可重新校准或反置传感内的磁敏组件,该脉冲宽度可短至3μs。本设计在每次上电后,由单片机发送去磁复位指令,经过去磁驱动电路,发送脉冲电流至翻转线圈,完成复位。去磁电路是由简单的三极管驱动电路构成。
3.2放大电路
在5 V电源电压下,磁阻传感器KMZ52的灵敏度为65 V/T。考虑到地磁场水平方向的磁场强度约为0.03 mT,KMZ52在地磁场的输出电压仅2 mV。因此,需要放大其输出的电压信号。而通用运算放大器一般都具有毫伏级的失调电压和每度数微伏的温漂,不能直接放大微弱信号。因此,一级放大电路采用仪表放大器AD620。
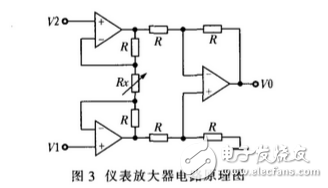
一般信号放大应用中,采用差动放大电路即可满足需求,但精度低,且变更放大增益时,必须调整两只电阻,影响整个信号放大精度。而仪表放大电路则无上述缺点。图3所示仪表放大器是由3个放大器组成,其中,电阻R与Rx范围为1 kΩ~10 kΩ。由固定电阻R通过调节Rx来调整放大的增益。其关系式如式(3)所示,须注意避免每个放大器产生饱和现象(放大器最大输出为其工作电压)。

磁阻传感器在地磁场中的输出范围为±2 mV,经AD620放大495倍后,变化范围为+990 mV,接近±1 V。二级放大电路采用LM324运放,构成同向加法器。经过二级运放后,电压提升2倍;再经电位提升2.5 V后,变化范围为0.5 V~4.5 V,符合单片机A/D转换要求。而电位提升电路所需2.5 V基准电压是由TL431三端可编程并联稳压二极管提供。
磁电子罗盘的数字信号处理器采用Microchip公司的8位PIC16F818单片机,对经过信号调理的磁电阻传感器输出信号进行采样、转换、处理、存储,并通过SPI串行通信模块响应来自PC机的命令及向PC机传输磁场、方位角数据。另外,单片机还为去磁电路提供控制信号。PIC16F818单片机的指令处理速度能够达到8 MHz.内部集成5通道的10位A/D采样转换模块,此A/D转换模块属于逐次逼近式A/D转换,具有转换速度高、精度高等特点,非常适用于那些需要实时信号处理的机器人传感器信号处理。另外,单片机内部的SPI串行通信模块实现传感器与机器人上位机的同步通信,将方位角的实时信息传送至上位机进行处理。
4磁电子罗盘的软件设计
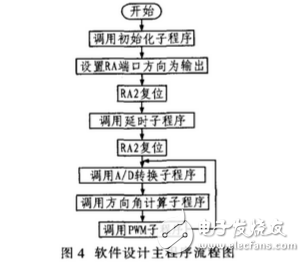
电子罗盘的软件设计程序包括:初始化子程序、A/D转换子程序、区域判断子程序、角度计算子程序以及PWM信号发生子程序。A/D转换采用RA0,RA1端口,去磁脉冲由RB0端口发送。图4为软件设计主程序流程。
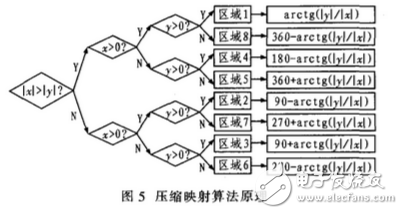
其中,方位角计算是软件设计的关键。采用一般反三角函数逼近的计算方法则涉及汇编语言浮点除法,编程占用大量空间,并且不易调试。而且反三角一般的计算范围是180°。对于360°还要进行额外判断。本系统设计采用压缩映射算法计算方位角α。图5为压缩映射算法测量原理图。x、y分别表示磁阻传感器的x、y轴上测得的磁场强度Hex、Hey。根据三角函数的轴对称性,先将0°~365°的情况压缩在0°~45°内进行查表,根据一定的规则将其重新映射至0°~365°范围内。采用这种方法可避免浮点运算,提高计算速度,降低程序的复杂性。
结束语
本文采用KMZ52磁阻传感器设计一种用于移动机器人定向用的电子罗盘。介绍了该电子罗盘的硬件系统,在信号调理电路中,采用内部线圈翻转和两级放大及电位提升电路,使传感器信号能够被PIC16F818经A/D转换后送到上位机处理。
-
电子罗盘
+关注
关注
1文章
124浏览量
24330 -
移动机器人
+关注
关注
2文章
819浏览量
34930 -
磁阻传感器
+关注
关注
0文章
82浏览量
18641
发布评论请先 登录
资料:移动机器人能否自动充电?
Labview My RIO 移动机器人
机器人、协作机器人和移动机器人,你分的清楚吗
如何实现移动机器人的设计?
请问怎么设计一种室外移动机器人组合导航定位系统?
什么是移动机器人软硬件系统问题
差速移动机器人轨迹跟踪控制方法
如何利用扫地机轮子制作ROS移动机器人地盘
基于KMZ52的移动机器人定向磁电子罗盘设计
一种用于移动机器人定向的磁电子罗盘设计
KMZ52磁阻传感器对移动机器人电子罗盘硬件系统的设计
ROS移动机器人中常用的编码器



评论