 瑞芯微Camera调试避坑指南:从Sensor到MIPI的常见问题全解析
瑞芯微Camera调试避坑指南:从Sensor到MIPI的常见问题全解析

在智能硬件领域,Camera模块是安防监控、车载影像、消费电子的核心组件——但调试过程中,“I2C不通”“画面偏绿”“MIPI数据采不到”等问题往往让工程师头大。
今天这篇文章,基于瑞芯微(Rockchip)官方Camera External FAQ(V2.1),梳理从Sensor初始化到MIPI传输、ISP处理的全链路常见问题,附带现象分析与分平台解决方案,帮你少走弯路,快速定位问题!
一、Sensor调试:先解决“源头”问题
Camera的核心是Sensor,若Sensor初始化或输出异常,后续链路再完美也无用。以下是4类高频Sensor问题的速解方案(适配瑞芯微RV1108/RV1126/RK356X等平台)。
1.最基础:Sensor I2C不通,提示“NO ACK”
问题现象:软件日志报“I2C NO ACK”,Sensor无法被识别。
关键原因:硬件供电/时序异常,或软件配置不匹配。
排查步骤(按优先级):
1.查Sensor硬件输入:确认AVDD/DVDD/DOVDD电源是否符合规格,复位脚/待机脚电平是否正确;
2.查I2C硬件:上拉电平是否与DOVDD匹配(避免3.3V上拉接1.8V DOVDD),MCLK时钟频率/幅度是否正常;
3.查主控配置:确认I2C通道是否正确,设备地址是否匹配,尝试降低SCL频率(过高会导致信号质量差);
4.特殊情况:部分Sensor不支持“I2C Repeat start”,需在驱动中关闭该功能。
2.最影响体验:曝光调整时画面闪烁(以OV2710为例)
问题现象:环境亮度骤变时,画面低概率闪烁,但最终曝光能收敛(亮度和速度正常)。
关键原因:曝光时间与增益的“生效帧不同步”——OV2710的曝光时间在N帧设置、N+2帧生效,而增益在N帧设置、N+1帧生效,两者变化趋势相反时就会闪。
分平台解决方案:
•RV1108(Linux SDK):在Sensor驱动中通过exposure_valid_frame定义生效帧数,参考《CIF_ISP11_Driver_User_Manual》,SDK已优化间隔设置;
•其他平台(Android 9.0/Linux):升级camera_engine_rkisp至v2.0.0+,按手册配置生效时序;
•旧系统(Android 8.1及以前):在IsiExposureControlIss函数中,给曝光时间与增益的设置加“帧率对应的延时”。
3.最直观:预览画面偏色(偏红/偏绿)
情况1:整体均匀偏红
问题现象:画面蒙一层淡红,色卡色调正常,遮黑后Raw图黑电平异常。
原因:Sensor输出黑电平与ISP校正值不匹配,或数据位宽压缩(如A-Law算法)导致线性失真。
解决:
•测Raw图黑电平:ON2 Sensor(8bit=10,10bit=42)、OV Sensor(8bit=[3,4])、IMX327(10bit=60,12bit=240),按规格配置寄存器;
•关闭压缩功能:如AR0144需将R0x31D0设为0,禁用A-law压缩,确保数据线性化。
情况2:镜像/翻转后偏色(以GC2375为例)
问题现象:配置mirror/flip后偏色,Raw图Bayer顺序异常。
原因:镜像后Sensor输出Bayer顺序变化(如BGGR→GBRG),但ISP未同步更新。
解决:
•用宏定义配置镜像:避免直接改寄存器,如#define GC2375_MIRROR_NORMAL;
•更新驱动Bayer顺序:RV1108改struct ov_camera_module_config.frm_fmt.code,其他平台改IsiSensorCaps_t.BayerPatttern。
4.最隐蔽:MCLK时钟幅度异常(仅200mV或无输出)
问题现象:示波器测MCLK幅度不足(正常需符合Sensor Spec),或无时钟信号。
原因:主控IO复用配置错、电源域未供电,或软件与硬件电源域不匹配。
解决:
1.查IO复用:按平台手册确认CIF_CLKOUT引脚配置(如RK3326的CIF_CLKO_MO对应GPIO2_B3_d);
2.查电源域:RK3326的CIF_CLKO_MO依赖VCCIO3,若硬件接1.8V则在DTS中配置vccio3-supply = <&vcc1v8_dvp>;RK3399的APIO2_VDD接3.0V则设bt656-supply = <&vcc_3v0>。
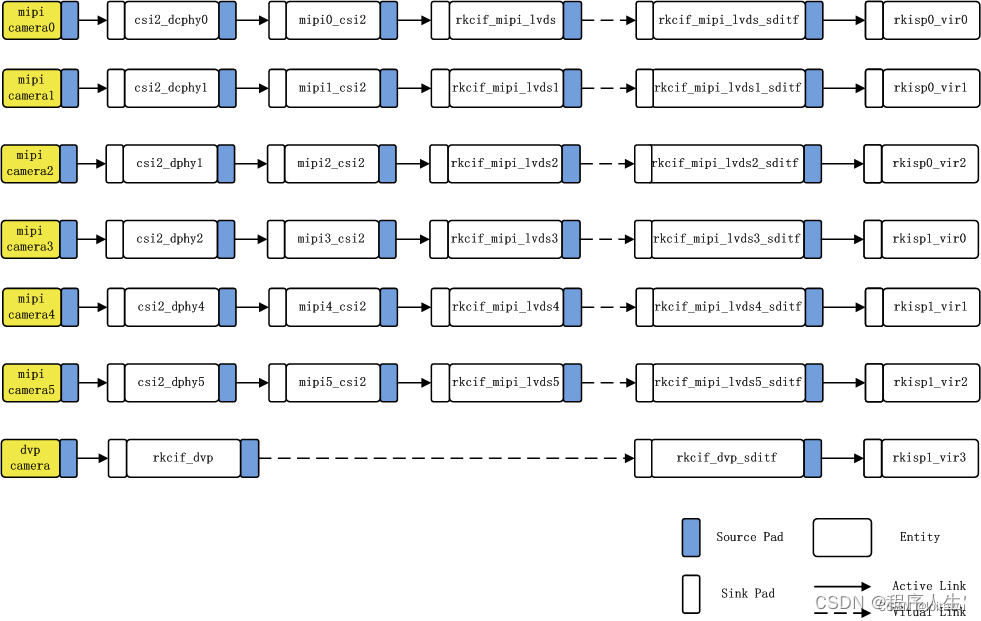
二、MIPI接口:数据传输的“命脉”调试
MIPI是Sensor与主控之间的核心链路,一旦出错会导致“花屏”“采不到数据”“FIFO溢出”。先明确MIPI错误分类,再按优先级排查!
1.先搞懂:MIPI错误分3级,排查有顺序
瑞芯微将MIPI错误按“链路层级”分类,必须先解决底层错误,再处理上层:
1.DPHY Level:物理层错误(如SOT错误、False Control Error);
2.CSI-2 Controller Level:控制器错误(如CsiFifoOverflow);
3.CSI-2 Packet/Protocol Level:数据包/协议错误(如CRC/ECC错误、ErrFrameSync)。
若日志无明确错误,但采不到数据,先查DPHY状态寄存器(如RV1126的0xffb51c14),重点看:
•RxClkActiveHS:1=CLK Lane有有效高速时钟;
•StopstateData:0/1交替= Data Lane正常传输(高速与停止状态切换);
•RxUlpsExc:0=Data Lane未进入超低功耗(高速传输时需为0)。
2.高频场景:MIPI采不到数据,且无报错
问题现象:I2C通讯正常,Sensor已输出数据,但主控端无MIPI错误提示,VICAP/ISP报“未采集到数据”。
排查步骤:
1.先查RxClkActiveHS:
◦若为0:用示波器测CLK Lane是否有高速时钟,检查Sensor是否Stream on,硬件连接是否断连;
◦若为1:查StopstateData,若某Lane无0/1变化,测该Lane信号幅度是否符合DPHY Spec(如LP态1.2V,HS态200mV)。
1.特殊情况(CLK Lane Continue模式):
◦若UlpsActiveNotClk为0(CLK Lane进入ULPS),需排查上电波形是否有异常的LP10→LP00(导致误触发ULPS);
◦若SOT序列(LP11→LP01→LP00→HS-0)发送早于DPHY初始化,需让Sensor在主控DPHY就绪后再输出SOT。
3.易错点:D-PHY错误(ErrSotHS/ErrSotSyncHS)
问题现象:日志报“D-PHY Level Error: ErrsotHS/ErrSotSyncHS”,画面花屏或采不到数据。
原因:SOT(传输起始)时序不符合MIPI Spec,或Ths-settle(HS接收稳定时间)配置错误。
解决:
1.满足时序要求:
◦Ths-settle > Ths-prepare(40ns+4UI);
◦Ths-settle < Ths-prepare + Ths-zero(145ns+10UI);
◦CLK Lane需提前8UI输出HS时钟(TCLK-PRE)。
1.配置Ths-settle:
◦DPHY-I(RK3326/RV1108):按bitrate选寄存器,如1.25Gbps对应4b'1100,Ths-settle=128UI;
◦DPHY-S(RK3399/RK3288):1.3-1.5Gbps对应4b'1100,Ths-settle=63×received_DDR_clock。
4.致命错:CsiFifoOverflow(FIFO溢出)
问题现象:日志报“CSI-2 Controller Error: CSIFIFOOVERFLOW”,数据丢失。
原因:ISP吞吐率跟不上MIPI传输速率,或多Lane数据时延不同步。
解决:
1.先查DPHY错误:若有底层错误(如SOT错误),优先解决;
2.验证速率匹配:按公式计算(保守值):
ISP时钟(Hz) × 80% > (MIPI bitrate × Lane数) / 12
例:ISP时钟500MHz,MIPI 1Gbps×2Lane → 500e6×0.8=400e6,(1e9×2)/12≈166e6,满足要求;
3.多Lane同步:用示波器测各Data Lane的SOT时序,时延差需≤1UI,否则调整硬件走线。
三、ISP与数据传输:避免“最后一公里”问题
Sensor和MIPI正常后,ISP处理异常会导致“丢帧”“画质差”,以下是2类核心问题。
1. PIC_SIZE_ERROR:分辨率不匹配
问题现象:日志报“CIF_ISP_PIC_SIZE_ERROR”,ISP采集数据量与设置分辨率不符。
排查步骤:
1.先查MIPI/DPHY错误:若有则优先解决(如数据传输不完整);
2.验证分辨率设置:确保ISP采集分辨率≤ Sensor输出分辨率(如Sensor输出1920×1080,ISP不能设2560×1440);
3.后级限制:若前两步正常,排查ISP输出链路(如DDR带宽不足),参考“Data loss”解决方案。
2. Data loss:数据丢失(最常见)
问题现象:日志报“CIF_ISP_DATA_LOSS”,预览闪粉屏/绿屏,或录制丢帧。
原因:ISP内部Latency FIFO溢出,多因DDR速率不足或AXI优先级低。
解决:
1.优化DDR:提高DDR频率,禁用DDR变频(传输中变频会导致卡顿);
2.提高ISP优先级:在DTS中设ISP AXI Master优先级最高(如rockchip,priority=<33>);
3.增加Sensor H-blanking时间:减少数据传输压力;
4.旧系统修复:Android 8.1及以前版本,升级kernel-3.10驱动至v0.0x26.0+,解决绿屏无法恢复问题。
四、调试必备:工具与参考文档
1.硬件工具:示波器(测MCLK、MIPI Lane波形)、逻辑分析仪(抓I2C时序);
2.软件工具:查看MIPI错误寄存器(如RK3399 ISP0寄存器0xff911c0c)、DPHY状态寄存器(参考文档附录G);
3.官方手册:
◦《CIF_ISP11_Driver_User_Manual》(RV1108驱动);
◦《RKISP_Driver_User_Manual》(其他平台);
◦《mipi_D-PHY_specification_v2.1》《mipi_CSI-2_specification_v2.0》(MIPI标准)。
最后:调试的核心逻辑
Camera问题看似杂乱,实则有章可循——先定位层级(Sensor→MIPI→ISP),再抓关键信号(电源、时钟、数据):
•Sensor层:先确保供电、I2C、MCLK正常;
•MIPI层:先查DPHY状态,再按错误级别排查;
•ISP层:先解决前级数据传输问题,再优化速率与优先级。
你在Camera调试中遇到过哪些“奇葩”问题?比如“正对太阳出现纵向黑条”(SC410AI)、“HDR低光下带状条纹”(IMX415)?欢迎在评论区分享,一起避坑!
-
调试
+关注
关注
7文章
656浏览量
36061 -
MIPI
+关注
关注
11文章
374浏览量
51181 -
瑞芯微
+关注
关注
27文章
903浏览量
54736
发布评论请先 登录
一文搞懂瑞芯微平台Trust架构:从原理到问题排查全解析

瑞芯微RK平台Android音频 EQ/DRC调试全攻略

别让连接器毁了你的设计:三大常用连接器选型陷阱与避坑指南
瑞芯微RK3399开发板注册一个 Camera Sensor 设备方法
瑞芯微RK3399嵌入式开发板注册一个 Camera Sensor 设备方法
记录一下调试rk3288-android9下的ov13850遇到的坑
PCBA代工避坑指南:常见问题+解决方案全解析
京东商品详情接口实战解析:从调用优化到商业价值挖掘(附避坑代码)

瑞芯微RKNPU开发全指南:从环境搭建到性能优化,一文搞定边缘AI部署
linux系统下M.2硬盘调试和测试全指南:从初始化失败到读写满速,避坑就看这篇
手把手教你选家电电源芯片:隔离 vs 非隔离全解析(附实测设计要点 + DIY 避坑指南)




评论