 无人机ESC高速无传感器FOC参考设计
无人机ESC高速无传感器FOC参考设计

ESC模块是非军用无人机中非常重要的子系统;如果用户需要更高效的机型来实现更长的飞行时间、更好的动态行为和更加平顺、稳定的性能,那么非常适合使用此类模块。TI的设计采用了通常用于无人飞行器(UAV)或无人机的电子调速器(ESC)。
速度控制通过无传感器的方式完成,并使用FOC速度控制技术对电机进行了电气频率高达1.2kHz(对于6极对电机而言为12kRPM)的测试。
无人机 ESC高速无传感器FOC参考设计拥有一流的FOC算法实施,可实现更长的飞行时间、更佳的动态性能,且具有更高的集成度,因此电路板尺寸更小,BOM组件更少。
无传感器高速FOC控制技术使用TI的FATM软件观测器,利用了InstaSPIN-MotionTM C2000TM LaunchPadTM和DRV8305 BoosterPackTM。
特性
InstaSPIN-FOC™无传感器FOC可实现更高的动态性能。经测试高达12,000 RPM(使用3节锂聚合物电池);
高动态性能:在不到0.2s时间内达到1 kRPM到10 kRPM(电气频率100Hz至1kHz)转速,可实现高性能偏转和俯仰动作;
适于完成翻转动作的快速翻转能力;
由于块交换上更高的FOC效率,可实现更长的飞行时间;
更高的PWM开关频率(经测试高达60kHz),可针对低电感高速电机降低电流/扭矩纹波,并且可以避免超声波传感器;
由于InstaSPIN-FOC的自动电机参数识别,缩短了上市时间:自动调优无传感器FOC解决方案;
针对绕组电阻变化进行电机温度估算,以保护电机在临时过载情况下免受损坏。
应用领域
无人机和UAV
高速电机
电池供电的电动工具
1.系统说明
就无人机而言,完整无人机飞行系统包含的不同子系统通常涉及到以下模块定义。
无人机飞行系统模块
(1)无人机的ESC功能要求
ESC定义了无人机的动态运动性能和飞行时间。无人机必须能够完成的一些运动模式包括:
精确运动模式:航行、悬停
快速运动模式:沿x/y/z方向360°旋转、水平最高速度飞行、垂直最高速度飞行
为了提供这些功能,需要使用优秀的ESC来控制所用电机在所有速度下产生的升力。这样一来,基于位置传感器模块的稳定算法可以补偿影响无人机的振动和外力。
能够改变的电机速度越快,稳定算法需要执行的速度变化就越少;因此,使用的能量少于无人机以高度变化的速度运行的情况下(使用动态性较差的ESC时便属于这种情况)所需的能量。
(2)正弦控制型ESC模块
以1到5度的最小精度测量转子的磁场角度,从而使用FOC算法确保最大扭矩,或根据电机的相电压和相电流估算转子磁角(无传感器算法)。
下图显示三个相位的典型PWM高侧和低侧图形,并显示了以正弦控制方式运行电机时消除PWM载波后的相应理想滤波相电压。
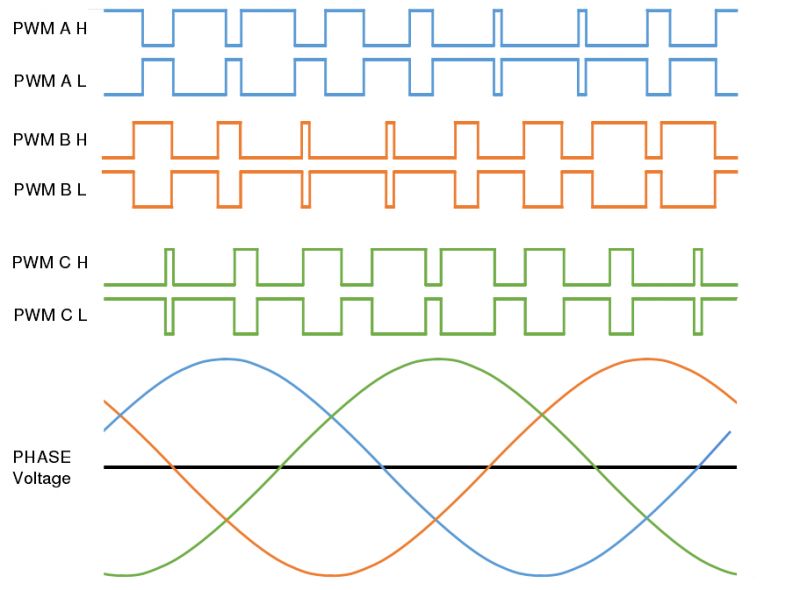
生成理想的PWM正弦相电压
在开环控制中,同步电机(BLDC或BLAC)由控制信号进行盲目驱动,并假定该电机会跟随指定的控制动作。
为确保电机正确运行,需要在绕组上施加比理想电流更大的电流来强制该运动。最终,这是开环控制电机与闭环控制电机相比系统效率降低的主要原因。
在闭环控制中,电机控制系统能够测试电机是否按照预期运行。如果不能按预期运行,控制环路会自动通过减少或增加电流进行补偿。
无论是使用闭环控制还是使用无传感器算法,都必须测量电流和电压信号,以便将这些信号用作反馈信号。
对于正弦控制,应测量最多三个分流电流。进行电压测量时,应选择仅测量DC link电压还是同时测量三相电压和DC link电压。
(3)电子调速器(ESC)
无人机的发动机运行速度必须按照无人机的重量和螺旋桨的尺寸确定,以便产生无人机飞行所需的升力。为无人机设计的典型三相无刷电机具有以下常见特性:
低电感
低电阻
两到八个极对
1000Hz或更高的电气频率
该电机采用优化设计,可由包含两节至六节电池(即7.4V至22.2V直流电压)的铿聚合物电池供电。这些电压用于设计所选电机的最大速度。
此处的一个常见问题是以最大速度运行接近Veus的电机,因为此处的FOC算法和无传感器算法都必须足够出色才能支持此运行方式。
本报告中使用的ESC适用于使用无传感器算法的三相无刷电机。该ESC模块的组件如下图所示。
无人机ESC的框图
2.系统规格
本系统需要一个具有感能力的三相半桥功率级,以便生成无传感器算法所需的反馈信号。
此功率级必须由包含两节至六节电池(即Veus为7.4V至22.2V)的铿聚合物电池供电。
由于电机和依赖于频率的传感器具有较低的时间常数,因此PWM频率较高;典型的电流设计使用大约45kHz至60kHz的PWM频率,并有进一步增加的趋势。其次需要一种与飞行控制器通信的方式,可使用占空比或串行通信方式完成。

3.原理方框图
系统方框图
4.核心器件
(1)TM S320F2806xF
F2806xF PiccoloTM系列微控制器(MCU)将C28x内核和控制律加速器(CLA)的性能与高度集成的控制外设整合到低引脚数的器件中。
一个内部稳压器实现了单电源轨运行。高分辨率脉宽调制器(HRPWM)模块经过强化以实现双边沿控制(频率调制)。该器件内还新增了采用10位内部基准的模拟比较器,可通过与其直接相连来控制ePWM输出。
ADC可在OV至3.3V的固定满量程范围内实施转换,并支持比例式 VREFHI/VREFLO基准。ADC接口已针对低开销和延迟进行了优化。
该器件在专用于执行的ROM中包含专用的电机控制软件以实现InstaSPIN-FOC 解决方案,并通过MotorWare提供系统软件支持。
(2)DRV8305
DRV8305是一款适用于三相电机驱动应用的栅极驱动器IC而设计。该器件提供三个高精度修整和温度补偿的半桥驱动器,每个驱动器能够驱动一个高侧和低侧增强模式N沟MOSFET。
DRV8305具有三个基于电流器的电流检测放大器,可实现对电流的精确测量,支持100%占空比,并且具有多级保护。通过串行外设接口(SPI)可以对该栅极驱动器进行编程。
(3)LMR16006
该PWM直流/直流降压稳压器具有4V至60V的宽输入电压范围,适用于从工业到汽车的广泛应用中非稳压电源的电源调节。该稳压器在ECO模式下的待机电流为28μA,非常适合电池供电类系统。
(4)CSD18540Q5B
这款款 60V 1.8mΩ SON 5mm×6mm NexFET™ 功率MOSFET可用于最大限度地降低电源转换应用中的损耗。
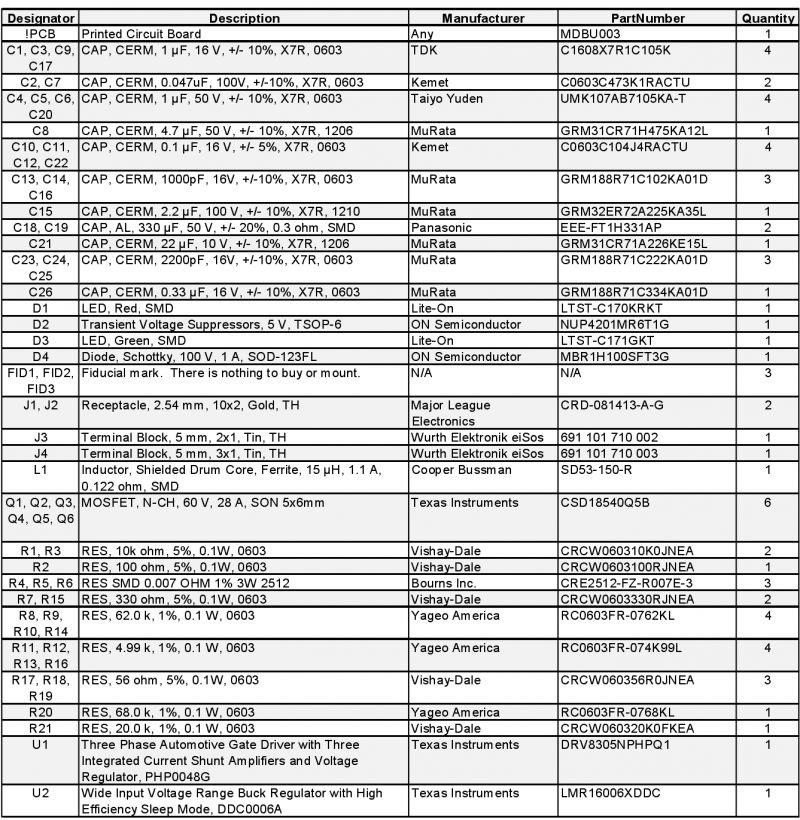
BOM物料清单
5.PCB
下图分别显示了LaunchPad和BoosterPack PCB的顶部和底部图片。
完整系统电路板图片(顶视图)
LaunchPad电路板图片(顶视图)
华强芯城商城有售核心部件DRV8305,LMR16006,CSD18540Q5B,库存丰富,欢迎垂询。
-
传感器
+关注
关注
2577文章
55443浏览量
793723 -
无人机
+关注
关注
237文章
11365浏览量
196624 -
FOC
+关注
关注
21文章
401浏览量
46435
原文标题:想让你的无人机飞得更稳更久?看这文就够了
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
无人机为啥都用 MS4525DO 空速计?

春晚无人机炸场!低空经济轻量化密码,藏在石英谐振压力传感器里
无人机激光传感器辅助降落原理

无人机激光测距传感器使用指南

MCF8329A:助力无传感器FOC控制的高效解决方案

Amphenol AUAV双压力传感器系列:无人机应用的精准之选

植保无人机选择什么液位传感器?

高帧频,Cameralink Full接口,高速无人机对抗AI模块Viztra-HE052F

离轴技术:赋能无人机精准配送的核心芯片应用
用树莓派打造无人机,你需注意的事项!

安森美图像传感器在无人机系统的应用

优化无人机航向控制的核心:IST8310飞控地磁传感器解析




评论